Você também pode gostar
- Automatic Brake Failure IndicatorDocumento1 páginaAutomatic Brake Failure Indicatorbalabooks100% (1)
- Presentation On: Design and Development of Sugarecane Bud Cutting Machine Guided By-Dr. S.S.KULKARNIDocumento16 páginasPresentation On: Design and Development of Sugarecane Bud Cutting Machine Guided By-Dr. S.S.KULKARNIVenAinda não há avaliações
- Accident Alert in Modern Traffic System With CameraDocumento12 páginasAccident Alert in Modern Traffic System With CameraLeander Lawrence100% (1)
- Over Speed Fuel CutoffDocumento3 páginasOver Speed Fuel Cutoffselvaganapathy1992Ainda não há avaliações
- Sand Slinger MC Pneumatic 2016 VeltechDocumento47 páginasSand Slinger MC Pneumatic 2016 VeltechChockalingam AthilingamAinda não há avaliações
- Coin Based Water Controlling SystemDocumento34 páginasCoin Based Water Controlling SystemSanthosh Guduru75% (4)
- Weather Monitoring RoverDocumento76 páginasWeather Monitoring RoverabhinayAinda não há avaliações
- Project InverterDocumento67 páginasProject InverterKeshavGargAinda não há avaliações
- Device Load Monitor With Programmable Meter For Energy AuditDocumento3 páginasDevice Load Monitor With Programmable Meter For Energy AuditMandeep G KashyapAinda não há avaliações
- 10.agriculture Field Motor Control System Using GSMDocumento64 páginas10.agriculture Field Motor Control System Using GSManil kumarAinda não há avaliações
- Android Based Bluetooth Door Lock Using Arduino PDF Documentation PDFDocumento1 páginaAndroid Based Bluetooth Door Lock Using Arduino PDF Documentation PDFRendel NalanganAinda não há avaliações
- Controlling of AC Lamp Dimmer Through Mobile Phone: FeaturesDocumento2 páginasControlling of AC Lamp Dimmer Through Mobile Phone: FeaturesHari KishorAinda não há avaliações
- Portable Mobile ChargerDocumento11 páginasPortable Mobile ChargerAbirami Mani57% (7)
- Design and Construction of Earth Fault Relay For Single Phase SystemDocumento3 páginasDesign and Construction of Earth Fault Relay For Single Phase SystemGururaj BandaAinda não há avaliações
- Brake Failure IndicatorDocumento28 páginasBrake Failure Indicatorrishika71% (7)
- Voice Controlled Vehicle For Physically Disabled Person: Presentation OnDocumento15 páginasVoice Controlled Vehicle For Physically Disabled Person: Presentation OnPooja GAinda não há avaliações
- Pen PlotterDocumento24 páginasPen PlotterMridul SethiAinda não há avaliações
- PLC Based Industrial Sorting Thesis ReportDocumento63 páginasPLC Based Industrial Sorting Thesis ReportVishal MeghwarAinda não há avaliações
- On "GSM BASED E-NOTICE BOARD"Documento28 páginasOn "GSM BASED E-NOTICE BOARD"Rahul Garg75% (4)
- Final Project Report of LabDocumento7 páginasFinal Project Report of LabDuniya AAinda não há avaliações
- Nerve Sensitivity Alert System For Comatose Patients: Submitted byDocumento83 páginasNerve Sensitivity Alert System For Comatose Patients: Submitted byGaurav SinghAinda não há avaliações
- Security Lock ProjectDocumento13 páginasSecurity Lock Projecttaha199Ainda não há avaliações
- Automatic Paper Cutting Using Geneva MechanismDocumento4 páginasAutomatic Paper Cutting Using Geneva MechanismsankaramarayananAinda não há avaliações
- Bicmos TechnologyDocumento37 páginasBicmos TechnologyPriya SinghAinda não há avaliações
- Accident Prevention Road Safety Modal With Speed Breaker Power GeneratorDocumento13 páginasAccident Prevention Road Safety Modal With Speed Breaker Power GeneratorRudrani WalekarAinda não há avaliações
- Aircraft Hybrid Electric Aircraft MotorsDocumento5 páginasAircraft Hybrid Electric Aircraft MotorsAdis Har-yo CahyonoAinda não há avaliações
- Automated IrrigationDocumento12 páginasAutomated IrrigationKarthik RaitaniAinda não há avaliações
- Underground Cable Fault Detection Using ZigbeeDocumento36 páginasUnderground Cable Fault Detection Using ZigbeeRana AbrarAinda não há avaliações
- Smart TrolleyDocumento24 páginasSmart TrolleyAbdul Razzak100% (1)
