Você também pode gostar
- Prescripcion PDFDocumento12 páginasPrescripcion PDFJuliana Andrea Castrillon RodriguezAinda não há avaliações
- Muñoz-Picón 2014 PDFDocumento10 páginasMuñoz-Picón 2014 PDFFranco CastroAinda não há avaliações
- 1 - BiomecanicaDocumento3 páginas1 - Biomecanicaapi-3793691100% (1)
- BIOMECÁNICADocumento18 páginasBIOMECÁNICADULCE100% (1)
- Categorias de Medicion (26) Apta ActualizadaDocumento2 páginasCategorias de Medicion (26) Apta ActualizadaCantillo PauAinda não há avaliações
- Teoría de La Adaptación OcupacionalDocumento3 páginasTeoría de La Adaptación OcupacionalIsa Yuki Miranda AlfaroAinda não há avaliações
- Escala de Oxford para Artroplastia de RodillaDocumento4 páginasEscala de Oxford para Artroplastia de RodillaMemo ZepedaAinda não há avaliações
- Tono MuscularDocumento6 páginasTono MuscularAmels HeRnandez100% (1)
- Guía de Goniometría - Libro DigitalDocumento26 páginasGuía de Goniometría - Libro DigitalIvan Monsalve LondoñoAinda não há avaliações
- Pruebas de Longitud MuscularDocumento1 páginaPruebas de Longitud MuscularTania Cecilia100% (1)
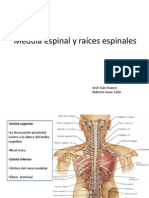
- Medula Espinal y Raíces EspinalesDocumento17 páginasMedula Espinal y Raíces EspinalesusunomAinda não há avaliações
- MeniscopatiaDocumento7 páginasMeniscopatiaEnrique GarridoAinda não há avaliações
- Cluster Articulación SacroiliacaDocumento20 páginasCluster Articulación SacroiliacaLuis Navarro GallegoAinda não há avaliações
- Introducción y Filosofía Diagnóstico Fisioterápico 2020 02Documento11 páginasIntroducción y Filosofía Diagnóstico Fisioterápico 2020 02Andres OñaAinda não há avaliações
- Propuesta Metodológica para El Entrenamiento de La Resistencia CardiorrespiratoriaDocumento18 páginasPropuesta Metodológica para El Entrenamiento de La Resistencia Cardiorrespiratoriamyjp6dc5cfAinda não há avaliações
- Guia de Atencion TempranaDocumento104 páginasGuia de Atencion TempranaTerapeutas Ocupacionales NeurorehabilitadoresAinda não há avaliações
- Ejercicios Aerobicos: Beneficios Del Ejercicio AerobicoDocumento6 páginasEjercicios Aerobicos: Beneficios Del Ejercicio AerobicoDannia AndradeAinda não há avaliações
- 2009 Movilizaciones EspecíficasDocumento20 páginas2009 Movilizaciones EspecíficasHugo AbregoAinda não há avaliações
- Estructura CorporalDocumento65 páginasEstructura Corporalcarga19850% (1)
- Manual PDFDocumento4 páginasManual PDFRicardo Emilio Fernanadez VediaAinda não há avaliações
- Tutoría de Marco de Referencia BiomecánicoDocumento26 páginasTutoría de Marco de Referencia BiomecánicoSebastián Alfredo Díaz RosalesAinda não há avaliações
- POLEOTERAPIADocumento30 páginasPOLEOTERAPIAIvanna MeneAinda não há avaliações
- Método JSI - Job Strain IndexDocumento10 páginasMétodo JSI - Job Strain Indexmbd097Ainda não há avaliações
- Resumen Terapia Manual OrtopédicaDocumento33 páginasResumen Terapia Manual OrtopédicaMarcelo Alejandro Bontes Tamayo100% (1)
- BIOMECANICA PrincipiosDocumento19 páginasBIOMECANICA PrincipiosFer SosaAinda não há avaliações
- Ejercicios Fortalecimiento para EspondilolistesisDocumento4 páginasEjercicios Fortalecimiento para EspondilolistesisOscar SanchezAinda não há avaliações
- Valoracion de La PosturaDocumento6 páginasValoracion de La Posturapizarromdc100% (1)
- Centro de GravedadDocumento5 páginasCentro de GravedadSheySheyAinda não há avaliações
- BIOMECANICADocumento12 páginasBIOMECANICAJORGE FREJA MACIASAinda não há avaliações
- de Caso BiomecanicoDocumento18 páginasde Caso BiomecanicoKiara VásquezAinda não há avaliações
- MarcosreferenciatoDocumento16 páginasMarcosreferenciatoFrancisco DíazAinda não há avaliações
- Resumen Ejecutivo Al MinutoDocumento6 páginasResumen Ejecutivo Al Minutojennifer mercedesAinda não há avaliações
