Você também pode gostar
- Animatronics SeminarDocumento32 páginasAnimatronics SeminarThockanattu Varkey Mathew86% (14)
- AnimatronicsDocumento22 páginasAnimatronicsRanjith Kumar100% (1)
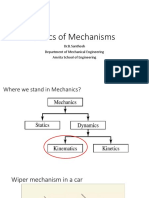
- Basics of Mechanisms: Dr.B.Santhosh Department of Mechanical Engineering Amrita School of EngineeringDocumento34 páginasBasics of Mechanisms: Dr.B.Santhosh Department of Mechanical Engineering Amrita School of Engineeringkishore sAinda não há avaliações
- Animatronics Technical Seminar Report by Aswin SarangDocumento20 páginasAnimatronics Technical Seminar Report by Aswin SarangAswin Sarang100% (2)
- Electronics Meet Animal BrainsDocumento44 páginasElectronics Meet Animal BrainssherrysherryAinda não há avaliações
- Animatronics: Hamza Najmuddin Bs Civil Technology 3 SemesterDocumento19 páginasAnimatronics: Hamza Najmuddin Bs Civil Technology 3 SemesterhamzaAinda não há avaliações
- Strahlenfolter - Electronic Harassment - Neural Implants - Past, Present & Future PART1Documento11 páginasStrahlenfolter - Electronic Harassment - Neural Implants - Past, Present & Future PART1nwo-mengele-doctorsAinda não há avaliações
- Voltage MultiplierDocumento15 páginasVoltage MultiplierMohd Shafie Awang100% (1)
- Animatronics ContentDocumento40 páginasAnimatronics ContentMerin Thomas67% (3)
- Hillel Shabbat Comes To 28 North College: Alpha Epsilon Pi Fraternity Omicron Upsilon ChapterDocumento4 páginasHillel Shabbat Comes To 28 North College: Alpha Epsilon Pi Fraternity Omicron Upsilon Chapterapi-216308576Ainda não há avaliações
- 2016 OWIKIT CatalogDocumento12 páginas2016 OWIKIT CatalogOwi DanielAinda não há avaliações
- CamDocumento95 páginasCamMurugesan KandaAinda não há avaliações
- Artificia Hand ,,project by Sri ChinniDocumento7 páginasArtificia Hand ,,project by Sri Chinnisrichinni786100% (2)
- Industrial Fault Indication System Using Avr MicrocontrollerDocumento15 páginasIndustrial Fault Indication System Using Avr Microcontrollersri_palakolanuAinda não há avaliações
- REPORT OF AUTOMATIC Smart Car Barrier USING ARDUINODocumento24 páginasREPORT OF AUTOMATIC Smart Car Barrier USING ARDUINOsaAinda não há avaliações
- Wireless Power Transmission Final ReportDocumento22 páginasWireless Power Transmission Final ReportAkhil Rastogi43% (7)
- Adaptive Cruise Control: A Technical Seminar Report Submitted OnDocumento24 páginasAdaptive Cruise Control: A Technical Seminar Report Submitted OnPrakashAinda não há avaliações
- Dynamic Traffic Light Control Using Microcontroller: Industrial and Control EngineeringDocumento49 páginasDynamic Traffic Light Control Using Microcontroller: Industrial and Control EngineeringTalemaAinda não há avaliações
- Technical Seminar e Skin DocumentationDocumento20 páginasTechnical Seminar e Skin DocumentationKiran SaiAinda não há avaliações
- Facial-Landmark-Detection-Using-CNN-ReportDocumento47 páginasFacial-Landmark-Detection-Using-CNN-ReportMpho NetshifhefheAinda não há avaliações
- Handwritten Character Recognition ModelDocumento23 páginasHandwritten Character Recognition ModelAahn DeshpandeAinda não há avaliações
- Automatic Door Control SystemDocumento52 páginasAutomatic Door Control SystemLitesh MiglaniAinda não há avaliações
- Mini ProjectDocumento79 páginasMini ProjectHarish KhanAinda não há avaliações
- Mini ProjectDocumento40 páginasMini ProjectPakki Akhil KumarAinda não há avaliações
- Contact-less Digital TachometerDocumento61 páginasContact-less Digital TachometernavyaAinda não há avaliações
- CV To EV Project ReportDocumento25 páginasCV To EV Project ReportSaini boyAinda não há avaliações
- Magnetic GearDocumento28 páginasMagnetic GearGeetha Lekshmi KAinda não há avaliações
- Wearable Biosensors: Enabling Real-Time Health MonitoringDocumento25 páginasWearable Biosensors: Enabling Real-Time Health MonitoringPrakashAinda não há avaliações
- Minor Project Front PagesDocumento13 páginasMinor Project Front PagesAbhishek MeAinda não há avaliações
