Você também pode gostar
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsNo EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsAinda não há avaliações
- Section 6 Root Locus DesignDocumento98 páginasSection 6 Root Locus DesignNgô Minh KhánhAinda não há avaliações
- Section 3 Stability PDFDocumento44 páginasSection 3 Stability PDFyaswanth179Ainda não há avaliações
- Stability TheoryDocumento4 páginasStability TheorymrtearmakerAinda não há avaliações
- Section 7 Frequency Response AnalysisDocumento113 páginasSection 7 Frequency Response AnalysisNgô Minh KhánhAinda não há avaliações
- Submitted To:: Submitted ByDocumento7 páginasSubmitted To:: Submitted BySaid Khalid ShahAinda não há avaliações
- Section 9 Root-Locus DesignDocumento98 páginasSection 9 Root-Locus DesignJuan Pablo Luna ValdesAinda não há avaliações
- Steady-State Error For State-Space Models: OutlineDocumento6 páginasSteady-State Error For State-Space Models: OutlineyalllikAinda não há avaliações
- Part 7Documento18 páginasPart 7TwinkelsAinda não há avaliações
- Expt 7 Steady State Error - CAÑETEDocumento8 páginasExpt 7 Steady State Error - CAÑETEJHUSTINE CAÑETEAinda não há avaliações
- Steady State ErrorDocumento20 páginasSteady State ErrorHassan El SayedAinda não há avaliações
- Chapter 4-5Documento10 páginasChapter 4-5khin muyar ayeAinda não há avaliações
- Power System Analysis-Unit-3-Q-ADocumento3 páginasPower System Analysis-Unit-3-Q-Asulthan_81Ainda não há avaliações
- ELE302 NotesDocumento70 páginasELE302 NotesAnmol PanchalAinda não há avaliações
- Lecture 16, 17 Steady-State Error For Unity Feedback SystemDocumento29 páginasLecture 16, 17 Steady-State Error For Unity Feedback SystemHamza KhanAinda não há avaliações
- Analog Control System Performance 151Documento1 páginaAnalog Control System Performance 151flausenAinda não há avaliações
- Chapter 4Documento15 páginasChapter 4Elias KhouryAinda não há avaliações
- Steady-State Errors: (Textbook Chap. 7)Documento32 páginasSteady-State Errors: (Textbook Chap. 7)Sumeyye AstalAinda não há avaliações
- Unit-2 LINEAR APPLICATIONS OF IC OP-AMPS (Ficgure and Figure No Updated)Documento45 páginasUnit-2 LINEAR APPLICATIONS OF IC OP-AMPS (Ficgure and Figure No Updated)Arunkuma81Ainda não há avaliações
- Steady State Error Analysis With Unit Step and Ramp Input SignalDocumento15 páginasSteady State Error Analysis With Unit Step and Ramp Input SignalyasinAinda não há avaliações
- Lecture 15 Steady-State Error For Unity Feedback SystemDocumento28 páginasLecture 15 Steady-State Error For Unity Feedback SystemRammay Sb100% (1)
- Reality: Set 3 Introduction To Fault AnalysisDocumento13 páginasReality: Set 3 Introduction To Fault AnalysisAly AshrafAinda não há avaliações
- Aut Control-5-Steady-State-ErrorDocumento51 páginasAut Control-5-Steady-State-ErrorAlaa FaroukAinda não há avaliações
- Error Back Propagation AlgorithmDocumento14 páginasError Back Propagation Algorithmkaran26121989Ainda não há avaliações
- 01 - C1 Return Ratio & BlackmanDocumento18 páginas01 - C1 Return Ratio & BlackmanSravani UppalaAinda não há avaliações
- Appendix 2: System TroubleshootingDocumento4 páginasAppendix 2: System Troubleshootingعلاء صقرAinda não há avaliações
- Control Systems: Lect.7 Steady State ErrorDocumento44 páginasControl Systems: Lect.7 Steady State Errorkhaled jAinda não há avaliações
- Unsymmetrical FaultDocumento32 páginasUnsymmetrical FaultPramod PathadeAinda não há avaliações
- To Study Comparator: Ikjot Dhawan, 13 Btech ECE A Lovely Professional UniversityDocumento7 páginasTo Study Comparator: Ikjot Dhawan, 13 Btech ECE A Lovely Professional UniversityikjotdhawanAinda não há avaliações
- Spectre Tolerance SettingsDocumento49 páginasSpectre Tolerance SettingsLaxmeesha NaikAinda não há avaliações
- Military Institute of Science & Technology: Experiment No. 8Documento5 páginasMilitary Institute of Science & Technology: Experiment No. 8ramisa rizwanAinda não há avaliações
