Você também pode gostar
- Alexander (1990) Optimum Take-Off Techniques For High and Long JumpsDocumento9 páginasAlexander (1990) Optimum Take-Off Techniques For High and Long JumpsKaleena JohnstonAinda não há avaliações
- Coordinated muscle analysis during baseball hittingDocumento4 páginasCoordinated muscle analysis during baseball hittingAidanFarrellAinda não há avaliações
- Effects of Load Magnitude On Muscular Activity and Tissue Oxygenation During Repeated Elbow Flexions Until FailureDocumento10 páginasEffects of Load Magnitude On Muscular Activity and Tissue Oxygenation During Repeated Elbow Flexions Until FailuredanielAinda não há avaliações
- Tidow Long Jump ModelDocumento18 páginasTidow Long Jump ModelZachary LeeAinda não há avaliações
- BAREFOOT VS SHOD RUNNINGDocumento10 páginasBAREFOOT VS SHOD RUNNINGRenka BlodersAinda não há avaliações
- Division of Applied Sciences, Harvard Universily Cambridge, Massachusetts 02138 Receiwd 10 December 1979Documento20 páginasDivision of Applied Sciences, Harvard Universily Cambridge, Massachusetts 02138 Receiwd 10 December 1979NinaAinda não há avaliações
- Measurement of Contact Forces On A Kayak Ergometer With A Sliding Footrest 8211 Seat ComplexDocumento7 páginasMeasurement of Contact Forces On A Kayak Ergometer With A Sliding Footrest 8211 Seat ComplexZé BainasAinda não há avaliações
- A Simple Method For Measurement of Mechanical Power in JumpingDocumento10 páginasA Simple Method For Measurement of Mechanical Power in JumpingJ Roberto Meza OntiverosAinda não há avaliações
- SprintDocumento21 páginasSprintCorrado De SimoneAinda não há avaliações
- Mechanical Properties of Lumbar Spine Motion Segments Under Large LoadsDocumento6 páginasMechanical Properties of Lumbar Spine Motion Segments Under Large LoadsMike Vandumurugan100% (1)
- KEY WORDS: Winter Sport, Joint Loading, Inverse Dynamics: XXV ISBS Symposium 2007, Ouro Preto - Brazil 91Documento4 páginasKEY WORDS: Winter Sport, Joint Loading, Inverse Dynamics: XXV ISBS Symposium 2007, Ouro Preto - Brazil 91Tu SportAinda não há avaliações
- Bartonietz Rotational SP Technique Biomechanic Findings and Recommendations For TrainingDocumento16 páginasBartonietz Rotational SP Technique Biomechanic Findings and Recommendations For TrainingAldo GalvanAinda não há avaliações
- Biomechanics of The Snatch: Toward A Higher Training EfficiencyDocumento13 páginasBiomechanics of The Snatch: Toward A Higher Training Efficiencyamblus100% (7)
- Comparative Analysis of Lunge Techniques: Forward, Reverse, Walking LungeDocumento4 páginasComparative Analysis of Lunge Techniques: Forward, Reverse, Walking LungeWaldir Martins NetoAinda não há avaliações
- Bartonietz Training of Technique and Specific Power in Throwing Events PDFDocumento9 páginasBartonietz Training of Technique and Specific Power in Throwing Events PDFZachary LeeAinda não há avaliações
- Optimum Take-Off Techniques and Muscle Design For Long Jump: A. Seyfarth, R. Blickhan J. L. Van LeeuwenDocumento10 páginasOptimum Take-Off Techniques and Muscle Design For Long Jump: A. Seyfarth, R. Blickhan J. L. Van Leeuwenjp siaAinda não há avaliações
- 1991 Control Aspects of Active Above-Knee Prosthesis Popovic1991Documento17 páginas1991 Control Aspects of Active Above-Knee Prosthesis Popovic1991Dawit AssfawAinda não há avaliações
- Mati Pääsuke Põlveliigese BiomehaanikaDocumento244 páginasMati Pääsuke Põlveliigese BiomehaanikathedefectedgeneAinda não há avaliações
- Rotational Motion LabDocumento8 páginasRotational Motion LabjehrAinda não há avaliações
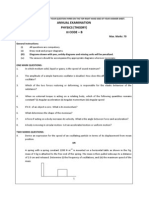