- Rajarshi Rananjay Sinh Institute of Management and TechnologyDocumento60 páginasRajarshi Rananjay Sinh Institute of Management and TechnologySiva KumarAinda não há avaliações
- Bachelor of Technology Electronics and Communication EngineeringDocumento40 páginasBachelor of Technology Electronics and Communication EngineeringSumanth chowdaryAinda não há avaliações
- Variable Frequency Drives: A Technical Seminar Report ONDocumento27 páginasVariable Frequency Drives: A Technical Seminar Report ON18-208 LingaAinda não há avaliações
- Visual Ruler: Bachelor of TechnologyDocumento21 páginasVisual Ruler: Bachelor of TechnologySuha AhmedAinda não há avaliações
- Basic Electronics 1st Year LMDocumento61 páginasBasic Electronics 1st Year LMDwitikrushna MaharanaAinda não há avaliações
- Certificate N IndexDocumento6 páginasCertificate N IndexSamara Simha ReddyAinda não há avaliações
- Tech Sem Doc 215Documento27 páginasTech Sem Doc 215shanmukhaAinda não há avaliações
- Trisha Raj ProjectDocumento19 páginasTrisha Raj ProjectSameen AhmadAinda não há avaliações
- Adaptive Cruise Control Technical SeminarDocumento12 páginasAdaptive Cruise Control Technical SeminarPrakashAinda não há avaliações
- Computer Numerical Control (CNC) : Developed ATDocumento52 páginasComputer Numerical Control (CNC) : Developed ATAkash SaraogiAinda não há avaliações
- Mahesh Reddy DTHDocumento45 páginasMahesh Reddy DTHMaheshreddy NelloreAinda não há avaliações
- P 3483 Line Following RobotDocumento98 páginasP 3483 Line Following RobotThe Aviator000% (1)
- Voice Controlled Wheel ChairDocumento27 páginasVoice Controlled Wheel ChairPranav PrashobAinda não há avaliações
- Voice Controlled Wheelchair: Voice and Joystick Controlled WheelchairDocumento27 páginasVoice Controlled Wheelchair: Voice and Joystick Controlled WheelchairPranav PrashobAinda não há avaliações
- Simulation and Design of Torpedo Using BLDCmotorDocumento27 páginasSimulation and Design of Torpedo Using BLDCmotorVinay SankhatAinda não há avaliações
- Vehicle To Vehicle Communication Using RF & Ir TechnologyDocumento51 páginasVehicle To Vehicle Communication Using RF & Ir TechnologyClassic PrintersAinda não há avaliações
- Automatic Traffic Light Control System: Bachleor of TechnologyDocumento33 páginasAutomatic Traffic Light Control System: Bachleor of TechnologyRohini LekkalaAinda não há avaliações
- Project On Image ProccessingDocumento18 páginasProject On Image Proccessingmanas singhAinda não há avaliações
- Sim Card Bassed Prepaid Enegy Store Meter: A Project ReportDocumento48 páginasSim Card Bassed Prepaid Enegy Store Meter: A Project ReportSyedMahinAinda não há avaliações
- Proj REPORT-1Documento43 páginasProj REPORT-120 O3 004 ARUN M NAinda não há avaliações
- DDGKZK JZDBVKJDFZB KDZB DZNBDDocumento31 páginasDDGKZK JZDBVKJDFZB KDZB DZNBDPriyanka PriyaAinda não há avaliações
- Index of Code LockDocumento7 páginasIndex of Code LockChirag MistryAinda não há avaliações
- Augmented Reality SEMINAR REPORT SubmittDocumento73 páginasAugmented Reality SEMINAR REPORT SubmittTUSHAR NAMAAinda não há avaliações
- Telepresence RobotDocumento22 páginasTelepresence RobotWØRLD HÖPZAinda não há avaliações
- Home AutomationDocumento33 páginasHome AutomationRavi KumarAinda não há avaliações
- AI Documention - MergedDocumento29 páginasAI Documention - MergedShashidhar KarravulaAinda não há avaliações
- A Mini Project ReportDocumento54 páginasA Mini Project ReportPosi NamdamAinda não há avaliações
- 18EC090-Yashesh MP1 ReportDocumento31 páginas18EC090-Yashesh MP1 ReportYashesh PatelAinda não há avaliações
- E-Ball Technology: A GuideDocumento40 páginasE-Ball Technology: A Guideanil kumarAinda não há avaliações
- Synopsis of GSM Based Remote Electricity Billing SystemDocumento52 páginasSynopsis of GSM Based Remote Electricity Billing SystemHemant PatelAinda não há avaliações
- A Technical Seminar Report On: Wireless Power TransmissionDocumento5 páginasA Technical Seminar Report On: Wireless Power Transmissionmohan2690Ainda não há avaliações
