Você também pode gostar
- Application of Diffracted Wave Analysis in 4D Seismic For Gas Leakage DetectionDocumento24 páginasApplication of Diffracted Wave Analysis in 4D Seismic For Gas Leakage DetectionFaisal AlonaiziAinda não há avaliações
- Wellplan: Ypfb ChacoDocumento18 páginasWellplan: Ypfb ChacobeymarAinda não há avaliações
- Cvl8309: Wind Engineering Lecture 1A: Introduction: Haitham Aboshosha, PHD PengDocumento56 páginasCvl8309: Wind Engineering Lecture 1A: Introduction: Haitham Aboshosha, PHD PengAhmed HamedAinda não há avaliações
- Mark Z. Jacobson Department of Civil & Environmental Engineering Stanford University Stanford, CA 94305-4020 Jacobson@stanford - EduDocumento66 páginasMark Z. Jacobson Department of Civil & Environmental Engineering Stanford University Stanford, CA 94305-4020 Jacobson@stanford - Eduhrishikesh.phatangareAinda não há avaliações
- Template (A)Documento3 páginasTemplate (A)Agus Setyo MuntoharAinda não há avaliações
- Put The Title of The Paper Here With Font Arial, Size 15pt, Centered, Length Up To 2 LinesDocumento3 páginasPut The Title of The Paper Here With Font Arial, Size 15pt, Centered, Length Up To 2 LinesAgus Setyo MuntoharAinda não há avaliações
- Nomtm2 1 2451261 - ADocumento5 páginasNomtm2 1 2451261 - Amohamed farmaanAinda não há avaliações
- Assignment 1 (2018)Documento3 páginasAssignment 1 (2018)Nthabeleng GaringAinda não há avaliações
- Datasheet - Am-3-7 - 8-CIRC-CRDocumento14 páginasDatasheet - Am-3-7 - 8-CIRC-CRkameshAinda não há avaliações
- MWD LWD 1648150845Documento50 páginasMWD LWD 1648150845Abdelrahman GallalAinda não há avaliações
- Agarwala, Nair - 2014 - STRUCTURAL RESPONSE OF A FLOATING RUNWAY EXCITED BY THE TAKING OFF OF AN AIRPLANE Abstract-AnnotatedDocumento8 páginasAgarwala, Nair - 2014 - STRUCTURAL RESPONSE OF A FLOATING RUNWAY EXCITED BY THE TAKING OFF OF AN AIRPLANE Abstract-AnnotatedTính Nguyễn TrungAinda não há avaliações
- Reporte de Puesta A TierraDocumento12 páginasReporte de Puesta A TierraJesusjaimebaez4094Ainda não há avaliações
- CrossHoleDownHole GPRDocumento70 páginasCrossHoleDownHole GPRKavan Gt12Ainda não há avaliações
- Introduction To Phased Array Ultrasonic Technology Applications 56-60Documento5 páginasIntroduction To Phased Array Ultrasonic Technology Applications 56-60Kevin HuangAinda não há avaliações
- TEMP2022101609381339Documento2 páginasTEMP2022101609381339JetjonAinda não há avaliações
- Mooring Pontoon calculation sheet: Input Meteo Data: Value: Angle (α) RAD: UnitDocumento1 páginaMooring Pontoon calculation sheet: Input Meteo Data: Value: Angle (α) RAD: UnitdeogmozyxAinda não há avaliações
- T2022-RVX8190 SCHLA I56 02 NewHDocumento3 páginasT2022-RVX8190 SCHLA I56 02 NewHOnyekachi JackAinda não há avaliações
- Mooring CalculationDocumento1 páginaMooring Calculationronachaif3191Ainda não há avaliações
- Open Channel Flow CalculationsDocumento7 páginasOpen Channel Flow CalculationsJohnstone Mutisya MwanthiAinda não há avaliações
- Fan 2016Documento10 páginasFan 2016Felipe MoralesAinda não há avaliações
- Introduction of Ultrasonic TestingDocumento70 páginasIntroduction of Ultrasonic TestingMAXX ENGINEERS100% (1)
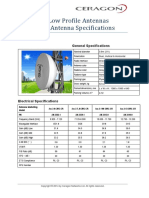