- Lecture 170122Documento58 páginasLecture 170122Divyansh SinghAinda não há avaliações
- Chapter 2 (Horenstein) : NEG Out POSDocumento32 páginasChapter 2 (Horenstein) : NEG Out POSMd Asadul HoqueAinda não há avaliações
- Section 2 Block Diagrams & Signal Flow GraphsDocumento62 páginasSection 2 Block Diagrams & Signal Flow GraphsAnushaChittiAinda não há avaliações
- Lecture 18 Static Error Constants and System TypeDocumento21 páginasLecture 18 Static Error Constants and System TypeHamza KhanAinda não há avaliações
- Set 3 Introduction To Fault AnalysisDocumento13 páginasSet 3 Introduction To Fault AnalysisRahamath Ali Mohammed AttarAinda não há avaliações
- Controltheory 07Documento7 páginasControltheory 07Hard LifeAinda não há avaliações
- Control Systems: Steady State ErrorDocumento44 páginasControl Systems: Steady State Errorpham tamAinda não há avaliações
- Machine Model REGC - BDocumento2 páginasMachine Model REGC - BManuelAinda não há avaliações
- Diffamp Differential Gain in Presence of Mismatches.Documento7 páginasDiffamp Differential Gain in Presence of Mismatches.HajimeAinda não há avaliações
- Steady State ErrorDocumento37 páginasSteady State ErrordeepthiAinda não há avaliações
- Littelfuse Ground Fault Protection Charging Current NGR Selection MonitoringDocumento75 páginasLittelfuse Ground Fault Protection Charging Current NGR Selection MonitoringAlmir GarciaAinda não há avaliações
- CS Ii MCQDocumento6 páginasCS Ii MCQSahim KokateAinda não há avaliações
- Analog Lecture 5 - CMSDocumento49 páginasAnalog Lecture 5 - CMSMayank SharmaAinda não há avaliações
- Lecture #2 RCDocumento36 páginasLecture #2 RCKiraAinda não há avaliações
- Chapter 7 Steady-State ErrorDocumento53 páginasChapter 7 Steady-State ErrorRakhmeen gulAinda não há avaliações
- 95 Development of The Non Ideal Op Amp EquationsDocumento12 páginas95 Development of The Non Ideal Op Amp EquationsJohnny DoeAinda não há avaliações
- Lect Op Amps2Documento37 páginasLect Op Amps2Ahmad Zarith HaiqalAinda não há avaliações
- Lec14 Op AmpsDocumento35 páginasLec14 Op AmpsVijay MythryAinda não há avaliações
- dsrsstmkndl6 1Documento8 páginasdsrsstmkndl6 1Yesi Indri HeryaniAinda não há avaliações
- M6Report Sapiandante 24Documento3 páginasM6Report Sapiandante 24Goran SapiandanteAinda não há avaliações
- 1SFC132071M0201 For CU 06.00.00Documento14 páginas1SFC132071M0201 For CU 06.00.00mecanuloAinda não há avaliações
- CH2 Basic Operational Amplifier Circuits With Real Impedances PDFDocumento51 páginasCH2 Basic Operational Amplifier Circuits With Real Impedances PDFZiad AlghamdiAinda não há avaliações
- Steady State ErrorsDocumento31 páginasSteady State Errorssasdfsfa100% (1)
- 268 - Non-Linear Systems by K. C. Bhuyan PDFDocumento35 páginas268 - Non-Linear Systems by K. C. Bhuyan PDFManika SahaAinda não há avaliações
- 268 - Non-Linear Systems by K. C. Bhuyan PDFDocumento35 páginas268 - Non-Linear Systems by K. C. Bhuyan PDFMeenakshi VenkataramanAinda não há avaliações
- CH 2 Operational Amplifiers 2022Documento88 páginasCH 2 Operational Amplifiers 2022鄭又嘉Ainda não há avaliações
- Bangladesh University of Engineering and TechnologyDocumento10 páginasBangladesh University of Engineering and Technologyabbas uddinAinda não há avaliações
- Finite State MachinesDocumento17 páginasFinite State Machineslashali1212Ainda não há avaliações
- A Sample of Coal From The Mine Is Found To ContainDocumento1 páginaA Sample of Coal From The Mine Is Found To Containprabhat chauhanAinda não há avaliações
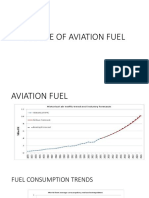
- AviationDocumento10 páginasAviationprabhat chauhanAinda não há avaliações
- Market RefineryDocumento43 páginasMarket Refineryprabhat chauhanAinda não há avaliações
- Future of Aviation FuelDocumento10 páginasFuture of Aviation Fuelprabhat chauhanAinda não há avaliações
