Você também pode gostar
- FEM Solved ExampleDocumento3 páginasFEM Solved ExampleMian AsimAinda não há avaliações
- C1 Classwork RubricsDocumento1 páginaC1 Classwork RubricsMian AsimAinda não há avaliações
- Research Center For Modeling & Simulation (RCMS) National University of Sciences & TechnologyDocumento2 páginasResearch Center For Modeling & Simulation (RCMS) National University of Sciences & TechnologyMian AsimAinda não há avaliações
- Form For Collection of Prime Minister ChequeDocumento1 páginaForm For Collection of Prime Minister ChequeMian AsimAinda não há avaliações
- 10 5923 J Edu 20180803 02Documento6 páginas10 5923 J Edu 20180803 02Mian AsimAinda não há avaliações
- Analysis of Fatigue Failure in The Rolling BearingsDocumento5 páginasAnalysis of Fatigue Failure in The Rolling BearingsMian AsimAinda não há avaliações
- FEM Definition & StepsDocumento1 páginaFEM Definition & StepsMian AsimAinda não há avaliações
- 5.2.1assessment - Rubrics PDFDocumento1 página5.2.1assessment - Rubrics PDFMian AsimAinda não há avaliações
- Types and Features of Rolling Bearings PDFDocumento6 páginasTypes and Features of Rolling Bearings PDFMian AsimAinda não há avaliações
- Computational Fluid Dynamics Simulation and Geometric Design of Hydraulic Turbine Draft TubeDocumento11 páginasComputational Fluid Dynamics Simulation and Geometric Design of Hydraulic Turbine Draft TubeMian AsimAinda não há avaliações
- 2510-Article Text-6054-1-10-20151009Documento9 páginas2510-Article Text-6054-1-10-20151009SOURAVAinda não há avaliações
- Force and Displacement Measurement PDFDocumento35 páginasForce and Displacement Measurement PDFMian AsimAinda não há avaliações
- Fatigue Consideration in DesignDocumento9 páginasFatigue Consideration in DesignJitendra SoniAinda não há avaliações
- Fatigue Analysis Under Given Loading Conditions Using FEADocumento22 páginasFatigue Analysis Under Given Loading Conditions Using FEAMian AsimAinda não há avaliações
- Dynamics NotesDocumento126 páginasDynamics NotesChitrang BohraAinda não há avaliações
- Even More MatLab, & Forward and Inverse Kinematics PDFDocumento36 páginasEven More MatLab, & Forward and Inverse Kinematics PDFMian AsimAinda não há avaliações
- DS DuraForm PA US PDFDocumento2 páginasDS DuraForm PA US PDFMian AsimAinda não há avaliações
- Ex 10 9Documento1 páginaEx 10 9Mian AsimAinda não há avaliações
- Development of SurfacesDocumento8 páginasDevelopment of SurfacesBhuban LimbuAinda não há avaliações
- Assignment 2Documento7 páginasAssignment 2Mian AsimAinda não há avaliações
- A CFD Analysis of Centrifugal PumpDocumento5 páginasA CFD Analysis of Centrifugal PumpMian AsimAinda não há avaliações
- Pb.9-86 MATLAB Prog PDFDocumento1 páginaPb.9-86 MATLAB Prog PDFMian AsimAinda não há avaliações
- Formatting Page No Sms WordDocumento2 páginasFormatting Page No Sms WordAli AkbarAinda não há avaliações
- PB 9-27Documento1 páginaPB 9-27Mian AsimAinda não há avaliações
- PB 9-27Documento1 páginaPB 9-27Mian AsimAinda não há avaliações
- Finding Drag, Lift Coefficients and Velocity Profile Using ANSYS - FluentDocumento35 páginasFinding Drag, Lift Coefficients and Velocity Profile Using ANSYS - FluentMian AsimAinda não há avaliações
- Ex 10 9Documento1 páginaEx 10 9Mian AsimAinda não há avaliações
- Yang2018 - Article - AWeldingQualityDetectionMethodDocumento12 páginasYang2018 - Article - AWeldingQualityDetectionMethodMian AsimAinda não há avaliações
- Yang2018 - Article - AWeldingQualityDetectionMethodDocumento12 páginasYang2018 - Article - AWeldingQualityDetectionMethodMian AsimAinda não há avaliações
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (894)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (399)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (119)