- Annual Examination Physics (Theory) Code - B: Time: 3 Hours Max. Marks: 70Documento4 páginasAnnual Examination Physics (Theory) Code - B: Time: 3 Hours Max. Marks: 70Sumathi SrinivasAinda não há avaliações
- LabDocumento14 páginasLabJeff KwhAinda não há avaliações
- BME 102 HW 6 SolutionsDocumento14 páginasBME 102 HW 6 SolutionsAlexAinda não há avaliações
- Cavagna On Energy Exchanges in Walking and RunningDocumento15 páginasCavagna On Energy Exchanges in Walking and RunningLaboratory in the WildAinda não há avaliações
- A Kinematic Analysis of The Jerk Technique in OlympicDocumento4 páginasA Kinematic Analysis of The Jerk Technique in OlympicAlex PollardAinda não há avaliações
- 1996 - Biomechanics of The Snatch Towards Higher Training EfficiencyDocumento13 páginas1996 - Biomechanics of The Snatch Towards Higher Training EfficiencyDonato FormicolaAinda não há avaliações
- 02 Unit II Vibration Nomograph Vibration Control 04 02 2017 Student and TeachersDocumento14 páginas02 Unit II Vibration Nomograph Vibration Control 04 02 2017 Student and TeachersKanishk Mehta100% (1)
- Ground Reaction Forces in Amputee Long JumpingDocumento4 páginasGround Reaction Forces in Amputee Long JumpingsashiAinda não há avaliações
- Kinetics of SprintingDocumento12 páginasKinetics of SprintingJuani CantellanosAinda não há avaliações
- Review of The Biomechanical Function of The Elbow Joint During Tennis StrokesDocumento11 páginasReview of The Biomechanical Function of The Elbow Joint During Tennis StrokesAdrian GonzalesAinda não há avaliações
- ChartogneEnglishPaper PDFDocumento3 páginasChartogneEnglishPaper PDFJony AlexanderAinda não há avaliações
- Tom Tellez Sprinting-A Biomechanical ApproachDocumento8 páginasTom Tellez Sprinting-A Biomechanical Approachn_dhaenen100% (1)
- ChartogneEnglishPaper PDFDocumento3 páginasChartogneEnglishPaper PDFJony AlexanderAinda não há avaliações
- The Role of Cocontraction in The Impairment of Movement Accuracy With FatigueDocumento6 páginasThe Role of Cocontraction in The Impairment of Movement Accuracy With FatiguemacAinda não há avaliações
- Hipstres 7Documento14 páginasHipstres 7Chethan K NarayanAinda não há avaliações
- Determining Strike and Dip From Geologic Maps (Revisited)Documento23 páginasDetermining Strike and Dip From Geologic Maps (Revisited)www_waadgeoAinda não há avaliações
- Biomechanics of Karate TechniquesDocumento5 páginasBiomechanics of Karate TechniquesCojocaru MariusAinda não há avaliações
- Handheld Seismometer: (L. Braile, November, 2000)Documento17 páginasHandheld Seismometer: (L. Braile, November, 2000)SteveAbonyiAinda não há avaliações
- J2013 - La Torre Et Al., 2013 ISCSBDocumento2 páginasJ2013 - La Torre Et Al., 2013 ISCSBDebora CantergiAinda não há avaliações
- Shoulder Muscle Forces and Tendon Excursions During Glenohumeral Abduction in The Scapular Plane - McMahon Et Al. 1995Documento10 páginasShoulder Muscle Forces and Tendon Excursions During Glenohumeral Abduction in The Scapular Plane - McMahon Et Al. 1995Frangolho JoãoAinda não há avaliações
- Chapter 2 - Oscillation - WavesDocumento4 páginasChapter 2 - Oscillation - Waveshoangkhanhvn8Ainda não há avaliações
- Determine Natural Frequency of Spring-Dashpot SystemDocumento21 páginasDetermine Natural Frequency of Spring-Dashpot SystemneenoonaaAinda não há avaliações
- Jagodin Bubka Above The Bar PDFDocumento4 páginasJagodin Bubka Above The Bar PDFGabriele GrassadoniaAinda não há avaliações
- Active Hip Orthosis For Assisting The Training ofDocumento13 páginasActive Hip Orthosis For Assisting The Training ofJawa AlhaffarAinda não há avaliações
- Tuesday, 18 July 2006 TUG2-2: 11:30 - 11:45: KEY WORDS: Athlete, Force, Jerk, Kinematics, StrengthDocumento4 páginasTuesday, 18 July 2006 TUG2-2: 11:30 - 11:45: KEY WORDS: Athlete, Force, Jerk, Kinematics, StrengthHams EletabAinda não há avaliações
