Você também pode gostar
- 12.9.1 para EntregarDocumento6 páginas12.9.1 para EntregarJorge Luis B.P.Ainda não há avaliações
- 13.2.7-Packet-Tracer - Use-Ping-And-Traceroute-To-Test-Network-Connectivity - En.esDocumento8 páginas13.2.7-Packet-Tracer - Use-Ping-And-Traceroute-To-Test-Network-Connectivity - En.esJorge Luis B.P.Ainda não há avaliações
- Escriba Sus Respuestas Aquí.: PreguntasDocumento5 páginasEscriba Sus Respuestas Aquí.: PreguntasJorge Luis B.P.Ainda não há avaliações
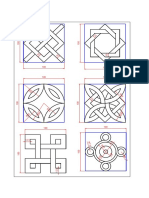
- PRACTICA INTRODUCCION-Layout1Documento1 páginaPRACTICA INTRODUCCION-Layout1Jorge Luis B.P.Ainda não há avaliações
- Configuracion Ccna1Documento5 páginasConfiguracion Ccna1Jorge Luis B.P.Ainda não há avaliações
- 20 AntenasOndaMediaDocumento115 páginas20 AntenasOndaMediaJorge Guerra SAinda não há avaliações
- Cerrar Un Símbolo Del SistemaDocumento4 páginasCerrar Un Símbolo Del SistemaJorge Luis B.P.Ainda não há avaliações
- Página 3 PDFDocumento2 páginasPágina 3 PDFJorge Luis B.P.Ainda não há avaliações
- PADRE RICO PADRE POBRE ResumenDocumento5 páginasPADRE RICO PADRE POBRE ResumenJorge Luis B.P.Ainda não há avaliações
- PADRE RICO PADRE POBRE ResumenDocumento5 páginasPADRE RICO PADRE POBRE ResumenJorge Luis B.P.Ainda não há avaliações
- 9 - Flujo de Caja 2019Documento21 páginas9 - Flujo de Caja 2019Jorge Luis B.P.Ainda não há avaliações
- DFBHRBDocumento4 páginasDFBHRBJorge Luis B.P.Ainda não há avaliações
- DFBHRBDocumento4 páginasDFBHRBJorge Luis B.P.Ainda não há avaliações
- Examen PDFDocumento1 páginaExamen PDFJorge Luis B.P.Ainda não há avaliações
- Revision 1Documento2 páginasRevision 1Sebastian Lopez VillanuevaAinda não há avaliações
- Instrum 2Documento91 páginasInstrum 2Jorge Luis B.P.Ainda não há avaliações
- Abel - Efecto de La Lluvia en Radioenlaces TerrestresDocumento13 páginasAbel - Efecto de La Lluvia en Radioenlaces TerrestresJorge Luis B.P.Ainda não há avaliações
- Resumen PmbookDocumento84 páginasResumen PmbookleninAinda não há avaliações
- Canon Radioeléctrico: Consideraciones para Su CalculoDocumento16 páginasCanon Radioeléctrico: Consideraciones para Su CalculoAlfred cas RamirezAinda não há avaliações
- Mis Experiencias en La BVLDocumento30 páginasMis Experiencias en La BVLJoel BautistaAinda não há avaliações
- Disturbios ElectricosDocumento30 páginasDisturbios ElectricosRenato Luna AguilarAinda não há avaliações
- BasesDocumento3 páginasBasesJorge Luis B.P.Ainda não há avaliações
- Guía 2 RedesDocumento2 páginasGuía 2 RedesJorge Luis B.P.Ainda não há avaliações
- IndiceDocumento6 páginasIndiceJorge Luis B.P.Ainda não há avaliações
- Micro SolucionarioDocumento1 páginaMicro SolucionarioJorge Luis B.P.Ainda não há avaliações
- Parcial ParteaDocumento2 páginasParcial ParteaJorge Luis B.P.Ainda não há avaliações
- IndiceDocumento6 páginasIndiceJorge Luis B.P.Ainda não há avaliações
- Capacidades Caloríficas Por El Método de Clément y DesormesDocumento6 páginasCapacidades Caloríficas Por El Método de Clément y DesormesFrank ChanduviAinda não há avaliações
- Proyecto YucumoDocumento122 páginasProyecto YucumoJose luis HuancaAinda não há avaliações
- Desnate Tks HorizontalesDocumento5 páginasDesnate Tks HorizontalesPocholo Mario Pineda ForeroAinda não há avaliações
- CV - Jesus David Gonzales Fiestas 3Documento1 páginaCV - Jesus David Gonzales Fiestas 3jose arroyo oliveraAinda não há avaliações
