Você também pode gostar
- Electrical Technology Volume I Basic Electrical EngineeringDocumento36 páginasElectrical Technology Volume I Basic Electrical EngineeringsantoshpbkAinda não há avaliações
- Basic Electrical Lecture Notes: Faris Elecrical Engg Department Al-Ameen Engg College, ShoranurDocumento16 páginasBasic Electrical Lecture Notes: Faris Elecrical Engg Department Al-Ameen Engg College, Shoranurvpzfaris100% (2)
- CV - Electrical Engineer-Design-VigneshDocumento2 páginasCV - Electrical Engineer-Design-VigneshvigneshAinda não há avaliações
- Electrical Power Systems - C. L. WadhwaDocumento120 páginasElectrical Power Systems - C. L. WadhwaMayank Rawal0% (1)
- Industrial AC Machines DOL StarterDocumento20 páginasIndustrial AC Machines DOL Starterhrishikesh barveAinda não há avaliações
- Gamatronic - Modular UPS SystemsDocumento5 páginasGamatronic - Modular UPS SystemsFELIXDEJAinda não há avaliações
- 221 Townsend Full NoteDocumento12 páginas221 Townsend Full NoteKhairul AkmalAinda não há avaliações
- Installation and Estimation of Electrical Load PDFDocumento59 páginasInstallation and Estimation of Electrical Load PDFMohd AliAinda não há avaliações
- Electronics Chapter 3Documento34 páginasElectronics Chapter 3venkeekuAinda não há avaliações
- 200 Top Electrical Q&ans PDFDocumento26 páginas200 Top Electrical Q&ans PDFRajesh MachchaAinda não há avaliações
- Basic Motor Control 1600459952. PrintDocumento189 páginasBasic Motor Control 1600459952. PrintrodinooAinda não há avaliações
- Objective Electrical Engineering by Santosh Kumar PDFDocumento225 páginasObjective Electrical Engineering by Santosh Kumar PDFRizwan Ali100% (1)
- Advisory Electrical Engineering Book PDFDocumento391 páginasAdvisory Electrical Engineering Book PDFArsalan MalikAinda não há avaliações
- Electrical Installations and Systems EI449362 NVQ2 C14 P331 388Documento58 páginasElectrical Installations and Systems EI449362 NVQ2 C14 P331 388robpeter2425Ainda não há avaliações
- Electrical Interview QuestionsDocumento3 páginasElectrical Interview QuestionsAndile CeleAinda não há avaliações
- Exam Success Iee Wiring Regulations 2382 12 PDFDocumento2 páginasExam Success Iee Wiring Regulations 2382 12 PDFYourdj0% (2)
- Calculate Size of Main ELCB & Brach MCB of Distribution Box - Electrical Notes & Articles PDFDocumento8 páginasCalculate Size of Main ELCB & Brach MCB of Distribution Box - Electrical Notes & Articles PDFYUVA SKILL ACEAinda não há avaliações
- Godown Wiring - MechatroficeDocumento2 páginasGodown Wiring - MechatroficeKush SharmaAinda não há avaliações
- 0 Introduction To Electrical System Design (Lec)Documento12 páginas0 Introduction To Electrical System Design (Lec)EdryanPoAinda não há avaliações
- Panel Load CalculationDocumento5 páginasPanel Load Calculationkaliman2010Ainda não há avaliações
- SSC Je Electrical 24 03 2021 Shift 2 16Documento11 páginasSSC Je Electrical 24 03 2021 Shift 2 16madhavi lathaAinda não há avaliações
- Total: End Posting ExaminationDocumento9 páginasTotal: End Posting ExaminationStar CruiseAinda não há avaliações
- Datasheet: SF-CPV-205 High Efficiency Concentrator PV PanelDocumento2 páginasDatasheet: SF-CPV-205 High Efficiency Concentrator PV PanelsaaskinsAinda não há avaliações
- Why Do We Use Star Connection On Transmission and Distribution On DeltaDocumento2 páginasWhy Do We Use Star Connection On Transmission and Distribution On DeltaAmirSaeedAinda não há avaliações
- 100 TOP MOST Electrical Engineering MaterialsDocumento17 páginas100 TOP MOST Electrical Engineering MaterialsPrateek DevAinda não há avaliações
- Phasor Representation of ACDocumento21 páginasPhasor Representation of ACKavitha NaikAinda não há avaliações
- PNPNDocumento14 páginasPNPNJulio Gabriel AseronAinda não há avaliações
