Você também pode gostar
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- Building LAMMPS Data Files With Car/mdf Files and The Msi2lmp UtilityDocumento9 páginasBuilding LAMMPS Data Files With Car/mdf Files and The Msi2lmp UtilityadilAinda não há avaliações
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- LASP Tutorial Xiamen AIworkshop 2019Documento70 páginasLASP Tutorial Xiamen AIworkshop 2019adilAinda não há avaliações
- European Polymer Journal: SciencedirectDocumento17 páginasEuropean Polymer Journal: SciencedirectadilAinda não há avaliações
- Composites Part B: SciencedirectDocumento6 páginasComposites Part B: SciencedirectadilAinda não há avaliações
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Weng2013 PDFDocumento36 páginasWeng2013 PDFadilAinda não há avaliações
- Nielsen Report - The New Trend Among Indonesia's NetizensDocumento20 páginasNielsen Report - The New Trend Among Indonesia's NetizensMarsha ImaniaraAinda não há avaliações
- TOK Assessed Student WorkDocumento10 páginasTOK Assessed Student WorkPeter Jun Park100% (1)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- BGP PDFDocumento100 páginasBGP PDFJeya ChandranAinda não há avaliações
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Pin Joint en PDFDocumento1 páginaPin Joint en PDFCicAinda não há avaliações
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- Registration Form - Synergies in Communication - 6th Edition - 2017-Drobot AnaDocumento3 páginasRegistration Form - Synergies in Communication - 6th Edition - 2017-Drobot AnaAna IrinaAinda não há avaliações
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Comsol - Guidelines For Modeling Rotating Machines in 3DDocumento30 páginasComsol - Guidelines For Modeling Rotating Machines in 3DtiberiupazaraAinda não há avaliações
- Disbursement VoucherDocumento7 páginasDisbursement VoucherDan MarkAinda não há avaliações
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- Advocating For Appropriate Educational ServicesDocumento32 páginasAdvocating For Appropriate Educational ServicesTransverse Myelitis AssociationAinda não há avaliações
- Detailed Lesson Plan (Lit)Documento19 páginasDetailed Lesson Plan (Lit)Shan QueentalAinda não há avaliações
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- Nptel Online-Iit KanpurDocumento1 páginaNptel Online-Iit KanpurRihlesh ParlAinda não há avaliações
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (345)
- 1.3.3 1.3.4 1.3.5 Input, Output & Storage Devices Workbook by Inqilab Patel PDFDocumento173 páginas1.3.3 1.3.4 1.3.5 Input, Output & Storage Devices Workbook by Inqilab Patel PDFRayyan MalikAinda não há avaliações
- Ccie R&s Expanded-BlueprintDocumento12 páginasCcie R&s Expanded-BlueprintAftab AlamAinda não há avaliações
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- General Mathematics SS3 2ND Term SchemeDocumento2 páginasGeneral Mathematics SS3 2ND Term Schemesam kaluAinda não há avaliações
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- Nicole Rapp Resume 3Documento2 páginasNicole Rapp Resume 3api-341337144Ainda não há avaliações
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- 5 Teacher Induction Program - Module 5Documento27 páginas5 Teacher Induction Program - Module 5LAZABELLE BAGALLON0% (1)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- 1013CCJ - T3 2019 - Assessment 2 - CompleteDocumento5 páginas1013CCJ - T3 2019 - Assessment 2 - CompleteGeorgie FriedrichsAinda não há avaliações
- AM-FM Reception TipsDocumento3 páginasAM-FM Reception TipsKrishna Ghimire100% (1)
- B205A TMA Project Spring 2021 - UpdatedDocumento6 páginasB205A TMA Project Spring 2021 - UpdatedIoan 23Ainda não há avaliações
- TMA GuideDocumento3 páginasTMA GuideHamshavathini YohoratnamAinda não há avaliações
- Oss Kpi SummaryDocumento7 páginasOss Kpi SummaryMohd FaizAinda não há avaliações
- Volvo HU 803Documento8 páginasVolvo HU 803GiegloAinda não há avaliações
- Company Profile 4Documento54 páginasCompany Profile 4Khuloud JamalAinda não há avaliações
- History of JavaDocumento3 páginasHistory of JavaKyra ParaisoAinda não há avaliações
- Modicon PLC CPUS Technical Details.Documento218 páginasModicon PLC CPUS Technical Details.TrbvmAinda não há avaliações
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
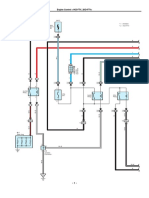
- Diagrama Hilux 1KD-2KD PDFDocumento11 páginasDiagrama Hilux 1KD-2KD PDFJeni100% (1)
- JOB Performer: Q .1: What Is Permit?Documento5 páginasJOB Performer: Q .1: What Is Permit?Shahid BhattiAinda não há avaliações
- Ce Project 1Documento7 páginasCe Project 1emmaAinda não há avaliações
- Unit 1: Power and Responsibility: 1. Important Leadership QualitiesDocumento6 páginasUnit 1: Power and Responsibility: 1. Important Leadership QualitiesTrần Thanh MinhAinda não há avaliações
- 3D Tetris Cake Evening 2Documento13 páginas3D Tetris Cake Evening 2Subham KarmakarAinda não há avaliações
- Birth Trauma and Post Traumatic Stress Disorder The Importance of Risk and ResilienceDocumento5 páginasBirth Trauma and Post Traumatic Stress Disorder The Importance of Risk and ResilienceMsRockPhantomAinda não há avaliações