Você também pode gostar
- La ecuación general de segundo grado en dos y tres variablesNo EverandLa ecuación general de segundo grado en dos y tres variablesAinda não há avaliações
- 8 TLDocumento3 páginas8 TLDiego SosaAinda não há avaliações
- TEMA 5 Transformaciones LinealesDocumento4 páginasTEMA 5 Transformaciones LinealesLalo AlmarazAinda não há avaliações
- Serie Algebra Lineal TEMA 5Documento6 páginasSerie Algebra Lineal TEMA 5Darío Fernando Núñez HernándezAinda não há avaliações
- Trabajo Final Mat 103Documento3 páginasTrabajo Final Mat 103David HGAinda não há avaliações
- 1 - Guía de Prácticas Transformaciones-1Documento1 página1 - Guía de Prácticas Transformaciones-1pabelAinda não há avaliações
- Ejercicios Complementarios 2da Parte - AgaDocumento23 páginasEjercicios Complementarios 2da Parte - AgaJulia TedeschiniAinda não há avaliações
- Practica 03 MAT103 II-2019Documento4 páginasPractica 03 MAT103 II-2019CesarAinda não há avaliações
- Practica 3MAT103Documento6 páginasPractica 3MAT103Miguel ÁngelAinda não há avaliações
- 8 Transformaciones LinealesDocumento12 páginas8 Transformaciones LinealesGonzalo GalvezAinda não há avaliações
- Practica de Algebra Lineal 3 Er ParcialDocumento8 páginasPractica de Algebra Lineal 3 Er Parcialjose fernandoAinda não há avaliações
- 2020II 04 Tarea Funciones Vectoriales PDFDocumento3 páginas2020II 04 Tarea Funciones Vectoriales PDFJoseph Condori CahuiAinda não há avaliações
- LISTADO Ejercicios de TRANSFORMACIONES LINEALESDocumento2 páginasLISTADO Ejercicios de TRANSFORMACIONES LINEALESAlejandro GarcésAinda não há avaliações
- Taller AL3Documento4 páginasTaller AL3Juan Angel Mendieta ArenasAinda não há avaliações
- Tarea6 PDFDocumento1 páginaTarea6 PDFDanielalxAinda não há avaliações
- Alg Lineal 03Documento7 páginasAlg Lineal 03Axssell Jurguen Cutipa QuispeAinda não há avaliações
- Practico 8.autovalores 2019Documento3 páginasPractico 8.autovalores 2019Fabian PazAinda não há avaliações
- Ejercicios de Transformacion LinealDocumento3 páginasEjercicios de Transformacion LinealBelen Rodriguez MarcaAinda não há avaliações
- Rpaterni - Núcleo e Imagén de Una Transformación LinealDocumento11 páginasRpaterni - Núcleo e Imagén de Una Transformación LinealGiovaniArenasAinda não há avaliações
- Algebra Lineal 1 Junio 2012Documento2 páginasAlgebra Lineal 1 Junio 2012maferfranciaAinda não há avaliações
- Special Matrices Toeplitz EsDocumento6 páginasSpecial Matrices Toeplitz EsMariaVictoriaGutierrezAinda não há avaliações
- FMM (P) 312 s8 EjerciciosDocumento2 páginasFMM (P) 312 s8 Ejercicioslomejor delalifeAinda não há avaliações
- FMM110 Gui6Documento4 páginasFMM110 Gui6Daniel CéspedAinda não há avaliações
- PRACTICA #03-Mate3Documento4 páginasPRACTICA #03-Mate3Angel CondoriAinda não há avaliações
- Tema2 1314 PDFDocumento5 páginasTema2 1314 PDFKatee SoloteNecesitoatiAinda não há avaliações
- Practico 7Documento5 páginasPractico 7Análisis UnseAinda não há avaliações
- Taller Cálculo VectorialDocumento2 páginasTaller Cálculo VectorialJHONY ALEJANDRO MAVISOY VILLOTAAinda não há avaliações
- 5) Integrales de Línea PDFDocumento63 páginas5) Integrales de Línea PDFmarceloAinda não há avaliações