- Control de ascensor 4 plantas con PLCDocumento12 páginasControl de ascensor 4 plantas con PLCMichael ZavbAinda não há avaliações
- Practica e 1Documento6 páginasPractica e 1juan manuelAinda não há avaliações
- Analicen Las Fuentes de Poder A Disposición de Caruso para Dirigir A Los DecoradoresDocumento3 páginasAnalicen Las Fuentes de Poder A Disposición de Caruso para Dirigir A Los DecoradoresMagnolia CarreñoAinda não há avaliações
- Investigación Monitoreo y EvaluaciónDocumento3 páginasInvestigación Monitoreo y EvaluaciónAlexander SilvestreAinda não há avaliações
- Ta 1 DinámicaDocumento29 páginasTa 1 DinámicaCesar Efrain Abarca AlarconAinda não há avaliações
- Motoniveladora 163h Control HidraulicoDocumento2 páginasMotoniveladora 163h Control HidraulicoAdrian Fernando Astrada ContrerasAinda não há avaliações
- Práctica 1. ElectrotecniaDocumento20 páginasPráctica 1. ElectrotecniaAlex ThomasAinda não há avaliações
- Cuchara Trituradora Marca MontabertDocumento4 páginasCuchara Trituradora Marca MontabertOthoniel CastillaAinda não há avaliações
- Cómo aplicar tierra y arena en cuadros de menos deDocumento2 páginasCómo aplicar tierra y arena en cuadros de menos depablotriadeAinda não há avaliações
- Propiedades y ensayos de ladrillos de arcillaDocumento35 páginasPropiedades y ensayos de ladrillos de arcillaOscar Armando Mamani NinaAinda não há avaliações
- GPRS-308 Manual Del Usuario R5Documento20 páginasGPRS-308 Manual Del Usuario R5SisEleN Neuquen ArgentinaAinda não há avaliações
- Preguntas Quiz No 2Documento13 páginasPreguntas Quiz No 2Checho2301Ainda não há avaliações
- M Esmaltado PermanenteDocumento7 páginasM Esmaltado PermanenteSusanAinda não há avaliações
- Cálculo Mecánico II-material de Estudio-Semana 2-Unidad III-imperfecciones Estructurales en Los Metales y Deformación de Los MetalesDocumento24 páginasCálculo Mecánico II-material de Estudio-Semana 2-Unidad III-imperfecciones Estructurales en Los Metales y Deformación de Los MetalesMalu LeonAinda não há avaliações
- Movimiento Relativo en MecanismosDocumento16 páginasMovimiento Relativo en MecanismosAlisterVentoTapiaAinda não há avaliações
- Trabajo Final Jabon DepiladorDocumento8 páginasTrabajo Final Jabon DepiladorAnonymous bzABASP0% (1)
- Monografia Cadena de Suministros ProveedoresDocumento18 páginasMonografia Cadena de Suministros ProveedoresLuis Ricardo MoscosoAinda não há avaliações
- Electrónica Problemas Resueltos Cap 1BDocumento8 páginasElectrónica Problemas Resueltos Cap 1BPaula mAinda não há avaliações
- Actividad1 QuímicaDocumento12 páginasActividad1 QuímicaFiliberto100% (2)
- Quimica RedoxDocumento11 páginasQuimica RedoxAxel CazherAinda não há avaliações
- Diseño trituradora martillos reciclar botellasDocumento7 páginasDiseño trituradora martillos reciclar botellasLU MafaAinda não há avaliações
- Moldes fundiciónDocumento8 páginasMoldes fundiciónhack68Ainda não há avaliações
- The Ramp PhET LabDocumento3 páginasThe Ramp PhET LabEustaquio ReyesAinda não há avaliações
- Prueba de DinamicaDocumento10 páginasPrueba de DinamicaPedro Reynaldo Marin DominguezAinda não há avaliações
- Anexo 6 Especificaciones TecnicasDocumento22 páginasAnexo 6 Especificaciones TecnicasRONALTUTILLOAinda não há avaliações
- Informe de Ley de Enfriamiento PDFDocumento13 páginasInforme de Ley de Enfriamiento PDFgabrielaAinda não há avaliações