- Main Campus Niger Delta University, Bayelsa-BAY001 - 18G - 1+0 - 0.6m - 200Mbps - Link BudgetDocumento3 páginasMain Campus Niger Delta University, Bayelsa-BAY001 - 18G - 1+0 - 0.6m - 200Mbps - Link BudgetBalogun B EmmanuelAinda não há avaliações
- Refractive Index and Thickness Determinations Using A Dual-Path Mach-Zehnder Interferometer S.T. Lin, T.L. LinDocumento5 páginasRefractive Index and Thickness Determinations Using A Dual-Path Mach-Zehnder Interferometer S.T. Lin, T.L. LinTinhAinda não há avaliações
- Superimposed Dead Loads and Live Loads Load MagnitudeDocumento8 páginasSuperimposed Dead Loads and Live Loads Load MagnitudeLouieAinda não há avaliações
- MOORING CALCULATIONS (S)Documento6 páginasMOORING CALCULATIONS (S)halimAinda não há avaliações
- ASCE 7 - En14439-C25 Equivalent Wind SpeedDocumento2 páginasASCE 7 - En14439-C25 Equivalent Wind SpeedWesly CenterwallAinda não há avaliações
- 2007AS4100 Earth Atmosphere SpaceDocumento28 páginas2007AS4100 Earth Atmosphere Spacemirah kencanaAinda não há avaliações
- 8 - Radar 2Documento88 páginas8 - Radar 2Ali NasiriAinda não há avaliações
- Wind and Wave LoadsDocumento10 páginasWind and Wave LoadsMuhammad ArqamAinda não há avaliações
- The Acoustic Analogy - A Powerful Tool in Aeroacoustics With Emphasis On Jet Noise PredictionDocumento16 páginasThe Acoustic Analogy - A Powerful Tool in Aeroacoustics With Emphasis On Jet Noise PredictionKomarla DiaAinda não há avaliações
- TEMP2022061512282997Documento2 páginasTEMP2022061512282997JetjonAinda não há avaliações
- TITLE: Corona Effect: EhvacDocumento32 páginasTITLE: Corona Effect: EhvacReshi AdilAinda não há avaliações
- ICTTE - Belgrade 2016 - Paper 162Documento17 páginasICTTE - Belgrade 2016 - Paper 162sorina pacuraruAinda não há avaliações
- TEMP2022101223052392Documento2 páginasTEMP2022101223052392JetjonAinda não há avaliações
- Research On Signal of Field Monitor of 7220A Localizer Beacon Subsystem of ILSDocumento14 páginasResearch On Signal of Field Monitor of 7220A Localizer Beacon Subsystem of ILSĐào Nguyên TuếAinda não há avaliações
- PH Stability AnalysisDocumento46 páginasPH Stability AnalysisAkshay DuggalAinda não há avaliações
- Mooring Forces Port or STBD On Quay WWW - Thenavalarch.com Rev 1Documento10 páginasMooring Forces Port or STBD On Quay WWW - Thenavalarch.com Rev 1Mohamed Elfawal100% (1)
- TEMP2022121121253941Documento2 páginasTEMP2022121121253941JetjonAinda não há avaliações
- Project: Newinfill Inhouse DETAIL LBC: ZMDU - 0403 - ZMDU - 0181 08G - IP-20G - 800 - 1.2-1.8 - 4+0Documento1 páginaProject: Newinfill Inhouse DETAIL LBC: ZMDU - 0403 - ZMDU - 0181 08G - IP-20G - 800 - 1.2-1.8 - 4+0paris wijayaAinda não há avaliações
- BS6399 DubaiDocumento20 páginasBS6399 DubaiAnonymous 5VwQ0KC3Ainda não há avaliações
- SDSDDocumento18 páginasSDSDdheeraj SureshAinda não há avaliações
- TEMP2022121121273874Documento2 páginasTEMP2022121121273874JetjonAinda não há avaliações
- ML073240747 2Documento45 páginasML073240747 2Nyan Linn AungAinda não há avaliações
- Propagation and Attenuation Characteristics of Various Ground VibrationsDocumento12 páginasPropagation and Attenuation Characteristics of Various Ground VibrationsTony Christian Canahua ChoquezaAinda não há avaliações
- Ch2 BHS 2015Documento59 páginasCh2 BHS 2015wasim ali khanAinda não há avaliações
