Você também pode gostar
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- 4th Sept - Marathon Series Lecture 8 - General AwarenessDocumento208 páginas4th Sept - Marathon Series Lecture 8 - General AwarenessManbir ArinAinda não há avaliações
- Information Systems and Supply Chain ManagementDocumento2 páginasInformation Systems and Supply Chain Managementvipinkandpal86Ainda não há avaliações
- СV Nestor RodriguezDocumento28 páginasСV Nestor RodriguezKate BrownAinda não há avaliações
- Alchemy of The HeartDocumento7 páginasAlchemy of The HeartAbdul RahimAinda não há avaliações
- Full Project LibraryDocumento77 páginasFull Project LibraryChala Geta0% (1)
- Mission and VisionDocumento5 páginasMission and VisionsanjedAinda não há avaliações
- Session 1Documento18 páginasSession 1Akash GuptaAinda não há avaliações
- How Chargers WorkDocumento21 páginasHow Chargers WorkMuhammad Irfan RiazAinda não há avaliações
- Maths Formulas For IGCSEDocumento2 páginasMaths Formulas For IGCSEHikma100% (1)
- ..Product CatalogueDocumento56 páginas..Product Catalogue950 911Ainda não há avaliações
- Project Quality Plan (JFJS-788)Documento18 páginasProject Quality Plan (JFJS-788)mominAinda não há avaliações
- Tutorial Chapter 5 - Power System ControlDocumento2 páginasTutorial Chapter 5 - Power System ControlsahibAinda não há avaliações
- Central University of Karnataka: Entrance Examinations Results 2016Documento4 páginasCentral University of Karnataka: Entrance Examinations Results 2016Saurabh ShubhamAinda não há avaliações
- China Training WCDMA 06-06Documento128 páginasChina Training WCDMA 06-06ryanz2009Ainda não há avaliações
- NHD Process PaperDocumento2 páginasNHD Process Paperapi-203024952100% (1)
- AISOY1 KiK User ManualDocumento28 páginasAISOY1 KiK User ManualLums TalyerAinda não há avaliações
- KLA28 ProductsapplicationpresetDocumento2 páginasKLA28 ProductsapplicationpresetcarxmozAinda não há avaliações
- Mecha World Compendium Playbooks BWDocumento12 páginasMecha World Compendium Playbooks BWRobson Alves MacielAinda não há avaliações
- Application of The Strain Energy To Estimate The Rock Load in Non-Squeezing Ground ConditionDocumento17 páginasApplication of The Strain Energy To Estimate The Rock Load in Non-Squeezing Ground ConditionAmit Kumar GautamAinda não há avaliações
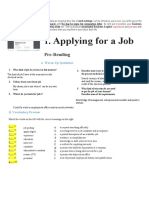
- Applying For A Job: Pre-ReadingDocumento5 páginasApplying For A Job: Pre-ReadingDianitta MaciasAinda não há avaliações
- Circular ConvolutionDocumento3 páginasCircular Convolutionseeksudhanshu1Ainda não há avaliações
- Test 2-Module 1 12-10-2017: VocabularyDocumento2 páginasTest 2-Module 1 12-10-2017: VocabularySzabolcs Kelemen100% (1)
- Gis Data Creation in Bih: Digital Topographic Maps For Bosnia and HerzegovinaDocumento9 páginasGis Data Creation in Bih: Digital Topographic Maps For Bosnia and HerzegovinaGrantAinda não há avaliações
- 8 A - 1615864446 - 1605148379 - 1579835163 - Topic - 8.A.EffectiveSchoolsDocumento9 páginas8 A - 1615864446 - 1605148379 - 1579835163 - Topic - 8.A.EffectiveSchoolsYasodhara ArawwawelaAinda não há avaliações
- 2nd Term Project 4º Eso Beauty Canons 2015-16 DefinitivoDocumento2 páginas2nd Term Project 4º Eso Beauty Canons 2015-16 DefinitivopasferacosAinda não há avaliações
- Derivational and Inflectional Morpheme in English LanguageDocumento11 páginasDerivational and Inflectional Morpheme in English LanguageEdificator BroAinda não há avaliações
- Is 2 - 2000 Rules For Rounded Off For Numericals PDFDocumento18 páginasIs 2 - 2000 Rules For Rounded Off For Numericals PDFbala subramanyamAinda não há avaliações
- PostScript Quick ReferenceDocumento2 páginasPostScript Quick ReferenceSneetsher CrispyAinda não há avaliações
- Img 20150510 0001Documento2 páginasImg 20150510 0001api-284663984Ainda não há avaliações
- JCP4 XDOBursting EngineDocumento13 páginasJCP4 XDOBursting Enginesubhash221103Ainda não há avaliações