- Algebra Lineal 2024: Coordenadas, Cambio de Base, Transformaciones Lineales IDocumento3 páginasAlgebra Lineal 2024: Coordenadas, Cambio de Base, Transformaciones Lineales IJuliana RivasAinda não há avaliações
- 3.1 Funciones VectorialesDocumento22 páginas3.1 Funciones VectorialesEvelynMilagrosAinda não há avaliações
- Tarea de Transformaciones Lineales 2023Documento4 páginasTarea de Transformaciones Lineales 2023Victor MontielAinda não há avaliações
- Examen GAL 1 Julio 2023 VF Con Soluciones v2Documento5 páginasExamen GAL 1 Julio 2023 VF Con Soluciones v2SakiAinda não há avaliações
- Taller 4 CI20221Documento2 páginasTaller 4 CI20221manuel meloAinda não há avaliações
- Practica - 4 Transformaciones Lineales A2Documento4 páginasPractica - 4 Transformaciones Lineales A2Freddy CuestasAinda não há avaliações
- Transformaciones Lineales Ejresuelto y Autoevaluacion PDFDocumento11 páginasTransformaciones Lineales Ejresuelto y Autoevaluacion PDFleanAinda não há avaliações
- Transformaciones Lineales-Autovalores y AutoveDocumento2 páginasTransformaciones Lineales-Autovalores y AutoveAquiles GuardoAinda não há avaliações
- Taller Pre-Parcial 3Documento5 páginasTaller Pre-Parcial 3Salima GutierrezAinda não há avaliações
- Guía de Ejercicios para El Parcial Del Primer CorteDocumento2 páginasGuía de Ejercicios para El Parcial Del Primer Corteandrea ospinoAinda não há avaliações
- T3P2-Nucle e ImagenDocumento4 páginasT3P2-Nucle e Imagenemmabouzon.sAinda não há avaliações
- Taller 1Documento5 páginasTaller 1SantiagoRivas100% (1)
- Deber Algebra1Documento2 páginasDeber Algebra1dario barretoAinda não há avaliações
- Problemas de Funciones Vectoriales (BMA02 G-I)Documento2 páginasProblemas de Funciones Vectoriales (BMA02 G-I)MARIELLA YANNET MARTINEZ LLERENAAinda não há avaliações
- TP1 Con EnlacesDocumento7 páginasTP1 Con EnlacesVanesa MendezAinda não há avaliações
- Taller #1 Cálculo III PDFDocumento2 páginasTaller #1 Cálculo III PDFBrayan PinedaAinda não há avaliações
- Taller Calculo Vectorial Primer ParcialDocumento4 páginasTaller Calculo Vectorial Primer ParcialManuela Ospina GiraldoAinda não há avaliações
- Cur 6 001 CM Notas 002 Funciones RaRn ProblemasDocumento5 páginasCur 6 001 CM Notas 002 Funciones RaRn Problemasriveramaria2153Ainda não há avaliações
- Taller Marzo 4 2024Documento3 páginasTaller Marzo 4 2024Alejandro TabarescAinda não há avaliações
- Taller 3Documento2 páginasTaller 3arley hoyos100% (1)
- Practica 3P MAT103Documento4 páginasPractica 3P MAT103Daniel FeymanAinda não há avaliações
- Apunte 4 Algebra LinealDocumento35 páginasApunte 4 Algebra Linealyordan aguilar ruizAinda não há avaliações
- TP 1 (Álgebra Lineal y Estática Comparativa)Documento21 páginasTP 1 (Álgebra Lineal y Estática Comparativa)Ivan cabrejo millAinda não há avaliações
- Lista de Ejercicios - 2024-1Documento5 páginasLista de Ejercicios - 2024-1junior.herrera.sAinda não há avaliações
- Trabajo de VectoresDocumento2 páginasTrabajo de VectoresSantos Anibal Raico CusquisibanAinda não há avaliações
- Transformacion Lineal PDFDocumento7 páginasTransformacion Lineal PDFCésar SánchezAinda não há avaliações
- GretrgDocumento13 páginasGretrgjesusgranados257Ainda não há avaliações
- Calculo MultivariableDocumento3 páginasCalculo MultivariableSebastian AlarconAinda não há avaliações