- Caso Clínico Esguince de TobilloDocumento5 páginasCaso Clínico Esguince de Tobillomercedes belloAinda não há avaliações
- Ramos - LL Trabajo de Dolor Lumbar.#1Documento97 páginasRamos - LL Trabajo de Dolor Lumbar.#1IvanArturoBerneSembiantiAinda não há avaliações
- Entrenamiento FuncionalDocumento5 páginasEntrenamiento FuncionalNazareth Varas AlonsoAinda não há avaliações
- GUIA. Modelo BiomecanicoDocumento8 páginasGUIA. Modelo BiomecanicoFirulais IndustriesAinda não há avaliações
- Control Control Motor El Corazon de La KinesiologiaDocumento15 páginasControl Control Motor El Corazon de La Kinesiologiaokaiusvesta100% (3)
- Facilitación Neuromuscular PropioceptivaDocumento13 páginasFacilitación Neuromuscular PropioceptivaLaura Paola Corredor NietoAinda não há avaliações
- Movilidad y FlexibilidadDocumento5 páginasMovilidad y FlexibilidadElUbaAinda não há avaliações
- Rubrica Evaluación PulmonarDocumento2 páginasRubrica Evaluación Pulmonarguzman_uroAinda não há avaliações
- Clase 3 Fundamentos de La Manipulacion y Movilizacion en TFDocumento9 páginasClase 3 Fundamentos de La Manipulacion y Movilizacion en TFKarolina Quintana HermosillaAinda não há avaliações
- Cadenas - Entrenamiento de Fuerza GimnasioDocumento14 páginasCadenas - Entrenamiento de Fuerza GimnasioAnonymous Qngpw2Ainda não há avaliações
- Cinesiterapia ActivaDocumento82 páginasCinesiterapia ActivaManiArenasAinda não há avaliações
- Importancia de Las Pruebas de Longitud MuscularDocumento1 páginaImportancia de Las Pruebas de Longitud MuscularRafael SalcedoAinda não há avaliações
- Guia 3 Practica de Bases y Principios DE METODOS FISOTERAPEUTICOS 2019-II 1 1Documento19 páginasGuia 3 Practica de Bases y Principios DE METODOS FISOTERAPEUTICOS 2019-II 1 1Boo3010Ainda não há avaliações
- La Fuerza Muscu LarDocumento13 páginasLa Fuerza Muscu Larjose gutierrezAinda não há avaliações
- FRACTURA HÚMERO PROXIMAL ADULTO - Karina SiguasDocumento24 páginasFRACTURA HÚMERO PROXIMAL ADULTO - Karina SiguasKarina Siguas Peixoto100% (1)
- Reeducacion de Las CervicalgiasDocumento19 páginasReeducacion de Las CervicalgiasMario OleaAinda não há avaliações
- Niveles de MaduracionDocumento10 páginasNiveles de MaduracionJosé HidalgoAinda não há avaliações
- Patologías Medulares Traumaticas o Degenerativas (TERMINADO)Documento11 páginasPatologías Medulares Traumaticas o Degenerativas (TERMINADO)kirara22Ainda não há avaliações
- Unidad Funcional de ColumnaDocumento32 páginasUnidad Funcional de ColumnaSarahi MolinaAinda não há avaliações
- Test de Movilidad Articular Examen Muscular de Las ExtremidadesDocumento216 páginasTest de Movilidad Articular Examen Muscular de Las ExtremidadesAngela Sophia BallesterosAinda não há avaliações
- A9 - AJE Diagrama de Gantt PDFDocumento3 páginasA9 - AJE Diagrama de Gantt PDFCarlos David Rodriguez AraujoAinda não há avaliações
- Imoc Tipo Cuadriplejia AtetoideDocumento4 páginasImoc Tipo Cuadriplejia Atetoidefisio_end100% (9)
- Diseño de Protesis Mioelectrica (TESIS)Documento145 páginasDiseño de Protesis Mioelectrica (TESIS)Gaby Barragan GonzalezAinda não há avaliações
- Lineas MiofascialesDocumento12 páginasLineas MiofascialesAlicia Lopez OrtizAinda não há avaliações
- La RodillaDocumento9 páginasLa RodillaKaren CáceresAinda não há avaliações
- Taller Miembro Inferior ScarletDocumento15 páginasTaller Miembro Inferior ScarletdiorlingyAinda não há avaliações
- Articulacion de La RodillaDocumento10 páginasArticulacion de La RodillaRobert Smith Beltran CarrilloAinda não há avaliações
- Trabajo de Investigación - Tobillo y PieDocumento23 páginasTrabajo de Investigación - Tobillo y PieELi RODRÍGUEZAinda não há avaliações
