Você também pode gostar
- Ejercicios PDFDocumento68 páginasEjercicios PDFYean Carlos Silva Herrera0% (1)
- Coordenadas Cilíndricas PDFDocumento3 páginasCoordenadas Cilíndricas PDFTathie BolañoAinda não há avaliações
- Primera Evaluación - Revisión Del Intento1Documento27 páginasPrimera Evaluación - Revisión Del Intento1Lesly HerreraAinda não há avaliações
- Cinematica RectilineaDocumento13 páginasCinematica RectilineaFiorella VTAinda não há avaliações
- Cuestionario vectores 40Documento2 páginasCuestionario vectores 40Johnny SeguraAinda não há avaliações
- Superficie EquipotencialDocumento9 páginasSuperficie EquipotencialIngrid TufinioAinda não há avaliações
- Semana 6Documento21 páginasSemana 6shullerAinda não há avaliações
- Primer Lab Ecuaciones DiferemcialesDocumento6 páginasPrimer Lab Ecuaciones DiferemcialesAngel RojasAinda não há avaliações
- Radial y TransversalDocumento7 páginasRadial y Transversalaleixsbenjamin5121Ainda não há avaliações
- Deber2ParteII ProbabilidadDocumento3 páginasDeber2ParteII ProbabilidadEdison Espinel Sevilla33% (3)
- Ta - MetodosDocumento4 páginasTa - MetodosAlex GarridoAinda não há avaliações
- PRACTICA III UNIDAD - PiDocumento17 páginasPRACTICA III UNIDAD - PiHECTOR FRANCISCO ORE QUIROZAinda não há avaliações
- Ejercicios de CinematicaDocumento4 páginasEjercicios de Cinematicadan747Ainda não há avaliações
- Ejemplos de Calculos de Funciones de GreenDocumento6 páginasEjemplos de Calculos de Funciones de GreenimeqingenieriaAinda não há avaliações
- Taller 5 Mecanica NewtonianaDocumento2 páginasTaller 5 Mecanica NewtonianaMaria Cecilia FernandezAinda não há avaliações
- TrabajoDocumento11 páginasTrabajoAndrew Israel Q0% (1)
- Edo Examen 2BDocumento6 páginasEdo Examen 2BDãnnÿ'sŠtÿlësMHAinda não há avaliações
- Espacio muestral y combinacionesDocumento8 páginasEspacio muestral y combinacionescarlos quinteroAinda não há avaliações
- Practica 6 Electricidad y Magnetismo ESIQIE IPNDocumento5 páginasPractica 6 Electricidad y Magnetismo ESIQIE IPNPaola HernándezAinda não há avaliações
- Propiedades de Una Sección Mediante El Teorema de GreenDocumento7 páginasPropiedades de Una Sección Mediante El Teorema de GreenKevvin FrancisAinda não há avaliações
- Entrega IIDocumento1 páginaEntrega IISaira Báez0% (1)
- Vectores en El EspacioDocumento8 páginasVectores en El Espaciocesar miguel velasco chaconAinda não há avaliações
- Nucleo e ImagenDocumento9 páginasNucleo e ImagenRafa MolinaAinda não há avaliações
- Funciones de Valores VectorialesDocumento8 páginasFunciones de Valores VectorialesJúán Cárlos Garrochamba100% (1)
- Trabajo Fisica LLDocumento8 páginasTrabajo Fisica LLVanessa GilAinda não há avaliações
- ElectricaDocumento14 páginasElectricajoyceEvelynBenitezAinda não há avaliações
- Taller Unidad 1Documento8 páginasTaller Unidad 1Jhon Stiven TorresAinda não há avaliações
- Clase 04 - 2018Documento3 páginasClase 04 - 2018minastirAinda não há avaliações
- Práctica 9 ESTÁTICADocumento8 páginasPráctica 9 ESTÁTICAEdwinGuaman0% (1)
- La Ley de Distribución de Las Velocidades MolecularesDocumento9 páginasLa Ley de Distribución de Las Velocidades MolecularesVicky JancoAinda não há avaliações
- Asignación de Álgebra Lineal2Documento32 páginasAsignación de Álgebra Lineal2Alejo977x0% (1)
- Spline: Interpolación polinómica por tramosDocumento17 páginasSpline: Interpolación polinómica por tramosMiriam GarciaAinda não há avaliações
- Marco Teorico de VectoresDocumento3 páginasMarco Teorico de VectoresBryan Mayta VargasAinda não há avaliações
- Producto Cruz PDFDocumento56 páginasProducto Cruz PDFCarlos Murillo AguilarAinda não há avaliações
- 5 Ejercicios de Dominio de Funciones de Varias VariablesDocumento7 páginas5 Ejercicios de Dominio de Funciones de Varias VariablesFrankRojasMartinezAinda não há avaliações
