Você também pode gostar
- Bendix Air Brake HandbookDocumento67 páginasBendix Air Brake Handbookwmaresko100% (4)
- Climate SystemDocumento25 páginasClimate Systeminformer techAinda não há avaliações
- Valves and Unit Injectors, AdjustingDocumento9 páginasValves and Unit Injectors, Adjustingcarlos maradiagaAinda não há avaliações
- Actuator Variable Geometry Turbocharger ReplacementDocumento11 páginasActuator Variable Geometry Turbocharger ReplacementZoltán Szecsődi100% (1)
- Data Link, Fault Tracing V2Documento22 páginasData Link, Fault Tracing V2Minn Thet NaingAinda não há avaliações
- Meritor Axle MS-113Documento46 páginasMeritor Axle MS-113ford62b100% (2)
- Meritor ABS TrainingDocumento108 páginasMeritor ABS Trainingford62b100% (3)
- Service Manual: Failure Analysis June 2009Documento50 páginasService Manual: Failure Analysis June 2009ericAinda não há avaliações
- Meritor ManualDocumento192 páginasMeritor ManualJanisse B. Padilla100% (1)
- 2013 Nissan Altima 45947 PDFDocumento1.000 páginas2013 Nissan Altima 45947 PDFMohd Fairus100% (1)
- Catalogo Abs Meritor WabcoDocumento12 páginasCatalogo Abs Meritor Wabcosifuentes18100% (3)
- Wabco 1 PDFDocumento192 páginasWabco 1 PDFdottorgt584590% (10)
- Volvos I - ShiftDocumento60 páginasVolvos I - ShiftStephenson100% (8)
- DAF CF Braking System Service ManualDocumento288 páginasDAF CF Braking System Service ManualAlex100% (1)
- Service Manual Trucks: Error Codes, Climate Control MID 146 Cu-Bas, Cu-Mcc, Cu-EccDocumento52 páginasService Manual Trucks: Error Codes, Climate Control MID 146 Cu-Bas, Cu-Mcc, Cu-Eccrayanto rayantoAinda não há avaliações
- Truck AbsDocumento48 páginasTruck Absautomotriz100% (1)
- Cooling System, Service MP7 EPA2004, EPA2007Documento150 páginasCooling System, Service MP7 EPA2004, EPA2007Hamilton MirandaAinda não há avaliações
- DAVIE Quick Ref Guide 2012 - ProgrammingDocumento2 páginasDAVIE Quick Ref Guide 2012 - ProgrammingCharly Ramos100% (1)
- Wabco Trailer Air BrakesDocumento102 páginasWabco Trailer Air Brakessivanesan100% (1)
- VOLVO Oil Pump Replacement D13Documento13 páginasVOLVO Oil Pump Replacement D13Miguel Angel Sancho100% (1)
- Service Manual Trucks: Anti-Lock Brake System (ABS) Meritor Wabco With E Version Ecu VN/VHDDocumento66 páginasService Manual Trucks: Anti-Lock Brake System (ABS) Meritor Wabco With E Version Ecu VN/VHDjose luis100% (5)
- Wabco Brakes 2Documento35 páginasWabco Brakes 2Shyam Srinivasan100% (3)
- Wabco Brakes 3Documento60 páginasWabco Brakes 3Shyam Srinivasan100% (5)
- TSB-mDRIVE BRAKE COUNTERSHAFT OVERHAULDocumento18 páginasTSB-mDRIVE BRAKE COUNTERSHAFT OVERHAULvicente456Ainda não há avaliações
- Air Brake Manual CompDocumento102 páginasAir Brake Manual Compshan4600100% (1)
- Meritor Rt40-145p 40kDocumento55 páginasMeritor Rt40-145p 40kJuan Rivera100% (1)
- Group 3 - Gearboxes and ClutchDocumento254 páginasGroup 3 - Gearboxes and ClutchTyler Lee100% (2)
- Chapter 16 - Undercarriage Mechanical: Service ManualDocumento44 páginasChapter 16 - Undercarriage Mechanical: Service ManualAugusto OliveiraAinda não há avaliações
- Ivtm - Tire Pressure Monitoring For Commercial Vehicles: System DescriptionDocumento48 páginasIvtm - Tire Pressure Monitoring For Commercial Vehicles: System DescriptionElmin SkuljAinda não há avaliações
- Work, Kinetic Energy and Potential EnergyDocumento28 páginasWork, Kinetic Energy and Potential EnergyMaey AkimAinda não há avaliações
- ELSA 2 Training PresentationDocumento80 páginasELSA 2 Training PresentationMarcos Ramassotti100% (2)
