Você também pode gostar
- Guia de Entrenamiento Bently NevadaDocumento15 páginasGuia de Entrenamiento Bently NevadaJaime Eduardo Bolaños Raad83% (6)
- Preguntas de Arquitectura de ComputadorasDocumento19 páginasPreguntas de Arquitectura de ComputadorasEustacio Iturbide0% (1)
- M1003-7-MC-001 - 0 - Memoria de Cálculo AlimentadoresDocumento16 páginasM1003-7-MC-001 - 0 - Memoria de Cálculo AlimentadoresJuan Carlos Briega AstorgaAinda não há avaliações
- Evidencia de La Reunion y Coordinacion Del Proyecto Dulce Dar TerminadoDocumento1 páginaEvidencia de La Reunion y Coordinacion Del Proyecto Dulce Dar TerminadoMarkoo PoloAinda não há avaliações
- Polo Zapata Marco Antonio Examen T1Documento4 páginasPolo Zapata Marco Antonio Examen T1Markoo PoloAinda não há avaliações
- Empleabilidad Semana 12Documento22 páginasEmpleabilidad Semana 12Markoo PoloAinda não há avaliações
- Ejercicios de IGV Basicos Desarrollados en ClaseDocumento6 páginasEjercicios de IGV Basicos Desarrollados en ClaseMarkoo PoloAinda não há avaliações
- Semana 4 Clase 9041 Polo ZapataDocumento5 páginasSemana 4 Clase 9041 Polo ZapataMarkoo PoloAinda não há avaliações
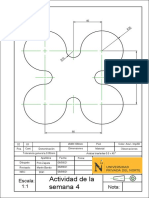
- Marco Polo Dibujo TecnicoDocumento6 páginasMarco Polo Dibujo TecnicoMarkoo PoloAinda não há avaliações
- Caso de EstudioDocumento4 páginasCaso de EstudioMarkoo PoloAinda não há avaliações
- TPCC - T1 - COMMA - Ing. - CovidDocumento4 páginasTPCC - T1 - COMMA - Ing. - CovidMarkoo PoloAinda não há avaliações
- Funcion ConsumoDocumento9 páginasFuncion ConsumoMarkoo PoloAinda não há avaliações
- Comma Ing - 2375 - TRP1 - 4Documento5 páginasComma Ing - 2375 - TRP1 - 4Markoo PoloAinda não há avaliações
- Clase de Estadistica de Adelanto Verano 2021-3era ProbabilidadesDocumento3 páginasClase de Estadistica de Adelanto Verano 2021-3era ProbabilidadesMarkoo PoloAinda não há avaliações
- T.Campo 5Documento2 páginasT.Campo 5Markoo PoloAinda não há avaliações
- PASITO de Estadistica NK TeslaDocumento1 páginaPASITO de Estadistica NK TeslaMarkoo Polo0% (1)
- Clase Modelo Verano 2021Documento2 páginasClase Modelo Verano 2021Markoo PoloAinda não há avaliações
- Registro Del Segundo Bimestre Del Colegio Cantor Prof Marco PoloDocumento33 páginasRegistro Del Segundo Bimestre Del Colegio Cantor Prof Marco PoloMarkoo PoloAinda não há avaliações
- Ejemplo de Maniobras de Restablecimiento y de Libranza Realizados Por Un Operador de Un Sistema Eléctrico de PotenciaDocumento74 páginasEjemplo de Maniobras de Restablecimiento y de Libranza Realizados Por Un Operador de Un Sistema Eléctrico de PotenciaJuanDelÁngelHernandezAinda não há avaliações
- Transformador de Potencia TrifásicoDocumento1 páginaTransformador de Potencia TrifásicoJulioHuangaR100% (1)
- Propiedades Electricas, Magneticas y Termicas Ciencia e Ingenieria de Los MaterialesDocumento9 páginasPropiedades Electricas, Magneticas y Termicas Ciencia e Ingenieria de Los MaterialesHector Ivan Miranda MontoyaAinda não há avaliações
- Paneles Fotovoltaicos y Producción de Corriente EléctricaDocumento10 páginasPaneles Fotovoltaicos y Producción de Corriente EléctricasaraAinda não há avaliações
- Normatividad para Pruebas de Megger y de Rigidez DieléctricasDocumento7 páginasNormatividad para Pruebas de Megger y de Rigidez DieléctricasEdison ChicaizaAinda não há avaliações
- Circuito OscilanteDocumento16 páginasCircuito OscilanteAlberto Garcia SanchezAinda não há avaliações
- Catalogo HPDocumento4 páginasCatalogo HPMarco Antonio ChávarriAinda não há avaliações
- Ee-111 Analisis de Circuitos Electricos I PDFDocumento4 páginasEe-111 Analisis de Circuitos Electricos I PDFAngel NavarroAinda não há avaliações
- Laboratorio 06 - Reed Switch - PotenciometricoDocumento14 páginasLaboratorio 06 - Reed Switch - PotenciometricoJuam YupanquiAinda não há avaliações
- Protocolo de Pruebas LjadDocumento21 páginasProtocolo de Pruebas LjadSonia Mayerly Delgado BuitragoAinda não há avaliações
- Instalaciones ElectricasDocumento2 páginasInstalaciones ElectricasMarco Antonio Delgado VasquezAinda não há avaliações
- Practica 10Documento17 páginasPractica 10Vanessa Adalahi Camarillo CasanovaAinda não há avaliações
- 20170508220547Documento2 páginas20170508220547Luis Alberto Asencio ReyesAinda não há avaliações
- Fallos en Los Actuadores de Un VehículoDocumento4 páginasFallos en Los Actuadores de Un Vehículoruiz frank rodriguez herreraAinda não há avaliações
- GuiaCHIRP1 0 PDFDocumento8 páginasGuiaCHIRP1 0 PDFCarlos RománAinda não há avaliações
- Frank Cardenas JulioDocumento1 páginaFrank Cardenas Juliofrank cardenasAinda não há avaliações
- Laboratorio - 2 - Líneas de Transmisión y Antenas 202108Documento3 páginasLaboratorio - 2 - Líneas de Transmisión y Antenas 202108Alex AtencioAinda não há avaliações
- Practica 5Documento20 páginasPractica 5Jimena Pérez PiñaAinda não há avaliações
- Landis Gyr Zmg-Guia de UsoDocumento2 páginasLandis Gyr Zmg-Guia de UsoBartolomé Carlos Orfila NadalAinda não há avaliações
- 230 V1a Ev00 00747 PDFDocumento246 páginas230 V1a Ev00 00747 PDFJuan Luchox AhumadaAinda não há avaliações
- HT-5-2S-2018-CircuitosCC y RCDocumento2 páginasHT-5-2S-2018-CircuitosCC y RCDrito GarciaAinda não há avaliações
- Te01 - Fundamentos de La MecatrónicaDocumento3 páginasTe01 - Fundamentos de La Mecatrónicacolapse teiwinAinda não há avaliações
- Listado de Materiales Esquema Min Cerro Toribio 29-09-2021Documento10 páginasListado de Materiales Esquema Min Cerro Toribio 29-09-2021Franklin Alarcon100% (1)
- HT - Talrob - Semana 01Documento3 páginasHT - Talrob - Semana 01lesly chAinda não há avaliações
- Actividad #05. - Circuitos Corriente ContinuaDocumento7 páginasActividad #05. - Circuitos Corriente ContinuaMelany Geraldine PecheAinda não há avaliações