- Solución A Problema 1.32 Fisica Universitaria Sears ZemanskyDocumento1 páginaSolución A Problema 1.32 Fisica Universitaria Sears Zemanskyphoenix eastwoodAinda não há avaliações
- Rotación de Un Objeto Rígido en Torno A Un Eje FijoDocumento7 páginasRotación de Un Objeto Rígido en Torno A Un Eje FijoAndres Castro FuentesAinda não há avaliações
- Sucesiones recurrentes geométricasDocumento29 páginasSucesiones recurrentes geométricasJose HumireAinda não há avaliações
- Movimiento en Una Dimensión Cap 2Documento35 páginasMovimiento en Una Dimensión Cap 2José Miguel50% (2)
- 9 Ley de Faraday PDFDocumento10 páginas9 Ley de Faraday PDFJeisson Andres Carvajal RamirezAinda não há avaliações
- Ejercicios resueltos de vectores y cinemáticaDocumento8 páginasEjercicios resueltos de vectores y cinemáticaMikk200% (1)
- Examen diagnóstico de campo eléctricoDocumento279 páginasExamen diagnóstico de campo eléctricoEricka JiménezAinda não há avaliações
- Ejercicio 2 de Cinematica de Cuerpos Rigidos Taller Julio 2018Documento3 páginasEjercicio 2 de Cinematica de Cuerpos Rigidos Taller Julio 2018Israel NavaAinda não há avaliações
- Matematica 3 1 1 1 2 1 3 1 4Documento25 páginasMatematica 3 1 1 1 2 1 3 1 4Rosa maria100% (1)
- PROPIEDADES PERIÓDICAS: ENERGÍA DE IONIZACIÓN, ELECTRONEGATIVIDAD Y ESTADO DE OXIDACIÓNDocumento3 páginasPROPIEDADES PERIÓDICAS: ENERGÍA DE IONIZACIÓN, ELECTRONEGATIVIDAD Y ESTADO DE OXIDACIÓNJuan SánchezAinda não há avaliações
- Ejercitario N 2Documento2 páginasEjercitario N 2Fabricio CascoAinda não há avaliações
- Ingenieria de Control Moderna Ogata 5a EdDocumento15 páginasIngenieria de Control Moderna Ogata 5a EdCesarCFAinda não há avaliações
- Aplicaciones Método Lu y DoolittleDocumento8 páginasAplicaciones Método Lu y DoolittleMoyka BlackwellAinda não há avaliações
- Clase 10 2021Documento38 páginasClase 10 2021MIRIAN ESTEFANIA SIMBA�A LLUMIQUINGAAinda não há avaliações
- Final Fisica Examenes y ActividadesDocumento71 páginasFinal Fisica Examenes y Actividadessalazfer14Ainda não há avaliações
- Campo DireccionalesDocumento4 páginasCampo DireccionaleskleverAinda não há avaliações
- Tarea 3Documento11 páginasTarea 3Sebastián PillajoAinda não há avaliações
- Movimiento de ProyectilDocumento9 páginasMovimiento de ProyectilSebastian ChavezAinda não há avaliações
- Actividad 0 CalculoDocumento15 páginasActividad 0 CalculoAnel Ximena De La Cruz AlvarezAinda não há avaliações
- 01 Mecánica Vectorial - Cinemática IDocumento73 páginas01 Mecánica Vectorial - Cinemática IDeni SanpedroAinda não há avaliações
- Vector Resultante (Método Del Polígono y Paralelogramo)Documento6 páginasVector Resultante (Método Del Polígono y Paralelogramo)Maricel Anahi Carbajal SantacruzAinda não há avaliações
- EstaticaDocumento32 páginasEstaticajOHANAAinda não há avaliações
- Vector EsDocumento13 páginasVector EsjhonAinda não há avaliações
- Problemas resueltos de electromagnetismo. Volumen I: ElectrostáticaNo EverandProblemas resueltos de electromagnetismo. Volumen I: ElectrostáticaAinda não há avaliações
- La Publicidad y Las Ciencias Humanas Analisis Pluridisciplinar de Anuncios Publicados en Periodicos y Revistas Espanoles Del Siglo XX y Comienzos Del XxiDocumento358 páginasLa Publicidad y Las Ciencias Humanas Analisis Pluridisciplinar de Anuncios Publicados en Periodicos y Revistas Espanoles Del Siglo XX y Comienzos Del XxiYolo MorenOAinda não há avaliações
- Taller 2Documento3 páginasTaller 2Ângîe QtterînAinda não há avaliações
- Volumen II Trazado y Diseño GeométricoDocumento49 páginasVolumen II Trazado y Diseño GeométricotopogcarlosAinda não há avaliações
- Factores Determinantes de La InflaciónDocumento1 páginaFactores Determinantes de La InflaciónÂngîe QtterînAinda não há avaliações
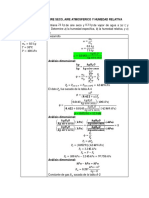