- ViZn Energy Systems Datasheet GS200Documento2 páginasViZn Energy Systems Datasheet GS200kanggg_ku3014Ainda não há avaliações
- AutoCAD Course SyllabusDocumento8 páginasAutoCAD Course SyllabusGabriela MoreAinda não há avaliações
- Single Line Diagram of Power System - Circuit GlobeDocumento7 páginasSingle Line Diagram of Power System - Circuit GlobeMohammad HamamdAinda não há avaliações
- Exp. 6 Three PH HW Uncontrolled RectifierDocumento4 páginasExp. 6 Three PH HW Uncontrolled Rectifierfaisal140Ainda não há avaliações
- Assignment Analog Digital ElectronicDocumento3 páginasAssignment Analog Digital ElectronicShehzadtaj0% (1)
- 2 Way Switch Wiring DiagramDocumento2 páginas2 Way Switch Wiring Diagrama_j_sanyal259Ainda não há avaliações
- MCQ Electronics ElectricalsDocumento149 páginasMCQ Electronics ElectricalsShamsul Haq NtcAinda não há avaliações
- Internship KsebDocumento97 páginasInternship KsebVishnu VijayaramanAinda não há avaliações
- Data Requirements For Electrical Load CalculationDocumento10 páginasData Requirements For Electrical Load CalculationAsad KhanAinda não há avaliações
- Free EbookDocumento41 páginasFree EbookestebanAinda não há avaliações
- Electrical Objective Questions With Answers - Power Electronics ProblemsDocumento3 páginasElectrical Objective Questions With Answers - Power Electronics Problemsdigital2000Ainda não há avaliações
- Current Transformer: Profile No.: 273 NIC Code: 27102Documento14 páginasCurrent Transformer: Profile No.: 273 NIC Code: 27102Rama SubrahmanyamAinda não há avaliações
- Electrical Protective EquipmentDocumento17 páginasElectrical Protective EquipmentKhageswar SamalAinda não há avaliações
- Electrical Engineering SlidesDocumento12 páginasElectrical Engineering SlidessbatatiAinda não há avaliações
- Diode Circuits AnalysisDocumento9 páginasDiode Circuits AnalysisLavdim Xhelili100% (1)
- Calculate The Suitable Capacitor Size in Farads & kVAR For PF ImprovementDocumento4 páginasCalculate The Suitable Capacitor Size in Farads & kVAR For PF ImprovementmaungsoekhinAinda não há avaliações
- Modular UPS SystemsDocumento2 páginasModular UPS Systemssarang11Ainda não há avaliações
- Basic Electrical & Electronics Interview Questions & AnswersDocumento4 páginasBasic Electrical & Electronics Interview Questions & AnswersJackie JonesAinda não há avaliações
- CH 1 - Introduction Electrical Installation Design 2010-2011 A4Documento10 páginasCH 1 - Introduction Electrical Installation Design 2010-2011 A4Mohd Farkhan Abu BakarAinda não há avaliações
- Questions On DiodesDocumento40 páginasQuestions On Diodeskibrom atsbha100% (1)
- Books PDFDocumento1 páginaBooks PDFDivanshu InsaAinda não há avaliações
- Lm3914 Base Soil Humidity TesterDocumento3 páginasLm3914 Base Soil Humidity TesterVagish PandeyAinda não há avaliações
- 07 DBR Lighting PDFDocumento54 páginas07 DBR Lighting PDFJohn Son GAinda não há avaliações
- 50 Most Important Question From Transformer Asked in PSU Exam - Gate2018onlineDocumento6 páginas50 Most Important Question From Transformer Asked in PSU Exam - Gate2018onlineppAinda não há avaliações
- 7.short Circuit CalculationsDocumento14 páginas7.short Circuit Calculationskvramanan_1Ainda não há avaliações
- Motor Starter Components Finder - ATS48C14QDocumento7 páginasMotor Starter Components Finder - ATS48C14QMateus HenriqueAinda não há avaliações
- 39th ANC IIEE CSC 12th PEC Quiz Show 1st CIENSCIA Quiz Show Concept Paper 1Documento2 páginas39th ANC IIEE CSC 12th PEC Quiz Show 1st CIENSCIA Quiz Show Concept Paper 1Edrielle Valdez100% (1)
- Lecture 10Documento26 páginasLecture 10ansat5.ansatAinda não há avaliações
- Chap2 Beta1313 Part IDocumento85 páginasChap2 Beta1313 Part ISimson DianAinda não há avaliações
- Current, Voltage & ResistanceDocumento48 páginasCurrent, Voltage & Resistancehassanaayan03Ainda não há avaliações