- Digital Product Blueprint-1Documento56 páginasDigital Product Blueprint-1umarmukhtarabbaAinda não há avaliações
- VWR MU 6100L Multi Meter Operating ManualDocumento110 páginasVWR MU 6100L Multi Meter Operating ManualSC ChaiAinda não há avaliações
- Service Manual: XB-2, XB-SNDocumento46 páginasService Manual: XB-2, XB-SNChristophe HomandAinda não há avaliações
- Internsship - Project - Arjun Singh FinalDocumento78 páginasInternsship - Project - Arjun Singh FinalAnmol DubeyAinda não há avaliações
- IBM Design Thinking Field Guide Watson Build v3.5 - AcDocumento29 páginasIBM Design Thinking Field Guide Watson Build v3.5 - Acccchan100% (2)
- Multiplex Ticket Booking SystemDocumento23 páginasMultiplex Ticket Booking SystemMohit Kumar Lal100% (1)
- Bist Tutorial 2 PDFDocumento9 páginasBist Tutorial 2 PDFjcfermosellAinda não há avaliações
- Citronix Product Catalog Ci5000 Series v2Documento14 páginasCitronix Product Catalog Ci5000 Series v2elrohirsurion86Ainda não há avaliações
- Title Layout: SubtitleDocumento12 páginasTitle Layout: Subtitleriska augustAinda não há avaliações
- Led TV Led TV: Service Manual Service ManualDocumento101 páginasLed TV Led TV: Service Manual Service Manualboroda2410100% (4)
- IMO 2nd Level Result - Science Olympiad Foundation (SOF) PDFDocumento3 páginasIMO 2nd Level Result - Science Olympiad Foundation (SOF) PDFkvinodan730% (2)
- Universiti Tun Hussein Onn Malaysia Faculty of Mechanical and Manufacturing Engineering BDA 24202 Computer Programming Individual Assignment (10%)Documento1 páginaUniversiti Tun Hussein Onn Malaysia Faculty of Mechanical and Manufacturing Engineering BDA 24202 Computer Programming Individual Assignment (10%)farooq MusaAinda não há avaliações
- Cutting Master5 Manual EngDocumento85 páginasCutting Master5 Manual Engdiegodaer77Ainda não há avaliações
- XML File UploadDocumento5 páginasXML File Uploadkanhaiya_priyadarshiAinda não há avaliações
- Anson Ortigas FPS Sell-Out Report Week 2 JuneDocumento30 páginasAnson Ortigas FPS Sell-Out Report Week 2 JuneRevssor PeraltaAinda não há avaliações
- Baumuller DSC Высокомоментные СерводвигателиDocumento112 páginasBaumuller DSC Высокомоментные СерводвигателиNoks stAinda não há avaliações
- Business Plan Report-Auto-Acoustic IncDocumento10 páginasBusiness Plan Report-Auto-Acoustic IncLongyin WangAinda não há avaliações
- SW Ass1Documento9 páginasSW Ass1Mintesinot MeleseAinda não há avaliações
- SCM Process Assessment and Evaluation: Abcan Consulting IncDocumento25 páginasSCM Process Assessment and Evaluation: Abcan Consulting IncFadzilah MohamadAinda não há avaliações
- 192.168.1.1 - ZTE ZXHN F609 Router Login and PasswordDocumento1 página192.168.1.1 - ZTE ZXHN F609 Router Login and PasswordMetirano Naomi100% (3)
- 6, HM.2023Documento5 páginas6, HM.2023Want OAinda não há avaliações
- CompTIA+PenTest++ (PT0 002) +Study+NotesDocumento234 páginasCompTIA+PenTest++ (PT0 002) +Study+NotesDaniel ProfantAinda não há avaliações
- Introduction To PythonDocumento15 páginasIntroduction To PythonSamyak JainAinda não há avaliações
- ADSP-2100 Family User's ManualDocumento486 páginasADSP-2100 Family User's ManualMuthu SumaAinda não há avaliações
- User Manual - English (Vodacom)Documento2 páginasUser Manual - English (Vodacom)OratilweAinda não há avaliações
- Network Devices Hubs, Switches, RoutersDocumento24 páginasNetwork Devices Hubs, Switches, RoutersPaul67% (3)
- LC-75N8000U User ManualDocumento91 páginasLC-75N8000U User ManualtrillianhAinda não há avaliações
- Gt101: Learning and Information Technology Tu170: Computing EssentialsDocumento37 páginasGt101: Learning and Information Technology Tu170: Computing EssentialsdeeAinda não há avaliações
- W970suw PDFDocumento104 páginasW970suw PDFEdu Kees MorelloAinda não há avaliações
- Bank Management System Project ReportDocumento19 páginasBank Management System Project ReportKharoudAinda não há avaliações