Você também pode gostar
- El Mejor Entrenamiento Con Mancuernas en Casa o El GimnasioDocumento20 páginasEl Mejor Entrenamiento Con Mancuernas en Casa o El GimnasioFredy Orlando HernándezAinda não há avaliações
- Taller 2 Cad-CamDocumento11 páginasTaller 2 Cad-CamFredy Orlando Hernández100% (1)
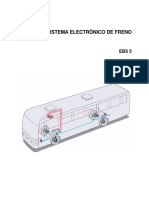
- Apostila Ebs 5 EspDocumento43 páginasApostila Ebs 5 EspAriel100% (1)
- NTC Iso 11464Documento14 páginasNTC Iso 11464Benoit100% (1)
- MF2 Sintaxis de Las Variables Tipos de Datos y Operaciones en Java PDFDocumento29 páginasMF2 Sintaxis de Las Variables Tipos de Datos y Operaciones en Java PDFjavier sepulvedaAinda não há avaliações
- Sistema Globalmente ArmonizadoDocumento30 páginasSistema Globalmente ArmonizadoFredy Orlando HernándezAinda não há avaliações
- Disponibilidad y Niveles de Contaminación de Cadmio y Plomo en Cuatro Suelos Colombianos. Un Análisis Del Riesgo A La Salud Humana y Al EcosistemaDocumento15 páginasDisponibilidad y Niveles de Contaminación de Cadmio y Plomo en Cuatro Suelos Colombianos. Un Análisis Del Riesgo A La Salud Humana y Al EcosistemaFredy Orlando HernándezAinda não há avaliações
- Plan de Gestión, Resultados y Mejora Continua 4Documento7 páginasPlan de Gestión, Resultados y Mejora Continua 4Fredy Orlando HernándezAinda não há avaliações
- DiseñoDocumento5 páginasDiseñoFredy Orlando HernándezAinda não há avaliações
- Informacion ProgramaDocumento4 páginasInformacion ProgramaFredy Orlando HernándezAinda não há avaliações
- Plan de Gestión, Resultados y Mejora Continua 1Documento10 páginasPlan de Gestión, Resultados y Mejora Continua 1Fredy Orlando HernándezAinda não há avaliações
- Análisis de La Pureza de H2O2 Por PermanganimetríaDocumento9 páginasAnálisis de La Pureza de H2O2 Por PermanganimetríaFredy Orlando HernándezAinda não há avaliações
- Plan de Gestión, Resultados y Mejora Continua 3Documento17 páginasPlan de Gestión, Resultados y Mejora Continua 3Fredy Orlando HernándezAinda não há avaliações
- Metabolismo de LípidosDocumento11 páginasMetabolismo de LípidosFredy Orlando HernándezAinda não há avaliações
- Análisis de La Pureza de Una Soda CáusticaDocumento9 páginasAnálisis de La Pureza de Una Soda CáusticaFredy Orlando HernándezAinda não há avaliações
- Plan de Gestión, Resultados y Mejora ContinuaDocumento3 páginasPlan de Gestión, Resultados y Mejora ContinuaFredy Orlando HernándezAinda não há avaliações
- ¿Como Visualizar Una Reacción Química?Documento2 páginas¿Como Visualizar Una Reacción Química?Fredy Orlando HernándezAinda não há avaliações
- Los Peores Negocios de La HistoriaDocumento3 páginasLos Peores Negocios de La HistoriaFredy Orlando HernándezAinda não há avaliações
- Análisis de Un Ácido PolipróticoDocumento13 páginasAnálisis de Un Ácido PolipróticoFredy Orlando HernándezAinda não há avaliações
- Claves para Practicar Cardio y Pesas de Forma CorrectaDocumento6 páginasClaves para Practicar Cardio y Pesas de Forma CorrectaFredy Orlando HernándezAinda não há avaliações
- Cuadro Comparativo Henry MartinezDocumento8 páginasCuadro Comparativo Henry MartinezHenry MartinezAinda não há avaliações
- ¿A Qué Hora Es Mejor Entrenar?Documento4 páginas¿A Qué Hora Es Mejor Entrenar?Fredy Orlando HernándezAinda não há avaliações
- Portafolio Diplomado en DocenciaDocumento8 páginasPortafolio Diplomado en DocenciaFredy Orlando HernándezAinda não há avaliações
- Tamaño Del ProyectoDocumento9 páginasTamaño Del ProyectoFredy Orlando HernándezAinda não há avaliações
- Gran ColombiaDocumento18 páginasGran ColombiaFredy Orlando HernándezAinda não há avaliações
- Elimina arrugas ojos con aceite coco y EDocumento5 páginasElimina arrugas ojos con aceite coco y EFredy Orlando HernándezAinda não há avaliações