- Finales Alg. LinealDocumento23 páginasFinales Alg. LinealEdwin FuentesAinda não há avaliações
- Practica 6 22-2Documento2 páginasPractica 6 22-2Hernan Saa EnriAinda não há avaliações
- Guia 2 Esp. VectorialesDocumento5 páginasGuia 2 Esp. VectorialesJaviera Montserrat Rivera MenaresAinda não há avaliações
- SERIE 2a PDFDocumento2 páginasSERIE 2a PDFRaul OvsAinda não há avaliações
- Repasosos de HistoriaDocumento20 páginasRepasosos de HistoriaRonaldo ApazaAinda não há avaliações
- Repasosos de HistoriaDocumento20 páginasRepasosos de HistoriaRonaldo ApazaAinda não há avaliações
- Whikipedia EnciclopediaDocumento19 páginasWhikipedia EnciclopediaRonaldo ApazaAinda não há avaliações
- La PapayaDocumento20 páginasLa PapayaRonaldo ApazaAinda não há avaliações
- La PapayaDocumento20 páginasLa PapayaRonaldo ApazaAinda não há avaliações
- Documento ImporatnteDocumento19 páginasDocumento ImporatnteRonaldo ApazaAinda não há avaliações
- Whikipedia EnciclopediaDocumento19 páginasWhikipedia EnciclopediaRonaldo ApazaAinda não há avaliações
- Practica 3Documento5 páginasPractica 3Ronaldo ApazaAinda não há avaliações
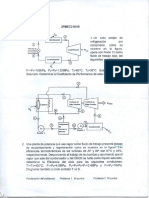
- Problemas TermodinámicaDocumento1 páginaProblemas TermodinámicaRonaldo ApazaAinda não há avaliações
- Documento ImporatnteDocumento19 páginasDocumento ImporatnteRonaldo ApazaAinda não há avaliações
- Examenes FinalesDocumento19 páginasExamenes FinalesRonaldo ApazaAinda não há avaliações
- ExamenesDocumento19 páginasExamenesLUIS RONALDO APAZA NISTAZAAinda não há avaliações
- Examenes FinalesDocumento19 páginasExamenes FinalesRonaldo ApazaAinda não há avaliações
- ExamenesDocumento19 páginasExamenesLUIS RONALDO APAZA NISTAZAAinda não há avaliações
- ExamenesDocumento19 páginasExamenesLUIS RONALDO APAZA NISTAZAAinda não há avaliações
- GUIA LABORATORIO No 4-OCTUBRE DE 2020Documento12 páginasGUIA LABORATORIO No 4-OCTUBRE DE 2020Ronaldo ApazaAinda não há avaliações
- El Sector Industrial Textil en BoliviaDocumento12 páginasEl Sector Industrial Textil en BoliviaSarah Kennedy67% (3)
- Fibras Textiles Trabajo FinalDocumento3 páginasFibras Textiles Trabajo FinalRonaldo ApazaAinda não há avaliações
- Lab5 SDL 200 FLIP FLOP JKDocumento9 páginasLab5 SDL 200 FLIP FLOP JKRonaldo ApazaAinda não há avaliações
- Hilatura Del AlgodonDocumento35 páginasHilatura Del AlgodonRoberto OrdayaAinda não há avaliações
- PropiedadesdelasfibrastextilesDocumento5 páginasPropiedadesdelasfibrastextilesM.José Copons GalloAinda não há avaliações
- TextilDocumento8 páginasTextilRonaldo ApazaAinda não há avaliações
- ENTROPIADocumento6 páginasENTROPIARonaldo ApazaAinda não há avaliações
- Las Fibras SintéticasDocumento15 páginasLas Fibras SintéticasRonaldo ApazaAinda não há avaliações
- Lab 2 TXLDocumento6 páginasLab 2 TXLRonaldo ApazaAinda não há avaliações
- Pirognostico de Fibras TextilesDocumento9 páginasPirognostico de Fibras TextilesRonaldo ApazaAinda não há avaliações
- Shara ESIPDMDocumento8 páginasShara ESIPDMRonaldo ApazaAinda não há avaliações
- RESONANCIADocumento11 páginasRESONANCIAOliver Adalid Cruz Limachi100% (1)
- Formulacion OrganicaDocumento32 páginasFormulacion Organicakktua23Ainda não há avaliações
- Lab1 TXLDocumento5 páginasLab1 TXLRonaldo ApazaAinda não há avaliações