- An IoT Based School Zone Vehicle Monitoring System With Automatic Vehicle Speed Control and Alert SystemDocumento17 páginasAn IoT Based School Zone Vehicle Monitoring System With Automatic Vehicle Speed Control and Alert SystemM NAVYAAinda não há avaliações
- Welding Station Monitoring System Using Internet of Thing (Iot)Documento12 páginasWelding Station Monitoring System Using Internet of Thing (Iot)Paras GuptaAinda não há avaliações
- Underwater Communication Using LI-FI Technology: Names of The Students 2. Aviraj Shejawal 3. Dharyashil WaghchaureDocumento19 páginasUnderwater Communication Using LI-FI Technology: Names of The Students 2. Aviraj Shejawal 3. Dharyashil WaghchaureSudarshan RautAinda não há avaliações
- Automatic Railway Gate Controller DocumentationDocumento53 páginasAutomatic Railway Gate Controller Documentationmnair201167% (3)
- Obstacle Avoiding Robot Ppt-2Documento24 páginasObstacle Avoiding Robot Ppt-2Faizan MansoorAinda não há avaliações
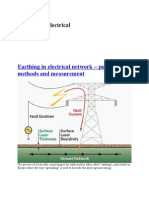
- Earthing in Electrical Network - Purpose, Methods and MeasurementDocumento12 páginasEarthing in Electrical Network - Purpose, Methods and MeasurementShah JayAinda não há avaliações
- Password Based Circuit BreakerDocumento8 páginasPassword Based Circuit BreakerRakshitha kAinda não há avaliações
- Automatic Railway Gate Control SystemDocumento26 páginasAutomatic Railway Gate Control Systemprakhar agarwalAinda não há avaliações
- Celluon Evo MouseDocumento30 páginasCelluon Evo MouseSaitejaTallapelly67% (3)
- Dual Axis Solar System ReportDocumento28 páginasDual Axis Solar System ReportdnyandevAinda não há avaliações
- Smart Road Safety and Vehicle Accident Prevention System For Mountain RoadsDocumento3 páginasSmart Road Safety and Vehicle Accident Prevention System For Mountain RoadsIsraelPerezSanchezAinda não há avaliações
- PLC Railways Accident Avoiding SystemDocumento4 páginasPLC Railways Accident Avoiding SystemNivedhan Gandhi100% (2)
- Automatic Railway Gate ControlDocumento22 páginasAutomatic Railway Gate ControlsriramAinda não há avaliações
- Voice Controlled Robot Car Usingarduino WithvariablespeedDocumento6 páginasVoice Controlled Robot Car Usingarduino WithvariablespeedVIVA-TECH IJRIAinda não há avaliações
- A Micro-Project Report On ": Metal Detector Circuit"Documento34 páginasA Micro-Project Report On ": Metal Detector Circuit"Om PawarAinda não há avaliações
- PLC Based Home Automation PDFDocumento95 páginasPLC Based Home Automation PDFRameshwar TalwarAinda não há avaliações
- Major Project Shopping TrolleyDocumento50 páginasMajor Project Shopping TrolleyRohith SharmaAinda não há avaliações
- Automatic Traffic Light Control UsingDocumento35 páginasAutomatic Traffic Light Control UsingDilyalew DebreworkAinda não há avaliações
- A Remote Control Based Home Appliances 2Documento31 páginasA Remote Control Based Home Appliances 2muhammad umarAinda não há avaliações
- Automatic Shoe PolishDocumento21 páginasAutomatic Shoe PolishDebashishParida100% (2)
- Pipe Climbing RobotDocumento3 páginasPipe Climbing RobotMectrosoft Creative technologyAinda não há avaliações
- A ProjectDocumento9 páginasA Projectjnanesh tk100% (1)
- Paper Counting Machine Project Report.Documento40 páginasPaper Counting Machine Project Report.josephfelix100% (2)
- Hand Gesture Controlled Robot.Documento70 páginasHand Gesture Controlled Robot.Aditya SharmaAinda não há avaliações
- Fingerprint Based Exam Hall Authentication SystemDocumento1 páginaFingerprint Based Exam Hall Authentication SystemVaibhav SinglaAinda não há avaliações
- Final Mini Project ReportDocumento29 páginasFinal Mini Project ReportumaAinda não há avaliações
- 8 Vehicle (1) DocumentationDocumento41 páginas8 Vehicle (1) DocumentationrebbalavivekAinda não há avaliações
- Car ParkingDocumento30 páginasCar ParkingDHINESH ITAinda não há avaliações
- Automatic Car Parking System: A Mini Project Report Submitted byDocumento24 páginasAutomatic Car Parking System: A Mini Project Report Submitted bythasarathanr1993_939Ainda não há avaliações