- I-Shift - Optidrive Dual-Clutch Transmission Volvo - Renault - Rema - GermanyDocumento5 páginasI-Shift - Optidrive Dual-Clutch Transmission Volvo - Renault - Rema - Germanylibertyplus100% (1)
- TRUCK - Volvos Steer SystemDocumento75 páginasTRUCK - Volvos Steer SystemNuttenAinda não há avaliações
- WabcoDocumento59 páginasWabcomartecmec100% (2)
- Aeb02181 SCR Controls Interface Req.Documento37 páginasAeb02181 SCR Controls Interface Req.Jose SantosAinda não há avaliações
- Data Acquisition from HD Vehicles Using J1939 CAN BusNo EverandData Acquisition from HD Vehicles Using J1939 CAN BusAinda não há avaliações
- Mercedes Benz & Dodge Sprinter CDI 2000-2006 Owners Workshop ManualNo EverandMercedes Benz & Dodge Sprinter CDI 2000-2006 Owners Workshop ManualNota: 3.5 de 5 estrelas3.5/5 (2)
- MM30 ABS Maintenance Manual For Trucks, Tractor, and Bus PDFDocumento54 páginasMM30 ABS Maintenance Manual For Trucks, Tractor, and Bus PDFNikolic Jovanovic100% (1)
- Electrical EquipmentDocumento605 páginasElectrical EquipmentAlexandr DarmostukAinda não há avaliações
- Wiring Diagram Corrections FH12 16Documento15 páginasWiring Diagram Corrections FH12 16Евгений АксёновAinda não há avaliações
- SAF-HOLLAND Air Suspension Systems and Axles With DruDocumento28 páginasSAF-HOLLAND Air Suspension Systems and Axles With Druspitt157Ainda não há avaliações
- Service Manual Trucks: Electrical General VN, VHD Version2 From Build Date 11.2005Documento108 páginasService Manual Trucks: Electrical General VN, VHD Version2 From Build Date 11.2005Registr Registr100% (1)
- Wabco Wall Chart For Trailer and Truck AbsDocumento1 páginaWabco Wall Chart For Trailer and Truck AbsJay RitschardAinda não há avaliações
- EBS Electronically Controlled Brake System: System and Functional DescriptionDocumento44 páginasEBS Electronically Controlled Brake System: System and Functional Descriptionraidhemed100% (3)
- Meritor Air Brake Workbook PDFDocumento31 páginasMeritor Air Brake Workbook PDFslipsittin100% (1)
- DAVIE - XDcII - 530 - Eng DAF PDFDocumento126 páginasDAVIE - XDcII - 530 - Eng DAF PDFjose breno vieira silva100% (1)
- Air Brake BendixDocumento136 páginasAir Brake Bendixqwureyquwery100% (5)
- Installation Guide: Electronic Braking SystemDocumento132 páginasInstallation Guide: Electronic Braking Systemruman214100% (2)
- Wabco Tebs eDocumento224 páginasWabco Tebs eJelena Tasik100% (4)
- Sorento BL 4WDDocumento106 páginasSorento BL 4WDaleksejik1_604843622100% (5)
- Volvo d13 CanadaDocumento8 páginasVolvo d13 CanadaDIONYBLINKAinda não há avaliações
- LECTURE 5 Cor 1Documento44 páginasLECTURE 5 Cor 1teamrelax75% (4)
- Maintenance Manual 95XF PDFDocumento188 páginasMaintenance Manual 95XF PDFAlberjose Sanchez RuizAinda não há avaliações
- 2.0 Fsi Engine 1 PDFDocumento15 páginas2.0 Fsi Engine 1 PDFMohd Fairus100% (2)
- Workshop Manual MPIDocumento372 páginasWorkshop Manual MPIPhil ProfiliAinda não há avaliações
- 90205-1031DEB F Series MaintenanceInspectionDocumento31 páginas90205-1031DEB F Series MaintenanceInspectionIsaac CarmonaAinda não há avaliações
- Clutch Compressor Service Manual For VolvoDocumento36 páginasClutch Compressor Service Manual For Volvox100% (2)
- Air Brake 2016Documento96 páginasAir Brake 2016api-359742263Ainda não há avaliações
- LR OMEGAS METANO 3 - 4 Cil Nuovi Iniettori GBDocumento47 páginasLR OMEGAS METANO 3 - 4 Cil Nuovi Iniettori GBMohd FairusAinda não há avaliações
- Rainwater and Stormwater Harvesting Systems: Continuing Education From The American Society of Plumbing EngineersDocumento8 páginasRainwater and Stormwater Harvesting Systems: Continuing Education From The American Society of Plumbing Engineers185412Ainda não há avaliações
