Você também pode gostar
- On Prepaid Energy MeterDocumento26 páginasOn Prepaid Energy MetermayankAinda não há avaliações
- AcknowledgmentDocumento8 páginasAcknowledgmentUjwal Parteke100% (1)
- EC2403 RF and Microwave Engineering Lecture NotesDocumento58 páginasEC2403 RF and Microwave Engineering Lecture NotesSasi RekhaAinda não há avaliações
- Project Report Transmission Line Fault MonitoringDocumento34 páginasProject Report Transmission Line Fault Monitoringkra_amAinda não há avaliações
- Artificial Intelligence in Power StationDocumento18 páginasArtificial Intelligence in Power Stationruman danish100% (1)
- Automatic Meter ReadingDocumento16 páginasAutomatic Meter ReadingDrVikas Singh BhadoriaAinda não há avaliações
- Project - Water Level IndicatorDocumento15 páginasProject - Water Level IndicatorGANGSTERS BOYSAinda não há avaliações
- Transmission Line Fault MonitoringDocumento16 páginasTransmission Line Fault MonitoringVikash Vicky KumarAinda não há avaliações
- Project Report On Snake Mania Game: Submitted in Partial Fulfillment of The Requirements For The Award of Degree ofDocumento65 páginasProject Report On Snake Mania Game: Submitted in Partial Fulfillment of The Requirements For The Award of Degree ofShivam PandeyAinda não há avaliações
- Arduino Based Underground and Overhead Cable Fault DetectionDocumento7 páginasArduino Based Underground and Overhead Cable Fault DetectionUmair Mansoor100% (1)
- Comparison of Tdma, Cdma, Fdma and SdmaDocumento3 páginasComparison of Tdma, Cdma, Fdma and SdmaVivekananda Ganjigunta Narayana0% (1)
- Microprocessor Based RelayDocumento3 páginasMicroprocessor Based RelayHaseeb AhmedAinda não há avaliações
- Design & Implementation of Patient Monitoring System Using MicrocontrollerDocumento9 páginasDesign & Implementation of Patient Monitoring System Using MicrocontrollerBereket Abi Mulugeta100% (1)
- Design of Unified Power Quality Conditioner Using Fuzzy Logic Controller To Improve Power QualityDocumento76 páginasDesign of Unified Power Quality Conditioner Using Fuzzy Logic Controller To Improve Power QualityPhani PhaniAinda não há avaliações
- Batch 4 Major Project PPT WaveletDocumento27 páginasBatch 4 Major Project PPT WaveletAdluri srikarAinda não há avaliações
- Smart Energy MeterDocumento16 páginasSmart Energy Meterjhansi gouravarapuAinda não há avaliações
- Srs For Online Examination Sys.Documento6 páginasSrs For Online Examination Sys.Akshay SinghAinda não há avaliações
- Simple Password Security System Using Logic Gates in MultisimDocumento8 páginasSimple Password Security System Using Logic Gates in Multisimantoreep ghatak0% (1)
- Automatic Rain Operated Wiper Using Solar EnergyDocumento16 páginasAutomatic Rain Operated Wiper Using Solar EnergyPraveen KumarAinda não há avaliações
- Advanced Relaying and ProtectionDocumento2 páginasAdvanced Relaying and ProtectionshivaniAinda não há avaliações
- For Quadrant DC Motor ControlDocumento43 páginasFor Quadrant DC Motor ControlDarshanRupani100% (1)
- Rao Bahadur Y Mahabaleswarappa Engineering College, Ballari: Digital Phase SelectorDocumento14 páginasRao Bahadur Y Mahabaleswarappa Engineering College, Ballari: Digital Phase SelectorRaashi Kolgal0% (1)
- At&C Losses ReductionDocumento27 páginasAt&C Losses ReductionBashir AhmadAinda não há avaliações
- 85.intelligent Fire Detector With Automatic Water Sprinkler System To Avoid Fire AccidentsDocumento3 páginas85.intelligent Fire Detector With Automatic Water Sprinkler System To Avoid Fire AccidentsvenkeyharishAinda não há avaliações
- Boost Converter Using Arduino PDFDocumento54 páginasBoost Converter Using Arduino PDFali ghalibAinda não há avaliações
- Accident Detection Using IOT Project Report FinalDocumento51 páginasAccident Detection Using IOT Project Report Finalchinju mdasAinda não há avaliações
- Automatic Garbage Intimator Final ReportDocumento28 páginasAutomatic Garbage Intimator Final ReportPola AshutoshAinda não há avaliações
- Password Protected Circuit Breaker: Audisankara Institute of TechnologyDocumento22 páginasPassword Protected Circuit Breaker: Audisankara Institute of TechnologyGokul SriramAinda não há avaliações
- DSP 18eel67 FinalDocumento94 páginasDSP 18eel67 FinalBlackopsAinda não há avaliações