- Osteosíntesis y Endoprótesis Revisado Final ComparativoDocumento251 páginasOsteosíntesis y Endoprótesis Revisado Final ComparativoElmer Homero McAnonAinda não há avaliações
- Guiasap 019 EsgtobilloDocumento24 páginasGuiasap 019 EsgtobilloFRANCISCO JAVIERAinda não há avaliações
- Carpeta de Malambo 1 AñoDocumento25 páginasCarpeta de Malambo 1 AñoRo PereyraAinda não há avaliações
- Alteraciones Rotacionales en Miembros InferioresDocumento11 páginasAlteraciones Rotacionales en Miembros InferioresMayra Su100% (1)
- Drenaje Linfático Del Miembro Inferior ResumenDocumento2 páginasDrenaje Linfático Del Miembro Inferior ResumenViviana Villalba ConeoAinda não há avaliações
- MusloDocumento42 páginasMusloAlejandro Cortés EnzaldoAinda não há avaliações
- 9 HUESOS PELVIANOS HumeroDocumento30 páginas9 HUESOS PELVIANOS HumeroDaniela RomeroAinda não há avaliações
- Informe 2 - Potencia MuscularDocumento23 páginasInforme 2 - Potencia MuscularCESAR ALEJANDRO MEDINA VERTIZAinda não há avaliações
- Imagnes AcrchivosDocumento61 páginasImagnes AcrchivosAlisson AraujoAinda não há avaliações
- Clase 4Documento35 páginasClase 4Danny Andrés Fernández IparraguirreAinda não há avaliações
- Regiones de La RodillaDocumento2 páginasRegiones de La RodillaStefania Andrea Sorrentini67% (3)
- Fractura de Platillos TibialesDocumento12 páginasFractura de Platillos TibialesKoniAinda não há avaliações
- Neuroma de MortonDocumento6 páginasNeuroma de MortonAlexander Brocca HernandezAinda não há avaliações
- Muslo Usmp AnatoDocumento55 páginasMuslo Usmp AnatoRenzo RiveraAinda não há avaliações
- Traumatismo de Cadera y FemurDocumento46 páginasTraumatismo de Cadera y FemurPEDRO RODASAinda não há avaliações
- Tema 19 Caracteristicas Morfologicas de Femur y RotulaDocumento11 páginasTema 19 Caracteristicas Morfologicas de Femur y RotulaNatacha QuevedoAinda não há avaliações
- VENDAJE NEUROMUSCULAR Manual de Aplicaciones PrácticasDocumento5 páginasVENDAJE NEUROMUSCULAR Manual de Aplicaciones PrácticasEsmeralda CortesAinda não há avaliações
- Anatomía Miembro Superior e InferiorDocumento19 páginasAnatomía Miembro Superior e Inferiorangosama1101Ainda não há avaliações
- Escala Gait para Analisis de Marcha ImprDocumento7 páginasEscala Gait para Analisis de Marcha ImprVLAKORADOSAinda não há avaliações
- Biomecanica II - Protetica TT - Presentacion Prode - JairoDocumento242 páginasBiomecanica II - Protetica TT - Presentacion Prode - JairoGEORGE ANTONY SUARIQUE ARENASAinda não há avaliações
- Musculos Del Cuerpo (Johanna Padilla)Documento7 páginasMusculos Del Cuerpo (Johanna Padilla)johanna padillaAinda não há avaliações
- 2017 Sistema OsteomioarticularDocumento42 páginas2017 Sistema OsteomioarticularAngel CantilloAinda não há avaliações
- Evaluacion de Ciriax en Tobillo (Para Alumnos) PDFDocumento8 páginasEvaluacion de Ciriax en Tobillo (Para Alumnos) PDFMarianoborrachiaAinda não há avaliações
- Vascularizacion Miembro Inferior (Anatomia)Documento2 páginasVascularizacion Miembro Inferior (Anatomia)Dave Kroz67% (3)
- Artículo Exploración OrtopédicaDocumento4 páginasArtículo Exploración OrtopédicaSusana ReyesAinda não há avaliações
- Músculos Miembro InferiorDocumento4 páginasMúsculos Miembro InferiorErika DíazAinda não há avaliações
- Sist Aquileo Calcaneo PlantarDocumento9 páginasSist Aquileo Calcaneo PlantarManuel Estuardo MartínezAinda não há avaliações
- Resumen MusculosDocumento12 páginasResumen MusculosGonzalo Larraín LópezAinda não há avaliações
- MorfofisiologiaDocumento15 páginasMorfofisiologiaKaren Peña ColcasAinda não há avaliações
- Evaluaciones Articulares y Clinicas de La RodillaDocumento9 páginasEvaluaciones Articulares y Clinicas de La RodillaRaquel JiménezAinda não há avaliações