- Indemnización despido sin causaDocumento5 páginasIndemnización despido sin causaFredy Orlando HernándezAinda não há avaliações
- Productos caseros automóvilDocumento4 páginasProductos caseros automóvilFredy Orlando HernándezAinda não há avaliações
- Estudio de Localización Del ProyectoDocumento13 páginasEstudio de Localización Del ProyectoFredy Orlando HernándezAinda não há avaliações
- Clase 16 El Presupuesto de IngresosDocumento8 páginasClase 16 El Presupuesto de IngresosFredy Orlando HernándezAinda não há avaliações
- InventarioDocumento15 páginasInventarioFredy Orlando HernándezAinda não há avaliações
- Características de Las Máquinas HerramientasDocumento13 páginasCaracterísticas de Las Máquinas HerramientasLeNin CaiCedoAinda não há avaliações
- Diseño de Muros de Corte en Edificaciones.Documento8 páginasDiseño de Muros de Corte en Edificaciones.Ruben VS100% (2)
- Transferencia de Calor-Tippens - M18Documento26 páginasTransferencia de Calor-Tippens - M18Federico LeonAinda não há avaliações
- Ejercicios Mezclas y Disoluciones 1º BachDocumento15 páginasEjercicios Mezclas y Disoluciones 1º BachJuaki Revuelta100% (1)
- Diagramas de Conexion de Lamparas IncandescentesDocumento37 páginasDiagramas de Conexion de Lamparas IncandescentesEder Galeana60% (5)
- Manual OzonoDocumento16 páginasManual OzonoElizabeth GetsuyōAinda não há avaliações
- Arranque Y-Delta motores trifásicosDocumento2 páginasArranque Y-Delta motores trifásicosKari ParedesAinda não há avaliações
- Tesis Materiales (Completa)Documento92 páginasTesis Materiales (Completa)Joselyn Lira100% (1)
- Integrales MultiplesDocumento19 páginasIntegrales MultiplesJosezhito Rojas DiburgaAinda não há avaliações
- Vigas IsostaticasDocumento5 páginasVigas IsostaticasmarcogarciarAinda não há avaliações
- Cinematica y DinamicaDocumento3 páginasCinematica y DinamicaJuan Camilo Suarez GallardoAinda não há avaliações
- Cuestionario para Prevencion de RiesgosDocumento2 páginasCuestionario para Prevencion de RiesgosJulioMancilla18100% (1)
- TP Ed FisicaDocumento4 páginasTP Ed FisicaGO PROAinda não há avaliações
- Ejercicios Unidad 2 CDIDocumento5 páginasEjercicios Unidad 2 CDIJose PonceAinda não há avaliações
- DirecciónAsistidaHidráulica PDFDocumento16 páginasDirecciónAsistidaHidráulica PDFJuan Padilla MunozAinda não há avaliações
- Modelamiento PilotesDocumento21 páginasModelamiento PilotesWermer Melgar GutierrezAinda não há avaliações
- Conceptos Básicos de ElectrónicaDocumento4 páginasConceptos Básicos de ElectrónicaGuillermina ScarAinda não há avaliações
- Magnetismo Mapa ConceptualDocumento1 páginaMagnetismo Mapa ConceptualAlexis Javier Mendez NietoAinda não há avaliações
- Materia de Fisica MateDocumento10 páginasMateria de Fisica MateMarianela QuesadaAinda não há avaliações
- Ecuacion de La Recta en El EspacioDocumento11 páginasEcuacion de La Recta en El EspacioFernando Sanchez LunaAinda não há avaliações
- DIAGNOSTICO 3ro.Documento22 páginasDIAGNOSTICO 3ro.Liliana Sabino AzamarAinda não há avaliações
- 01 PPT Secado - Parte2Documento142 páginas01 PPT Secado - Parte2discoduro2013Ainda não há avaliações
- Fundamentos de Mecánica de Suelos. Aspectos Teóricos y PrácticosDocumento492 páginasFundamentos de Mecánica de Suelos. Aspectos Teóricos y PrácticosJessica Fabiola Brett ZavalaAinda não há avaliações
- MatexDocumento4 páginasMatexAIRTON ANCHUNDIAAinda não há avaliações
- La Paradoja de SchrödingerDocumento4 páginasLa Paradoja de SchrödingerSabrina Nievas UmpierrezAinda não há avaliações
- RELÉ DE INTENSIDADDocumento2 páginasRELÉ DE INTENSIDADMcguffin GuffinAinda não há avaliações
- El Límite Máximo de Velocidad para Vehículos LivianosDocumento3 páginasEl Límite Máximo de Velocidad para Vehículos LivianosChinita Pao PillajoAinda não há avaliações
- Nte Inen 295Documento6 páginasNte Inen 295Amelia MonteroAinda não há avaliações