- Conceptual Questions: Problem Set 1: Electric Forces and FieldsDocumento5 páginasConceptual Questions: Problem Set 1: Electric Forces and FieldsretterateAinda não há avaliações
- PGX2 IngDocumento5 páginasPGX2 IngpiabAinda não há avaliações
- Sergio M. Rezende - Introduction To Electronic Materials and Devices-Springer (2022)Documento517 páginasSergio M. Rezende - Introduction To Electronic Materials and Devices-Springer (2022)Thiago GuerraAinda não há avaliações
- K193 - Smart SLA Battery ChargerDocumento3 páginasK193 - Smart SLA Battery ChargerdewasuryantoAinda não há avaliações
- Top Module / Module DPLL (SignalIn, SignalOutDocumento10 páginasTop Module / Module DPLL (SignalIn, SignalOutbigjimmAinda não há avaliações
- 7483 - 4 Bit Adder PDFDocumento5 páginas7483 - 4 Bit Adder PDFSurapaneni Varun KarthikAinda não há avaliações
- Sanction Letter 49366481Documento3 páginasSanction Letter 49366481Dr. Shashank RkAinda não há avaliações
- Philips fx70-55, x78 Ver.2.0 SMDocumento48 páginasPhilips fx70-55, x78 Ver.2.0 SMOrlando SilvaAinda não há avaliações
- اعطال الموتوراتDocumento65 páginasاعطال الموتوراتmoathAinda não há avaliações
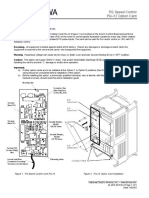
- AX SERIES LIFT CONTROL CARDS USER MANUALDocumento14 páginasAX SERIES LIFT CONTROL CARDS USER MANUALSuleman Amjad75% (4)
- Zener Diode CharaDocumento12 páginasZener Diode Charaaleena s lAinda não há avaliações
- AP3064Documento13 páginasAP3064José CalzadillaAinda não há avaliações
- Basic Electrical Circuits Tutorial (3 PhaseDocumento2 páginasBasic Electrical Circuits Tutorial (3 PhaseRahul KumarAinda não há avaliações
- Sevadis Autel MaxiChargerDocumento2 páginasSevadis Autel MaxiChargerwmcAinda não há avaliações
- Electric Charges and FieldsDocumento2 páginasElectric Charges and Fieldsವಿಭಾಸ್ ಪ್ರಕಾಶ್100% (1)
- Shift Registers - 74HC595 & 74HC165 With ArduinoDocumento26 páginasShift Registers - 74HC595 & 74HC165 With Arduinochafic WEISSAinda não há avaliações
- Chapter 8 - ElectricityDocumento55 páginasChapter 8 - ElectricityJason Kean SengAinda não há avaliações
- Shure fp42Documento20 páginasShure fp42Denis ZhuravelAinda não há avaliações
- ProjectDocumento31 páginasProjectMR. CØØLAinda não há avaliações
- 55 - B - 5 - Physics For VI CandidatesDocumento27 páginas55 - B - 5 - Physics For VI CandidatesOm TripathiAinda não há avaliações
- LEDs Student HandoutDocumento32 páginasLEDs Student HandoutercanAinda não há avaliações
- Corrosion Rate MeasurementsDocumento27 páginasCorrosion Rate MeasurementsedwinAinda não há avaliações
- HVAC Start-Up Checklist EssentialsDocumento3 páginasHVAC Start-Up Checklist EssentialsNorman CanlasAinda não há avaliações
- General Notes & Specification Legend: Cad Designer: Checked By: Sheet ContentDocumento1 páginaGeneral Notes & Specification Legend: Cad Designer: Checked By: Sheet ContentMichelle LabianoAinda não há avaliações
- Emf of CellDocumento17 páginasEmf of CellAnubhab Das100% (1)
- Motor Fault Simulator L Low Voltage Fault Simulation Trainer (XPO - MFS)Documento1 páginaMotor Fault Simulator L Low Voltage Fault Simulation Trainer (XPO - MFS)Carbon Nano TubeAinda não há avaliações
- Rectron Semiconductor Mini Bridge Rectifier Technical SpecificationDocumento2 páginasRectron Semiconductor Mini Bridge Rectifier Technical SpecificationMubashirriskAinda não há avaliações
- Electrical System Design GuidelinesDocumento125 páginasElectrical System Design Guidelinescarlosmarciosfreitas100% (1)
- Imanes PDFDocumento70 páginasImanes PDFPablo TorresiAinda não há avaliações
- Section 13 BASIC PUMP SIZING FOR ESPDocumento69 páginasSection 13 BASIC PUMP SIZING FOR ESPYassin MuhssenAinda não há avaliações