- NOx Emission Control Technologies in Stationary and Automotive Internal Combustion Engines: Approaches Toward NOx Free AutomobilesNo EverandNOx Emission Control Technologies in Stationary and Automotive Internal Combustion Engines: Approaches Toward NOx Free AutomobilesB. AshokAinda não há avaliações
- BooksrvtDocumento27 páginasBooksrvtGabriel Balcazar100% (4)
- Bosch Abs 5 3Documento32 páginasBosch Abs 5 308088338100% (2)
- 1992 NoAm Protege ServiceDocumento1.164 páginas1992 NoAm Protege Servicecyberbeam100% (2)
- Dss-Volvo Catalogue PDFDocumento182 páginasDss-Volvo Catalogue PDFOscar Bedregal100% (1)
- OC442012e FN72-00 (F2000) SPECIFICATIONS 11-00Documento7 páginasOC442012e FN72-00 (F2000) SPECIFICATIONS 11-00profistarAinda não há avaliações
- MAN TGX26.440 6x2Documento4 páginasMAN TGX26.440 6x2Abrar Hussain100% (1)
- Webco ABS Sensor TestsDocumento4 páginasWebco ABS Sensor TestsДмитрий Пупкин0% (1)
- Trsm0940en-Us 0719Documento263 páginasTrsm0940en-Us 0719Wilson Yesid Perez CastañedaAinda não há avaliações
- I-2 Actual Con PropuestaDocumento1 páginaI-2 Actual Con PropuestaAlejandro VargasAinda não há avaliações
- Civacon Manifold Intallation and Parts Breakdowns 27 Pages PDFDocumento27 páginasCivacon Manifold Intallation and Parts Breakdowns 27 Pages PDFMohd Fairus0% (1)
- Basic Knowledge of Periodic MaintenanceDocumento58 páginasBasic Knowledge of Periodic MaintenanceMohd FairusAinda não há avaliações
- 4.0 Course Registration 30-01-2014Documento13 páginas4.0 Course Registration 30-01-2014TeckYing TanAinda não há avaliações
- TC02MMC03 - CRSDocumento49 páginasTC02MMC03 - CRSMohd FairusAinda não há avaliações
- Liquip Tanker Terminal Loading-Arm Opw CatalgoueDocumento174 páginasLiquip Tanker Terminal Loading-Arm Opw Catalgouefuransu777Ainda não há avaliações
- TC02MMC03 - CRSDocumento49 páginasTC02MMC03 - CRSMohd FairusAinda não há avaliações
- 1990 EA 4WD SuppDocumento677 páginas1990 EA 4WD Suppcyberbeam100% (2)
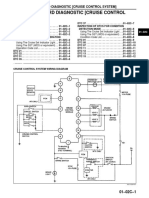
- On-Board Diagnostic (Cruise Control System)Documento12 páginasOn-Board Diagnostic (Cruise Control System)Mohd FairusAinda não há avaliações
- L10-Electrical Diagnostic Tools PDFDocumento9 páginasL10-Electrical Diagnostic Tools PDFMaximiliano MasAinda não há avaliações
- On-Board Diagnostic (Engine Control System (FS) )Documento155 páginasOn-Board Diagnostic (Engine Control System (FS) )Mohd FairusAinda não há avaliações
- 01 02a PDFDocumento146 páginas01 02a PDFJGAR2009Ainda não há avaliações
- 2.0 Fsi Engine 1Documento16 páginas2.0 Fsi Engine 1Mohd FairusAinda não há avaliações
- Analog Vs Digital MetersDocumento0 páginaAnalog Vs Digital Metersjnachum9465Ainda não há avaliações
- 00-00 General InfoDocumento31 páginas00-00 General InfodongvacAinda não há avaliações
- 1990 NoAm 4WD SuppDocumento728 páginas1990 NoAm 4WD SuppcyberbeamAinda não há avaliações
- Etacs BLDocumento74 páginasEtacs BLMohd FairusAinda não há avaliações
- EmDocumento166 páginasEmMohd FairusAinda não há avaliações
- Alhambra 20V MotronicDocumento19 páginasAlhambra 20V MotronicMohd FairusAinda não há avaliações
- Automotive Vehicle MaintenanceDocumento61 páginasAutomotive Vehicle MaintenanceMohd FairusAinda não há avaliações
- BL AbagDocumento74 páginasBL AbagMohd FairusAinda não há avaliações
- NG1-2 RegulatorDocumento5 páginasNG1-2 RegulatorMohd FairusAinda não há avaliações
- NG2 RegulatorDocumento22 páginasNG2 RegulatorMohd FairusAinda não há avaliações
- Paver BlockDocumento16 páginasPaver BlockRavinder Singh100% (1)