- HVDCDocumento5 páginasHVDCAlluri Appa RaoAinda não há avaliações
- File-STREET LIGHT THAT GLOWS ON DETECTING VEHICLE MOVEMENTDocumento2 páginasFile-STREET LIGHT THAT GLOWS ON DETECTING VEHICLE MOVEMENTChhaya Rathi0% (1)
- 10 - Introduction To Power System ReliabilityDocumento35 páginas10 - Introduction To Power System ReliabilityRaspberry PiAinda não há avaliações
- Project Report EngineeringDocumento48 páginasProject Report EngineeringSonu DhangarAinda não há avaliações
- Wireless Based Railway Bridge Damage & Track Fault Notification With Alarm SystemsDocumento5 páginasWireless Based Railway Bridge Damage & Track Fault Notification With Alarm Systemsமணிவேல் சந்திரன்100% (1)
- Automatic Fault Detection and Location of Transmission Lines Using IoTDocumento5 páginasAutomatic Fault Detection and Location of Transmission Lines Using IoTGRD JournalsAinda não há avaliações
- Mini Project Report FINAL1Documento46 páginasMini Project Report FINAL1Nikhil100% (1)
- SCADA Seminar ReportDocumento34 páginasSCADA Seminar ReportAshutosh Maurya100% (2)
- Traffic Light Sensor Using Arduino BoardDocumento24 páginasTraffic Light Sensor Using Arduino BoardArunkumarAinda não há avaliações
- Intelligent Management of Electrical Systems in IndustriesDocumento29 páginasIntelligent Management of Electrical Systems in Industriesh_akbarshariff50% (2)
- Ultra Capacitor AbstractDocumento2 páginasUltra Capacitor AbstractSanthosh Kumar NeelamAinda não há avaliações
- Multiplexer & DemultiplexerDocumento22 páginasMultiplexer & DemultiplexerANJALI PATELAinda não há avaliações
- Project ProposalDocumento8 páginasProject Proposalazlisan89Ainda não há avaliações
- Seminar Report On Aluminum-Electrolytic-CapacitorDocumento19 páginasSeminar Report On Aluminum-Electrolytic-CapacitorChitranshu Srivastav0% (2)
- A Micro-Project Report On ": Metal Detector Circuit"Documento34 páginasA Micro-Project Report On ": Metal Detector Circuit"Om PawarAinda não há avaliações
- Real Time Automated Load Shedding SystemDocumento28 páginasReal Time Automated Load Shedding SystemSangeetha Vishwanath100% (5)
- 18EE51 (Module 04)Documento14 páginas18EE51 (Module 04)Rajath N Gowda 1SG18EE062Ainda não há avaliações
- Digital Phase Selector (Project Report)Documento66 páginasDigital Phase Selector (Project Report)Ashish Verma91% (11)
- Summer Training Embedded SystemDocumento18 páginasSummer Training Embedded SystemmjcetpaAinda não há avaliações
- Electricity Power Billing Management System ProjectDocumento15 páginasElectricity Power Billing Management System Projectpradeep peterAinda não há avaliações
- Electricity Theft Detection: Using Machine LearningDocumento23 páginasElectricity Theft Detection: Using Machine LearningAnshul Shrivastava 4-Yr B.Tech. Electrical Engg., IIT (BHU) Varanasi100% (1)
- Electrical Workshop: Topic: Go Down WiringDocumento9 páginasElectrical Workshop: Topic: Go Down WiringSaad khan100% (1)
- RMT 2 MarksDocumento22 páginasRMT 2 MarksSubathra Devi Mourougane100% (3)
- Underground Cable Fault Detection Using ZigbeeDocumento36 páginasUnderground Cable Fault Detection Using ZigbeeRana AbrarAinda não há avaliações
- Auto Intensity Control of Street LightDocumento53 páginasAuto Intensity Control of Street LightNikhith ReddyAinda não há avaliações
- Iot Based Weather Monitoring System: Achal Pramod Gohade (PRN: 1841018)Documento29 páginasIot Based Weather Monitoring System: Achal Pramod Gohade (PRN: 1841018)Achal GohadeAinda não há avaliações
- Finger Print Based Electronic Voting MachineDocumento4 páginasFinger Print Based Electronic Voting Machinesagarsm2Ainda não há avaliações
- Cable FaultDocumento103 páginasCable FaultshaikintiyazsultanaAinda não há avaliações
- Underground Cable Fault Detection SystemDocumento4 páginasUnderground Cable Fault Detection SystemJh wAinda não há avaliações
- Underground Fault Protection ReportDocumento9 páginasUnderground Fault Protection ReportHitesh SoniAinda não há avaliações
- Automated Broad and Narrow Band Impedance Matching for RF and Microwave CircuitsNo EverandAutomated Broad and Narrow Band Impedance Matching for RF and Microwave CircuitsAinda não há avaliações