- Elimination of The Rayleigh Wave Effect On Low Strain Integrity Test Results (Part 2: Rayleigh Wave Elimination Technique)Documento6 páginasElimination of The Rayleigh Wave Effect On Low Strain Integrity Test Results (Part 2: Rayleigh Wave Elimination Technique)jinwook75Ainda não há avaliações
- TEMP2022061615081774Documento2 páginasTEMP2022061615081774JetjonAinda não há avaliações
- Check SCDocumento22 páginasCheck SCNhuVan NguyenAinda não há avaliações
- JEE Main DPYQ Full Syllabus PAPER-7Documento5 páginasJEE Main DPYQ Full Syllabus PAPER-7SumSetAinda não há avaliações
- Nota de Aplicacion Integrado Electronico SMDocumento2 páginasNota de Aplicacion Integrado Electronico SMMatias Resio CAinda não há avaliações
- Report Carga TierraDocumento11 páginasReport Carga TierraGIOVANNI ELIECER RIVERA RAMÍREZAinda não há avaliações
- Estimation of Bluff Body Transient Aerodynamics Using An Oscillating Model RigDocumento14 páginasEstimation of Bluff Body Transient Aerodynamics Using An Oscillating Model RigŞtefan NeacşuAinda não há avaliações
- ENERGIA EÓLICA - v5 TechnicalDocumento68 páginasENERGIA EÓLICA - v5 TechnicalfelipeAinda não há avaliações
- Wind Resource PDFDocumento21 páginasWind Resource PDFreysAinda não há avaliações
- LNG Water CurtainDocumento20 páginasLNG Water CurtainDera ChoanjiAinda não há avaliações
- TEMP2022101223060766Documento2 páginasTEMP2022101223060766JetjonAinda não há avaliações
- Grp-4 Exprt8 Lab-ReportDocumento32 páginasGrp-4 Exprt8 Lab-ReportTango FoxtrotAinda não há avaliações
- LBs of 1037, 9230, 9223, 1011 & 9319Documento6 páginasLBs of 1037, 9230, 9223, 1011 & 9319Mohammad Zubair SiddiquiAinda não há avaliações
- How To Model Walls in EtabsDocumento15 páginasHow To Model Walls in EtabsnfaayedAinda não há avaliações
- Conversion Procedures For ASCE7-5 and ASCE7-10Documento2 páginasConversion Procedures For ASCE7-5 and ASCE7-10nfaayedAinda não há avaliações
- Cube Paper Evaluation of Various Turbulence Models in Predicting AirflowDocumento27 páginasCube Paper Evaluation of Various Turbulence Models in Predicting AirflownfaayedAinda não há avaliações
- 1 Modeling of Shear Walls For Non Linear and Pushover Analysis of Tall BuildingsDocumento64 páginas1 Modeling of Shear Walls For Non Linear and Pushover Analysis of Tall BuildingsHareen Cherukuru100% (1)
- Thesis Estimation of Drag Coefficient of Various Structures Using Computational Fluid DynamicDocumento214 páginasThesis Estimation of Drag Coefficient of Various Structures Using Computational Fluid DynamicnfaayedAinda não há avaliações
- https1 Link How Etabs Generate EQDocumento10 páginashttps1 Link How Etabs Generate EQnfaayedAinda não há avaliações
- How To Do Wind Model BuildingDocumento33 páginasHow To Do Wind Model BuildingnfaayedAinda não há avaliações
- Strengthening Proposals of Timber Beams in HistoricalDocumento18 páginasStrengthening Proposals of Timber Beams in HistoricalnfaayedAinda não há avaliações
- 0068 C01 PDFDocumento66 páginas0068 C01 PDFnfaayedAinda não há avaliações
- The Effect of Different Retrofit Techniques For Shear Walls On The SeismicDocumento39 páginasThe Effect of Different Retrofit Techniques For Shear Walls On The SeismicnfaayedAinda não há avaliações