- NBCC 2015 Seismic Design Examples in S-FRAME AnalysisDocumento91 páginasNBCC 2015 Seismic Design Examples in S-FRAME AnalysisMike Smith100% (1)
- Stamp 07 eDocumento6 páginasStamp 07 eDumitru TuiAinda não há avaliações
- Science: BiologyDocumento22 páginasScience: BiologyMike RollideAinda não há avaliações
- State of The Art in Research On MicrogridsDocumento36 páginasState of The Art in Research On MicrogridsDulal MannaAinda não há avaliações
- Cisco Nexus 7000 Introduction To NX-OS Lab GuideDocumento38 páginasCisco Nexus 7000 Introduction To NX-OS Lab Guiderazzzzzzzzzzz100% (1)
- Ninja 5e v1 5Documento8 páginasNinja 5e v1 5Jeferson Moreira100% (2)
- TheBigBookOfTeamCulture PDFDocumento231 páginasTheBigBookOfTeamCulture PDFavarus100% (1)
- Atlantis Implant Compatibility Chart 79214-US-1107Documento2 páginasAtlantis Implant Compatibility Chart 79214-US-1107Jean-Christophe PopeAinda não há avaliações
- Final ExamDocumento2 páginasFinal ExamblacmsAinda não há avaliações
- Pemisah ZirconDocumento10 páginasPemisah ZirconLorie Banka100% (1)
- Contents of HvacDocumento2 páginasContents of Hvaclijo johnAinda não há avaliações
- 8 TH Linear Equations DBDocumento1 página8 TH Linear Equations DBParth GoyalAinda não há avaliações
- High School Department PAASCU Accredited Academic Year 2017 - 2018Documento6 páginasHigh School Department PAASCU Accredited Academic Year 2017 - 2018Kevin T. OnaroAinda não há avaliações
- Algorithm Design: Figure 1. Architecture Diagram For Greykite Library's Main Forecasting Algorithm, SilverkiteDocumento3 páginasAlgorithm Design: Figure 1. Architecture Diagram For Greykite Library's Main Forecasting Algorithm, Silverkitesiper34606Ainda não há avaliações
- Beyond The Breech Trial. Maggie BanksDocumento4 páginasBeyond The Breech Trial. Maggie Bankspurpleanvil100% (2)
- TuberkulosisDocumento285 páginasTuberkulosisTeuku M. FebriansyahAinda não há avaliações
- IO5 Future Skills Foresight 2030 ReportDocumento96 páginasIO5 Future Skills Foresight 2030 ReportjuliavalleAinda não há avaliações
- 56257375851Documento3 páginas56257375851Anneliese FernandesAinda não há avaliações
- Asian RegionalismDocumento15 páginasAsian RegionalismLiezel AalaAinda não há avaliações
- Valuing Construction Variation by Using PWA, FIDIC, ICWMF and CEDA Fluctuation Formula MechanismDocumento5 páginasValuing Construction Variation by Using PWA, FIDIC, ICWMF and CEDA Fluctuation Formula MechanismAzman YahayaAinda não há avaliações
- Christine Remembered That Today Is The Birthday of Her BossDocumento1 páginaChristine Remembered That Today Is The Birthday of Her BossA.Ainda não há avaliações
- Manual CAT 345C LDocumento20 páginasManual CAT 345C LRicardo SotoAinda não há avaliações
- Solution Manual-Statistical Physics of Particles by Meheran KardarDocumento165 páginasSolution Manual-Statistical Physics of Particles by Meheran KardarDanielle Nguyen7% (14)
- Cyanocobalamin Injection Clinical Pharmacology Drug MonographDocumento36 páginasCyanocobalamin Injection Clinical Pharmacology Drug MonographLaureyAinda não há avaliações
- Orange County Sheriff's Office SeaWorld Death Investigative ReportDocumento43 páginasOrange County Sheriff's Office SeaWorld Death Investigative ReportWESH2News100% (1)
- KRPL Shahjahanpur Check List For Arc Welding MachineDocumento1 páginaKRPL Shahjahanpur Check List For Arc Welding MachineA S YadavAinda não há avaliações
- VRF-SLB013-EN - 0805115 - Catalogo Ingles 2015 PDFDocumento50 páginasVRF-SLB013-EN - 0805115 - Catalogo Ingles 2015 PDFJhon Lewis PinoAinda não há avaliações
- 02-Fundamentals of Engineering EconomyDocumento14 páginas02-Fundamentals of Engineering EconomyLin Xian XingAinda não há avaliações
- Store Docket - Wood PeckerDocumento89 páginasStore Docket - Wood PeckerRakesh KumarAinda não há avaliações
- Turning The Mind Into An AllyDocumento244 páginasTurning The Mind Into An AllyNic Sosa67% (3)