- Micro Sim TemplateDocumento1 páginaMicro Sim TemplateNikhil GargAinda não há avaliações
- Curriculum - RobochampsDocumento16 páginasCurriculum - RobochampsSarimAinda não há avaliações
- MSD 26 PDFDocumento146 páginasMSD 26 PDFxana_sweetAinda não há avaliações
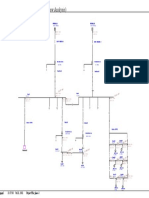
- One-Line Diagram - OLV1 (Load Flow Analysis) : 33.0 7 KV 33.0 7 KV 33.0 7 KV 33.0 7 KVDocumento1 páginaOne-Line Diagram - OLV1 (Load Flow Analysis) : 33.0 7 KV 33.0 7 KV 33.0 7 KV 33.0 7 KVhaiderAinda não há avaliações
- Pentest Open 08 2013Documento76 páginasPentest Open 08 2013Jose Simpson100% (1)
- The Research Proposal CH 1Documento7 páginasThe Research Proposal CH 1Kamar FayezAinda não há avaliações
- Modern Power System Matlab Simulation, Pspice, SVC-HVDC Transmission, STATCOM, Location of Facts, Power System ME, M.tech, B.Tech, BE Final Year IEEE Projects 2011 - 2012Documento3 páginasModern Power System Matlab Simulation, Pspice, SVC-HVDC Transmission, STATCOM, Location of Facts, Power System ME, M.tech, B.Tech, BE Final Year IEEE Projects 2011 - 2012srini_792002Ainda não há avaliações
- Cs HCM Person Basic Sync Hcm92 To Cs9Documento8 páginasCs HCM Person Basic Sync Hcm92 To Cs9cdahlinAinda não há avaliações
- B.Tech (PT) - Mathematics - II YEAR - III SEM - (R) 2012 PDFDocumento15 páginasB.Tech (PT) - Mathematics - II YEAR - III SEM - (R) 2012 PDFmohamed irshadAinda não há avaliações
- X BX+C 0: Quarter 1: SUMMATIVE TEST #1 (Quadratic Equation and Quadratic Inequality) Mathematics 9Documento3 páginasX BX+C 0: Quarter 1: SUMMATIVE TEST #1 (Quadratic Equation and Quadratic Inequality) Mathematics 9Guada LupeAinda não há avaliações
- Automated Quality Inspection of Bottles Crates Through Image ProcessingDocumento17 páginasAutomated Quality Inspection of Bottles Crates Through Image ProcessingnasnasAinda não há avaliações
- EEG Amplifier Development BoardDocumento27 páginasEEG Amplifier Development BoardHaseeb Ur RehmanAinda não há avaliações
- Mobius Industries Marketing CVDocumento2 páginasMobius Industries Marketing CVIssy TurtonAinda não há avaliações
- ShockLog Essentials v10 4Documento79 páginasShockLog Essentials v10 4William Rubio AvilaAinda não há avaliações
- Acceptable Use AgreementDocumento2 páginasAcceptable Use Agreementapi-325973069Ainda não há avaliações
- Oscar 3.0 11 2021 DCDocumento2 páginasOscar 3.0 11 2021 DCSebastian RentschAinda não há avaliações
- Diris A 30 A 41 Multifunction Measuring Unit PMD Catalogue Pages 2022 11 Dcg00733 enDocumento6 páginasDiris A 30 A 41 Multifunction Measuring Unit PMD Catalogue Pages 2022 11 Dcg00733 enAbdelrazek MohamedAinda não há avaliações
- THEORY For Wein Bridge Oscillator Using Ic 741 Op AmpDocumento1 páginaTHEORY For Wein Bridge Oscillator Using Ic 741 Op AmpPurnima Sri Sai100% (1)
- Accu-Chek Active User Manual PDFDocumento70 páginasAccu-Chek Active User Manual PDFjoseluisblanco69Ainda não há avaliações
- IDOCs (For Functional Consultants - Set Up & Trouble Shooting)Documento33 páginasIDOCs (For Functional Consultants - Set Up & Trouble Shooting)Rajat Kapoor100% (1)
- PVCMC 0296 Us - tcm106 35825Documento233 páginasPVCMC 0296 Us - tcm106 35825enrique.riera7693Ainda não há avaliações
- What Is SAP R/3?Documento35 páginasWhat Is SAP R/3?jitinmangla970Ainda não há avaliações
- Downgrade Request Form - Cesareo Angelo Banol 09202022Documento2 páginasDowngrade Request Form - Cesareo Angelo Banol 09202022Cesareo Angelo BanolAinda não há avaliações
- Assignment 04 SolutionDocumento3 páginasAssignment 04 Solutionmaroua.sayahAinda não há avaliações
- 1 Prolog 01-06-2012Documento5 páginas1 Prolog 01-06-2012A B M Moniruzzaman KhanAinda não há avaliações
- G Is The Cop Number of G. We Present Asymptotic Results For TheDocumento16 páginasG Is The Cop Number of G. We Present Asymptotic Results For Thesaravanancseb8567Ainda não há avaliações
- Beyblade Burst Scanning InstructionsDocumento1 páginaBeyblade Burst Scanning InstructionsJagan SathishAinda não há avaliações
- RULE7-8 ProblemAnalysis PDFDocumento109 páginasRULE7-8 ProblemAnalysis PDFMhae Torres100% (1)
- An Is Perspective of Mergers and AcquisitionsDocumento54 páginasAn Is Perspective of Mergers and AcquisitionsSonia BenitoAinda não há avaliações