- Gestion Del Capital Humano Componentes Mapa Mental Kelly MDocumento5 páginasGestion Del Capital Humano Componentes Mapa Mental Kelly MKELLY ALEJANDRA MUÑOZ ALFONSOAinda não há avaliações
- GEOMARKETINGDocumento13 páginasGEOMARKETINGLizbethReyesOAinda não há avaliações
- Resolucion 2646 de 2008 Riesgos PsicosocialesDocumento8 páginasResolucion 2646 de 2008 Riesgos PsicosocialesAstrid M. Sandoval BautistaAinda não há avaliações
- B Gaming SaDocumento15 páginasB Gaming SaSebastian RodriguezAinda não há avaliações
- Apuntes Medina Legal - by Shirley C.JDocumento6 páginasApuntes Medina Legal - by Shirley C.JShirley CambindoAinda não há avaliações
- Muy Gagsioso, MagiaDocumento32 páginasMuy Gagsioso, MagiatatomenducoAinda não há avaliações
- Dismorfia Muscular VDocumento10 páginasDismorfia Muscular VBrayan Alexis Avendaño JimenezAinda não há avaliações
- La Normativa LingüísticaDocumento12 páginasLa Normativa LingüísticaYaira CerdasAinda não há avaliações
- Corrector OTISDocumento6 páginasCorrector OTISEduardo Gacitúa ReyesAinda não há avaliações
- Enfoque Globalizador y CompetencialDocumento42 páginasEnfoque Globalizador y CompetencialPlinio El ViejoAinda não há avaliações
- El Obstaculo Del AmorDocumento3 páginasEl Obstaculo Del AmorOficina Atencion VeteranoAinda não há avaliações
- Modulo 1 DerechopenalDocumento197 páginasModulo 1 DerechopenalluksnordesteAinda não há avaliações
- Desafío de AcentuaciónDocumento10 páginasDesafío de AcentuaciónMariela RivasAinda não há avaliações
- Guias ChingonasDocumento25 páginasGuias Chingonasromina romanica0% (2)
- Educacion EspecialDocumento21 páginasEducacion EspecialEsteban CruzAinda não há avaliações
- Trabajo Semana 2Documento14 páginasTrabajo Semana 2Jose AlejoAinda não há avaliações
- Marco TeoricoDocumento6 páginasMarco TeoricoMontse CastellanosAinda não há avaliações
- Carol DuncanDocumento3 páginasCarol DuncanCreep02Ainda não há avaliações
- Lenguaje y SemióticaDocumento10 páginasLenguaje y SemióticakutosilvaAinda não há avaliações
- Teoria de BenchmarkingDocumento8 páginasTeoria de BenchmarkingValeria Fernanda Martínez villalobosAinda não há avaliações
- 5° CUADERNILLO (Segundo)Documento16 páginas5° CUADERNILLO (Segundo)Angélica SaucilloAinda não há avaliações
- LibroDocumento19 páginasLibrococoycowcoAinda não há avaliações
- DEVOCIONARIODocumento14 páginasDEVOCIONARIOKarol ArenasAinda não há avaliações
- Estaciones AgrometeorologicasDocumento34 páginasEstaciones AgrometeorologicasJavier Avila RodriguezAinda não há avaliações
- Textos de Rousseau 202021Documento2 páginasTextos de Rousseau 202021LLUNA FERNANDEZ ROJOAinda não há avaliações
- Malla Curricular D - 21 SetiembreDocumento27 páginasMalla Curricular D - 21 Setiembrealexander GAinda não há avaliações
- Tabla de Análisis y Contextualización de FuentesDocumento3 páginasTabla de Análisis y Contextualización de FuentesCamila Ramirez100% (1)
- Wilde, Eduardo - Tini Y Otros RelatosDocumento75 páginasWilde, Eduardo - Tini Y Otros RelatosDaniAinda não há avaliações
- Examen IsótoposDocumento1 páginaExamen IsótoposJose Luis Gallego GuisadoAinda não há avaliações
- Ma642 CuadernoDocumento289 páginasMa642 CuadernoRosmery Pardave HuertaAinda não há avaliações