- Seismic Assessment and Restoration Measures For A Historic Masonry MinareDocumento31 páginasSeismic Assessment and Restoration Measures For A Historic Masonry MinarenfaayedAinda não há avaliações
- Glass Panels Failure in Point Fixed Glazing SystemsDocumento150 páginasGlass Panels Failure in Point Fixed Glazing SystemsnfaayedAinda não há avaliações
- Comparison Wind and EQ LoadsDocumento15 páginasComparison Wind and EQ LoadsnfaayedAinda não há avaliações
- Comparison Wind and EQ Loads PDFDocumento15 páginasComparison Wind and EQ Loads PDFnfaayedAinda não há avaliações
- Liq-Upload 3 PDFDocumento79 páginasLiq-Upload 3 PDFnfaayedAinda não há avaliações
- Rc-Ductility Due To EQDocumento303 páginasRc-Ductility Due To EQnfaayed100% (1)
- Mdof23-L-V16-Red 2Documento113 páginasMdof23-L-V16-Red 2nfaayedAinda não há avaliações
- Ductility-Steel 5Documento183 páginasDuctility-Steel 5nfaayedAinda não há avaliações
- Earthquake Tip: What Causes Earthquakes?Documento48 páginasEarthquake Tip: What Causes Earthquakes?Fayaz Habeeb100% (1)
- Liq-Upload 3 PDFDocumento79 páginasLiq-Upload 3 PDFnfaayedAinda não há avaliações
- Wind Properties (II)Documento15 páginasWind Properties (II)nfaayedAinda não há avaliações
- Ex 150x12x15 Building Egypt (III)Documento4 páginasEx 150x12x15 Building Egypt (III)nfaayedAinda não há avaliações
- Conversion Procedures For ASCE7-5 and ASCE7-10Documento2 páginasConversion Procedures For ASCE7-5 and ASCE7-10nfaayedAinda não há avaliações
- Long Span StructureDocumento94 páginasLong Span StructureMicron Macron100% (5)
- Plastic Hinging of Structural Wall Elements Under Lateral LoadingDocumento11 páginasPlastic Hinging of Structural Wall Elements Under Lateral LoadingnfaayedAinda não há avaliações
- How To 1rDocumento239 páginasHow To 1rnfaayedAinda não há avaliações
- Buckling Load Estimation of Cold-Formed AnglesDocumento12 páginasBuckling Load Estimation of Cold-Formed AnglesnfaayedAinda não há avaliações
- Modelling of Pile Jacking Into Sandy Soil Considering Large Deformation Behaviour Using Advanced Numerical Approach - Coupled Eulerian Lagrangian Method (CEL)Documento12 páginasModelling of Pile Jacking Into Sandy Soil Considering Large Deformation Behaviour Using Advanced Numerical Approach - Coupled Eulerian Lagrangian Method (CEL)nfaayedAinda não há avaliações
- 3D - Analysis of Piled Raft Under Vertical and Earthquake LoadsDocumento16 páginas3D - Analysis of Piled Raft Under Vertical and Earthquake LoadsnfaayedAinda não há avaliações
- Physics - WorkDocumento11 páginasPhysics - WorkMohammed HassaanAinda não há avaliações
- Light and Architectural Lighting SystemsDocumento17 páginasLight and Architectural Lighting SystemsCrystal Kaye CortezAinda não há avaliações
- Chapter 11Documento61 páginasChapter 11Haziq RoslanAinda não há avaliações
- Mscphy-12 (M.Sc. Physics) First Year Examination-2015Documento4 páginasMscphy-12 (M.Sc. Physics) First Year Examination-2015Manendra ChaudhryAinda não há avaliações
- Phasor: Phasor Diagram of A Sinusoidal WaveformDocumento9 páginasPhasor: Phasor Diagram of A Sinusoidal WaveformWaqar AliAinda não há avaliações
- 11th Chemistry Important 5 Marks QuestionsDocumento3 páginas11th Chemistry Important 5 Marks QuestionsHackerzillaAinda não há avaliações
- PML Heat ExchangeDocumento64 páginasPML Heat ExchangeMalaak_wAinda não há avaliações