- Ejercicios de Aire SecoDocumento5 páginasEjercicios de Aire SecoJesus Rodolfo Moreno MurilloAinda não há avaliações
- Informe Playa La Honda ConsolidadoDocumento55 páginasInforme Playa La Honda ConsolidadoJuan Rafael Huamanchumo LeivaAinda não há avaliações
- Tema: Plegado de Lámina Utilizando Cilindros HidráulicosDocumento21 páginasTema: Plegado de Lámina Utilizando Cilindros Hidráulicosmaycol c. lopez100% (4)
- Diseño Sísmico Basado en Desplazamientos (DBD) - 2019Documento345 páginasDiseño Sísmico Basado en Desplazamientos (DBD) - 2019Anonymous 7c25tbs8RRAinda não há avaliações
- Analisis Del Diagrama de Esfuerzo y Deformacion de La Madera Tornillo-1Documento5 páginasAnalisis Del Diagrama de Esfuerzo y Deformacion de La Madera Tornillo-1Raquel Lozada ZarateAinda não há avaliações
- Energía CinéticaDocumento17 páginasEnergía CinéticaPaola Flores VidaurreAinda não há avaliações
- Clase 1, Estructura Atómica y Tabla PeriódicaDocumento71 páginasClase 1, Estructura Atómica y Tabla PeriódicaRonald Chen0% (1)
- SecadoDocumento18 páginasSecadoAlejandra Quintero VargasAinda não há avaliações
- Diseño de reactores químicos: Cinética de reacciones homogéneasDocumento5 páginasDiseño de reactores químicos: Cinética de reacciones homogéneasEduwin MamaniAinda não há avaliações
- 3 Guia 10 El Pendulo de WilberforceDocumento11 páginas3 Guia 10 El Pendulo de WilberforceSofia NiñoAinda não há avaliações
- Sistemas AbiertosDocumento3 páginasSistemas AbiertosGiulianaAinda não há avaliações
- 11 VigasDocumento41 páginas11 Vigasnixon marin vasquezAinda não há avaliações
- OPTICA GeometricaDocumento54 páginasOPTICA Geometricamady-85Ainda não há avaliações
- Coeficiente difusión CO2 aire 20°CDocumento5 páginasCoeficiente difusión CO2 aire 20°CJesús BuenoAinda não há avaliações
- Nubes y Tipos PrecipitaciónDocumento49 páginasNubes y Tipos Precipitaciónesteban100% (1)
- Equilibrio QuímicoDocumento8 páginasEquilibrio Químicomarianella tellezAinda não há avaliações
- Cálculo de estructuras por el método de bielas y tirantesDocumento45 páginasCálculo de estructuras por el método de bielas y tirantesBenjamin ChacónAinda não há avaliações
- SOSTENIBILIDADDocumento19 páginasSOSTENIBILIDADJhanira BendezuAinda não há avaliações
- DeformacionDocumento43 páginasDeformacionesteban rojas alcantaraAinda não há avaliações
- Flujo Termico en SoldaduraDocumento25 páginasFlujo Termico en SoldaduraRoberto DavisAinda não há avaliações
- Modelo Planetario de BohrDocumento9 páginasModelo Planetario de Bohrzahira moralesAinda não há avaliações
- Ejercicios - Deformación Elástica - Fuerza - RozamientoDocumento2 páginasEjercicios - Deformación Elástica - Fuerza - RozamientoRaúl González ParedesAinda não há avaliações
- DIAPOSITIVAS Cromatografias de GasesDocumento3 páginasDIAPOSITIVAS Cromatografias de GasesRusbel Edu Øystein VikernesAinda não há avaliações
- Esdeim Física 2020Documento2 páginasEsdeim Física 2020Gabriela GavilanesAinda não há avaliações
- Diseño Avanzado de Pavimentos IIDocumento28 páginasDiseño Avanzado de Pavimentos IIcalixto mamani chaniniAinda não há avaliações
- La Humedad Atmosférica y NubosidadDocumento10 páginasLa Humedad Atmosférica y NubosidadYesid CorreaAinda não há avaliações
- Examen MT Problemas Septiembre019-ResueltoDocumento7 páginasExamen MT Problemas Septiembre019-ResueltoIvan FelisAinda não há avaliações
- Pipíng & Stress Analysis Ref - Sofware Caesar II. 06 - 09 - 2017 Autor - Ing R L Morard - U T N 1 PDFDocumento90 páginasPipíng & Stress Analysis Ref - Sofware Caesar II. 06 - 09 - 2017 Autor - Ing R L Morard - U T N 1 PDFOswaldo Guerra100% (1)
- PDF Trans Manual Ax15 CompressDocumento160 páginasPDF Trans Manual Ax15 CompressJuan PérezAinda não há avaliações
- Problemas Ciclo RankineDocumento15 páginasProblemas Ciclo RankineCarlos Antonio Sonda ChacónAinda não há avaliações