- Paper By:: Thunuguntla Gayathri Vusthepalli SravaniDocumento7 páginasPaper By:: Thunuguntla Gayathri Vusthepalli SravaniNaga Neelima ThunuguntlaAinda não há avaliações
- Fully Automated Toll Tax Collection Using RF TechnologyDocumento6 páginasFully Automated Toll Tax Collection Using RF Technologyaagrawal_48Ainda não há avaliações
- Prevalence of Peptic Ulcer in Patients Attending Kampala International University Teaching Hospital in Ishaka Bushenyi Municipality, UgandaDocumento10 páginasPrevalence of Peptic Ulcer in Patients Attending Kampala International University Teaching Hospital in Ishaka Bushenyi Municipality, UgandaKIU PUBLICATION AND EXTENSIONAinda não há avaliações
- August 2015Documento96 páginasAugust 2015Cleaner MagazineAinda não há avaliações
- Tate Modern London, Pay Congestion ChargeDocumento6 páginasTate Modern London, Pay Congestion ChargeCongestionChargeAinda não há avaliações
- Majalah Remaja Islam Drise #09 by Majalah Drise - Issuu PDFDocumento1 páginaMajalah Remaja Islam Drise #09 by Majalah Drise - Issuu PDFBalqis Ar-Rubayyi' Binti HasanAinda não há avaliações
- ArpitResumeISM PDFDocumento1 páginaArpitResumeISM PDFchethan rAinda não há avaliações
- Icom IC F5021 F6021 ManualDocumento24 páginasIcom IC F5021 F6021 ManualAyam ZebossAinda não há avaliações
- EASY DMS ConfigurationDocumento6 páginasEASY DMS ConfigurationRahul KumarAinda não há avaliações
- Kayako Support Suite User Manual PDFDocumento517 páginasKayako Support Suite User Manual PDFallQoo SEO BaiduAinda não há avaliações
- Random Variable N N Mean or Expected Value: Number of Ducks Type of Duck AmountDocumento2 páginasRandom Variable N N Mean or Expected Value: Number of Ducks Type of Duck AmountAngie PastorAinda não há avaliações
- VISCOROL Series - Magnetic Level Indicators: DescriptionDocumento4 páginasVISCOROL Series - Magnetic Level Indicators: DescriptionRaduAinda não há avaliações
- Data Book: Automotive TechnicalDocumento1 páginaData Book: Automotive TechnicalDima DovgheiAinda não há avaliações
- Dreamweaver Lure v. Heyne - ComplaintDocumento27 páginasDreamweaver Lure v. Heyne - ComplaintSarah BursteinAinda não há avaliações
- Aman 5Documento1 páginaAman 5HamidAinda não há avaliações
- Concrete For Water StructureDocumento22 páginasConcrete For Water StructureIntan MadiaaAinda não há avaliações
- Rs 422Documento1 páginaRs 422rezakaihaniAinda não há avaliações
- Methods of Teaching Syllabus - FinalDocumento6 páginasMethods of Teaching Syllabus - FinalVanessa L. VinluanAinda não há avaliações
- PPB 3193 Operation Management - Group 10Documento11 páginasPPB 3193 Operation Management - Group 10树荫世界Ainda não há avaliações
- Numerical Transformer Differential RelayDocumento2 páginasNumerical Transformer Differential RelayTariq Mohammed OmarAinda não há avaliações
- Fr-E700 Instruction Manual (Basic)Documento155 páginasFr-E700 Instruction Manual (Basic)DeTiEnamoradoAinda não há avaliações
- 1980WB58Documento167 páginas1980WB58AKSAinda não há avaliações
- Petitioner's Response To Show CauseDocumento95 páginasPetitioner's Response To Show CauseNeil GillespieAinda não há avaliações
- Quantum Hopfield NetworksDocumento83 páginasQuantum Hopfield NetworksSiddharth SharmaAinda não há avaliações
- Creative Thinking (2) : Dr. Sarah Elsayed ElshazlyDocumento38 páginasCreative Thinking (2) : Dr. Sarah Elsayed ElshazlyNehal AbdellatifAinda não há avaliações
- Bisleri 2.0Documento59 páginasBisleri 2.0Dr Amit Rangnekar100% (4)
- Indictment - 17-Cr-00601-EnV Doc 1 Indictment 11-1-17Documento6 páginasIndictment - 17-Cr-00601-EnV Doc 1 Indictment 11-1-17C BealeAinda não há avaliações
- Entrep Q4 - Module 7Documento5 páginasEntrep Q4 - Module 7Paula DT PelitoAinda não há avaliações
- CBC Building Wiring Installation NC IIDocumento72 páginasCBC Building Wiring Installation NC IIFaysbuk KotoAinda não há avaliações
- A Religious LeadershipDocumento232 páginasA Religious LeadershipBonganiAinda não há avaliações
- MEMORANDUMDocumento8 páginasMEMORANDUMAdee JocsonAinda não há avaliações