Você também pode gostar
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (345)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- DIY - Basic Cylinder Head Porting - Standard Abrasives Motor Sports PDFDocumento10 páginasDIY - Basic Cylinder Head Porting - Standard Abrasives Motor Sports PDFkristof2273Ainda não há avaliações
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- Dodge Durango 1999 DN Parts CatalogueDocumento20 páginasDodge Durango 1999 DN Parts Cataloguemark100% (33)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- 2008 Seadoo Shop ManualDocumento555 páginas2008 Seadoo Shop Manualanon_846090969100% (3)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- Army TM 9-2320-361-20p Air Force To 36a12-1b-1114Documento1.188 páginasArmy TM 9-2320-361-20p Air Force To 36a12-1b-1114wetface100% (1)
- Manufacturing Processes Ch.4 (10 and 11) CastingDocumento143 páginasManufacturing Processes Ch.4 (10 and 11) Castingashoku24007Ainda não há avaliações
- Operation and Maintenance of A Gas Insulated SubstationDocumento36 páginasOperation and Maintenance of A Gas Insulated SubstationChihiya Fitria NurhayatiAinda não há avaliações
- Blackwell,.Strategy and Capability - Sustaining Organizational Change. (2003.ISBN0631228454)Documento219 páginasBlackwell,.Strategy and Capability - Sustaining Organizational Change. (2003.ISBN0631228454)Mukhamad SantosaAinda não há avaliações
- Engine Manual of WeichaiDocumento121 páginasEngine Manual of Weichaizein zee100% (9)
- Nerator in Power PlantDocumento13 páginasNerator in Power PlantChihiya Fitria Nurhayati100% (1)
- Chassis Design Report PDFDocumento8 páginasChassis Design Report PDFPrakhar YadavAinda não há avaliações
- MIDAS ChecklistDocumento27 páginasMIDAS ChecklistBhagirath JoshiAinda não há avaliações
- AUMA enDocumento60 páginasAUMA enEmma AlexandruAinda não há avaliações
- BS 5154Documento22 páginasBS 5154Chihiya Fitria Nurhayati50% (2)
- Asme Viii d1 Nma Appendix GDocumento2 páginasAsme Viii d1 Nma Appendix GChihiya Fitria NurhayatiAinda não há avaliações
- Asl Ga55+90-02 9095 0504 76 PDFDocumento72 páginasAsl Ga55+90-02 9095 0504 76 PDFMushfiqur RahmanAinda não há avaliações
- Sinusoidal Voltage - Non Sinusoidal Current ProblemDocumento2 páginasSinusoidal Voltage - Non Sinusoidal Current ProblemChihiya Fitria NurhayatiAinda não há avaliações
- TF23143320Documento2 páginasTF23143320Chihiya Fitria NurhayatiAinda não há avaliações
- Non Sinusoidal Voltage - Non Sinusoidal Current ProblemDocumento3 páginasNon Sinusoidal Voltage - Non Sinusoidal Current ProblemChihiya Fitria Nurhayati100% (1)
- Jurnal Usulan PerbaikanDocumento10 páginasJurnal Usulan PerbaikanChihiya Fitria NurhayatiAinda não há avaliações
- 1LG4316-8AB90 L1L Datasheet enDocumento1 página1LG4316-8AB90 L1L Datasheet enChihiya Fitria NurhayatiAinda não há avaliações
- 01 P & I Legend 1062M100s1rCDocumento1 página01 P & I Legend 1062M100s1rCChihiya Fitria NurhayatiAinda não há avaliações
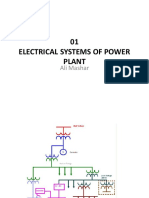
- 01.electrical Systems of PPDocumento7 páginas01.electrical Systems of PPChihiya Fitria NurhayatiAinda não há avaliações
- Standard Prequalification Form For ContractorsDocumento14 páginasStandard Prequalification Form For ContractorsChihiya Fitria Nurhayati100% (1)
- Standard Prequalification Form For Contractors: Name and Address of The ContractorDocumento4 páginasStandard Prequalification Form For Contractors: Name and Address of The ContractorChihiya Fitria NurhayatiAinda não há avaliações
- Asme Viii d1 Ma Appendix 28Documento3 páginasAsme Viii d1 Ma Appendix 28Chihiya Fitria NurhayatiAinda não há avaliações
- Div. 1 - Cover SheetDocumento2 páginasDiv. 1 - Cover SheetChihiya Fitria NurhayatiAinda não há avaliações
- An Interstate Natural Gas Facility On My Land? What Do I Need To Know?Documento8 páginasAn Interstate Natural Gas Facility On My Land? What Do I Need To Know?Chihiya Fitria NurhayatiAinda não há avaliações
- Table of Contents Div Nos. 1, 2 & 3Documento8 páginasTable of Contents Div Nos. 1, 2 & 3Chihiya Fitria NurhayatiAinda não há avaliações
- PMSM 2012Documento62 páginasPMSM 2012Sreerag Kunnathu Sugathan100% (3)
- 下载Documento4 páginas下载Mars JackAinda não há avaliações
- Hydraulic Quiz 8Documento8 páginasHydraulic Quiz 8Aireuxs AdjarainiAinda não há avaliações
- Horizontal Cylindrical Pressure Steam Sterilizer (Microcomputer Control)Documento2 páginasHorizontal Cylindrical Pressure Steam Sterilizer (Microcomputer Control)asep budiyantoAinda não há avaliações
- Belt Alignment ToolDocumento2 páginasBelt Alignment ToolAshutosh VishwakarmaAinda não há avaliações
- Block Die Positioning and Pre-ProcessingDocumento18 páginasBlock Die Positioning and Pre-ProcessingAndres CaizaAinda não há avaliações
- Angular GripperDocumento12 páginasAngular GripperAman RajAinda não há avaliações
- Wind Analysis (Print)Documento43 páginasWind Analysis (Print)Limwell AquinoAinda não há avaliações
- SchifflerisedDocumento17 páginasSchifflerisedJitendraAinda não há avaliações
- BCM Capacity ChartDocumento1 páginaBCM Capacity ChartKrishnaKumar BangaruAinda não há avaliações
- Carrier Supra 644 Refrigeration Unit For TrucksDocumento2 páginasCarrier Supra 644 Refrigeration Unit For TrucksgoogleheadAinda não há avaliações
- Technical Catalogue ULMA Conveyor 2016Documento54 páginasTechnical Catalogue ULMA Conveyor 2016Nasir NeyazAinda não há avaliações
- Cuptor Coven - 6emd UslDocumento22 páginasCuptor Coven - 6emd UslPaul MocanuAinda não há avaliações
- 6.missile DescriptionDocumento31 páginas6.missile DescriptionJorge Antonio Chávez MirandaAinda não há avaliações
- SwissDocumento8 páginasSwissRajaram RamanAinda não há avaliações
- Volvo TAD1641VEDocumento7 páginasVolvo TAD1641VEJokoAinda não há avaliações
- Materials System SpecificationDocumento19 páginasMaterials System SpecificationGOSP3 QC MechanicalAinda não há avaliações
- Welding Symbols and NomenclatureDocumento17 páginasWelding Symbols and Nomenclaturesa saAinda não há avaliações
- JoysticksDocumento12 páginasJoysticksJuan Carlos Aragon CompiAinda não há avaliações
- Air Standard CycleDocumento93 páginasAir Standard CycleJonathan CerdanAinda não há avaliações