- 3 3 3 Reverse Engineering Worksheet 1Documento4 páginas3 3 3 Reverse Engineering Worksheet 1api-275555576Ainda não há avaliações
- IBM Whitepaper OSIMMDocumento22 páginasIBM Whitepaper OSIMMKlaus DoernerAinda não há avaliações
- Ii.7.2 Alat Kedokteran 2 PDFDocumento153 páginasIi.7.2 Alat Kedokteran 2 PDFAguesBudi S TalawangAinda não há avaliações
- Positector Calibration ProcedureDocumento6 páginasPositector Calibration ProcedureluigimasterAinda não há avaliações
- West Virginia Transporter 2017Documento16 páginasWest Virginia Transporter 2017Kyle LangsleyAinda não há avaliações
- A DEH PR-2011-0149-GB MultiMAXX-HN DF R6-10-2015 150dpi PDFDocumento120 páginasA DEH PR-2011-0149-GB MultiMAXX-HN DF R6-10-2015 150dpi PDFConstantin294Ainda não há avaliações
- Shrinkage Strip Method Statment and Ther PDFDocumento4 páginasShrinkage Strip Method Statment and Ther PDFhakim2020Ainda não há avaliações
- Auto Plin Schema Zapojeni Prepinace Autronic As 101Documento28 páginasAuto Plin Schema Zapojeni Prepinace Autronic As 101Tom TalicniAinda não há avaliações
- Pds Microstran LTR en LRDocumento2 páginasPds Microstran LTR en LRthaoAinda não há avaliações
- Hiab Knuckle Boom Articulating Cranes Spec 54f3f3Documento5 páginasHiab Knuckle Boom Articulating Cranes Spec 54f3f3Quỳnh Như Nguyễn ThịAinda não há avaliações
- Classification Matter Flow ChartDocumento1 páginaClassification Matter Flow ChartKiera CeelyAinda não há avaliações
- Denmark Bye LawsDocumento10 páginasDenmark Bye LawshimaniwatalAinda não há avaliações
- Comparative Study of The Performances of Four Photovoltaic-Thermal Solar Air CollectorsDocumento21 páginasComparative Study of The Performances of Four Photovoltaic-Thermal Solar Air CollectorsMarco MGAinda não há avaliações
- Carbon Regeneration KilnsDocumento3 páginasCarbon Regeneration KilnsLuis LabradorAinda não há avaliações
- 5e17f Toshiba Satellite l40 Compal La9862p Compal La9862p r10 Laptop SchematicsDocumento46 páginas5e17f Toshiba Satellite l40 Compal La9862p Compal La9862p r10 Laptop Schematicsamier jrs100% (1)
- Module Pool Select OptionDocumento53 páginasModule Pool Select Optionajit sahuAinda não há avaliações
- S02 Rob Grant Telephone Identifier - BPO 200 Type TelephonesDocumento4 páginasS02 Rob Grant Telephone Identifier - BPO 200 Type TelephonesragscribblerAinda não há avaliações
- University of Cambridge International Examinations General Certificate of Education Advanced LevelDocumento24 páginasUniversity of Cambridge International Examinations General Certificate of Education Advanced LevelHubbak KhanAinda não há avaliações
- Scania Jenerator DC1372A - 438-487kW PDFDocumento2 páginasScania Jenerator DC1372A - 438-487kW PDFMehmet ErenAinda não há avaliações
- AK30 NC Turret User ManualDocumento7 páginasAK30 NC Turret User ManualgsergeyulnAinda não há avaliações
- Roof Manual p10Documento1 páginaRoof Manual p10AllistairAinda não há avaliações
- Mining and Earthmoving: Estimating Production Off-the-Job Grade Resistance Total Resistance TractionDocumento4 páginasMining and Earthmoving: Estimating Production Off-the-Job Grade Resistance Total Resistance Tractionali alilouAinda não há avaliações
- LockingDocumento8 páginasLockingDaniel ManoAinda não há avaliações
- 201 Harga + Brosur (Alat Lab. Beton - Struktur 2014)Documento14 páginas201 Harga + Brosur (Alat Lab. Beton - Struktur 2014)Ridho Aidil FitrahAinda não há avaliações
- Typical Signage Drawings: Information Sign ManualDocumento49 páginasTypical Signage Drawings: Information Sign ManualMaynard BaricaAinda não há avaliações