- Science Reviewer by Ira EspinaDocumento7 páginasScience Reviewer by Ira EspinaIra EspinaAinda não há avaliações
- Transducers Instrumentation: Second EditionDocumento11 páginasTransducers Instrumentation: Second EditionkrlalitAinda não há avaliações
- (PAPER) Benz T., Schwab R., & Vermeer P. (2009) Small-Strain Stiffness in Geotechnical Analyses (Bautechnik, 86 (S1), 16-27)Documento12 páginas(PAPER) Benz T., Schwab R., & Vermeer P. (2009) Small-Strain Stiffness in Geotechnical Analyses (Bautechnik, 86 (S1), 16-27)O SAinda não há avaliações
- Lecture 2b - Temperature-Dependent Term of A Rate Equation PDFDocumento4 páginasLecture 2b - Temperature-Dependent Term of A Rate Equation PDFPAMELA TEJADAAinda não há avaliações
- (Gate 2001: 2 Marks) Ans. (D) Since The Diode Is Forward Biased, It Is Taken As Short Circuit. Writing KCLDocumento3 páginas(Gate 2001: 2 Marks) Ans. (D) Since The Diode Is Forward Biased, It Is Taken As Short Circuit. Writing KCLSiva GuruAinda não há avaliações
- Maxwell's Equations: and God Said, "Let There Be Light" and There Was Light ! - GenesisDocumento13 páginasMaxwell's Equations: and God Said, "Let There Be Light" and There Was Light ! - GenesisYash KalaAinda não há avaliações
- Chapter 2Documento19 páginasChapter 2TearlëşşSufíåñAinda não há avaliações
- Energy and Exergy Analysis of A Simple Gas Turbine Cycle With Wet CompressionDocumento11 páginasEnergy and Exergy Analysis of A Simple Gas Turbine Cycle With Wet CompressionKrishnaDuttPandeyKdpAinda não há avaliações
- Stiffness Matrix Based Form-Finding Method of Tensegrity Structures-Zhang & Liyuan 2014Documento14 páginasStiffness Matrix Based Form-Finding Method of Tensegrity Structures-Zhang & Liyuan 2014Angel SullyvanAinda não há avaliações
- Radioactive Decay MathematicalDocumento3 páginasRadioactive Decay MathematicalJono WojciechowskiAinda não há avaliações
- Binary 6Documento6 páginasBinary 6حسين كاظم ياسينAinda não há avaliações
- List of Books ScribdDocumento4 páginasList of Books Scribdkultardeep0% (1)
- Ferranti EffectDocumento2 páginasFerranti EffectVaibhav Singh RajputAinda não há avaliações
- Pearson Physics: Prepared by Chris ChiaverinaDocumento82 páginasPearson Physics: Prepared by Chris ChiaverinaMark Niño JavierAinda não há avaliações
- Chem Final Notes UsydDocumento5 páginasChem Final Notes UsydRobs0% (1)
- Proposed Two Storey Residence ReportDocumento27 páginasProposed Two Storey Residence ReportchorgedAinda não há avaliações
- Science 1 10th Answer Chapter 567Documento47 páginasScience 1 10th Answer Chapter 567Arti GuptaAinda não há avaliações
- P5 3B Gutierrez JohnPaulDocumento5 páginasP5 3B Gutierrez JohnPauljp gutierrezAinda não há avaliações
- How Induction Cookers WorkDocumento2 páginasHow Induction Cookers WorkKryzler Kaye100% (1)
- 3.1-3.2 Laplace - S EquationDocumento15 páginas3.1-3.2 Laplace - S EquationCargo86Ainda não há avaliações
- 3ph IM - Freq Emf CT and PF - ProblemsDocumento19 páginas3ph IM - Freq Emf CT and PF - Problemskarthikeyan249Ainda não há avaliações
- People Physics BookDocumento220 páginasPeople Physics BookBlacksacerdoteAinda não há avaliações
- Robotics EngineeringDocumento3 páginasRobotics Engineeringhiren_mistry55Ainda não há avaliações