- Topic 1 DC Network TheoremsDocumento76 páginasTopic 1 DC Network TheoremsASHISH KUMARAinda não há avaliações
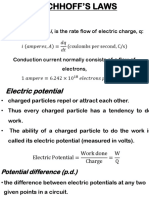
- Kirchhoff's LawsDocumento31 páginasKirchhoff's Lawsezrah ogoriAinda não há avaliações
- SKANDIX - Order EditDocumento2 páginasSKANDIX - Order EditmehAinda não há avaliações
- Server Side - Java - Using Rmi With Apache JservDocumento16 páginasServer Side - Java - Using Rmi With Apache JservTotoAlipioAinda não há avaliações
- Reynolds EqnDocumento27 páginasReynolds EqnSuman KhanalAinda não há avaliações
- Namibian Diplomatic Missions Abroad 2011Documento6 páginasNamibian Diplomatic Missions Abroad 2011Milton LouwAinda não há avaliações
- Seismic Data AcquisitionDocumento14 páginasSeismic Data Acquisitionjoao kiala100% (1)
- Ict Designation FormDocumento3 páginasIct Designation FormAloha Mae ImbagAinda não há avaliações
- David Beard Composer CV ShortDocumento2 páginasDavid Beard Composer CV ShortEhsan KarimyAinda não há avaliações
- TCE BE EEE RulesandRegulationsDocumento509 páginasTCE BE EEE RulesandRegulationsAplieAinda não há avaliações
- InternshipDocumento14 páginasInternshipMohammed Shaheeruddin0% (1)
- MUDPRO Plus Advanced Mud ReportingDocumento2 páginasMUDPRO Plus Advanced Mud ReportinglarasAinda não há avaliações
- Sports Collection CatalogueDocumento31 páginasSports Collection CataloguesitarazmiAinda não há avaliações
- MGT104 Assignment 3Documento11 páginasMGT104 Assignment 3Lê Hữu Nam0% (1)
- Harga Jual Genset Deutz GermanyDocumento2 páginasHarga Jual Genset Deutz GermanyAgung SetiawanAinda não há avaliações
- Case StudyDocumento80 páginasCase Studybravo deltafoxAinda não há avaliações
- IEC 60364-1 Electrical Installations in Buildings PDFDocumento80 páginasIEC 60364-1 Electrical Installations in Buildings PDFMarin PopescuAinda não há avaliações
- Quotation For Blue Star Printek From Boway2010 (1) .09.04Documento1 páginaQuotation For Blue Star Printek From Boway2010 (1) .09.04Arvin Kumar GargAinda não há avaliações
- The Miser'S T/R Loop Antenna: MiserlyDocumento3 páginasThe Miser'S T/R Loop Antenna: MiserlyTariq ZuhlufAinda não há avaliações
- Guidelines For Performance Task - LIVING MUSEUM PDFDocumento2 páginasGuidelines For Performance Task - LIVING MUSEUM PDFJoserie Barioga HernaneAinda não há avaliações
- ERP and SCM Systems Integration: The Case of A Valve Manufacturer in ChinaDocumento9 páginasERP and SCM Systems Integration: The Case of A Valve Manufacturer in ChinaiacikgozAinda não há avaliações
- W L 1176Documento1 páginaW L 1176shama093Ainda não há avaliações
- Sem 638 Manual de MantenimientoDocumento12 páginasSem 638 Manual de MantenimientoJhon Simanca100% (1)
- Iso 10211 Heat2 Heat3Documento16 páginasIso 10211 Heat2 Heat3nsk377416100% (1)
- Manas Lahon: Areas of Interests EducationDocumento2 páginasManas Lahon: Areas of Interests EducationmanaslahonAinda não há avaliações
- IET Membership Guidance NotesDocumento4 páginasIET Membership Guidance NotesKingsley InbasinghAinda não há avaliações
- Synopsis (Alumni Association)Documento17 páginasSynopsis (Alumni Association)vishygAinda não há avaliações
- DELTA - IA-HMI - Danfoss VLT 2800 - FC Protocol - CM - EN - 20111122Documento4 páginasDELTA - IA-HMI - Danfoss VLT 2800 - FC Protocol - CM - EN - 20111122Ronnie Ayala SandovalAinda não há avaliações
- A330 Tire Inspn PDFDocumento21 páginasA330 Tire Inspn PDFRithesh Ram NambiarAinda não há avaliações
- Synthesis and Characterization of Alumina Zirconia Composite Material Doped With SilicaDocumento7 páginasSynthesis and Characterization of Alumina Zirconia Composite Material Doped With SilicaAdvanced Research PublicationsAinda não há avaliações
- D 5720-95Documento9 páginasD 5720-95ipkm123Ainda não há avaliações
- Telenor Organization Structure and CultureDocumento29 páginasTelenor Organization Structure and CultureAli Farooqui85% (20)