- 1518-Article Text-2589-1-10-20080421Documento7 páginas1518-Article Text-2589-1-10-20080421Hitesh KishnaniAinda não há avaliações
- Vibration Measurement and Analysis of knee-Ankle-Foot Orthosis (KAFO)Documento32 páginasVibration Measurement and Analysis of knee-Ankle-Foot Orthosis (KAFO)marwan alobaidiAinda não há avaliações
- Air Track Collisions Lab Verifies Momentum ConservationDocumento8 páginasAir Track Collisions Lab Verifies Momentum ConservationShweta SridharAinda não há avaliações
- Frequency Effect On Selected Characteristics of The Elbow Joint Cyclic MovementsDocumento14 páginasFrequency Effect On Selected Characteristics of The Elbow Joint Cyclic MovementsCharles TrujilloAinda não há avaliações
- A Movement Criterion For RunningDocumento7 páginasA Movement Criterion For Runninghmalikn7581Ainda não há avaliações
- AssignmentDocumento9 páginasAssignmentAhmad KhanAinda não há avaliações
- Harmonic MotionDocumento23 páginasHarmonic MotionMaureen Galingan100% (1)
- Vibration of An Electric Bass GuitarDocumento46 páginasVibration of An Electric Bass GuitarVittorio PaganoAinda não há avaliações
- R (4.0 CM + (2.5 CM/S) I + (5.0 CM/S) T J: - (A) Find The Magnitude and Direction of The Dot's AverageDocumento4 páginasR (4.0 CM + (2.5 CM/S) I + (5.0 CM/S) T J: - (A) Find The Magnitude and Direction of The Dot's AverageOlojo Oluwasegun EmmanuelAinda não há avaliações
- Bosco Jump CalculationsDocumento7 páginasBosco Jump CalculationsRichard AndersonAinda não há avaliações
- General Physics Lab. Report1Documento10 páginasGeneral Physics Lab. Report1Ba LamAinda não há avaliações
- UG Projects 2014-15Documento2 páginasUG Projects 2014-15Narasimha ReddyAinda não há avaliações
- Question Bank Unit I Chapter 1: Fundamentals of Vibrations: Type ADocumento13 páginasQuestion Bank Unit I Chapter 1: Fundamentals of Vibrations: Type AKanhaiyaPrasadAinda não há avaliações
- The Knee Wear Prediction of UHMWPE Tibial Insert Using VIPRO PlatformDocumento10 páginasThe Knee Wear Prediction of UHMWPE Tibial Insert Using VIPRO PlatformMia AmaliaAinda não há avaliações
- Load-Displacement Properties of The Human Triceps Surae Aponeurosis and Tendon in Runners and Non-RunnersDocumento9 páginasLoad-Displacement Properties of The Human Triceps Surae Aponeurosis and Tendon in Runners and Non-RunnersbanditoszAinda não há avaliações
- The Painful Seven by Christian ThibaudeauDocumento10 páginasThe Painful Seven by Christian ThibaudeauZachary LeeAinda não há avaliações
- Hack Your Biological ClockDocumento6 páginasHack Your Biological ClockZachary LeeAinda não há avaliações
- Super Beast - Modern Methods of Strength Development (Thibaudeau)Documento21 páginasSuper Beast - Modern Methods of Strength Development (Thibaudeau)Zachary LeeAinda não há avaliações
- Hormone Therapy With A Strong LampDocumento3 páginasHormone Therapy With A Strong LampZachary LeeAinda não há avaliações
- OVT: Optimized Volume Training for Mass and StrengthDocumento6 páginasOVT: Optimized Volume Training for Mass and StrengthZachary Lee67% (3)
- Bulgarian Loading Secrets For Strength (Thibaudeau)Documento2 páginasBulgarian Loading Secrets For Strength (Thibaudeau)Zachary LeeAinda não há avaliações
- 16 Weeks To A New Deadlift PR (Andy Bolton & Elliot Newman)Documento6 páginas16 Weeks To A New Deadlift PR (Andy Bolton & Elliot Newman)Zachary LeeAinda não há avaliações
- Olympic Lifting CycleDocumento15 páginasOlympic Lifting CycleBrawny MikeAinda não há avaliações
- Bench Press Battlefield by Christian ThibaudeauDocumento15 páginasBench Press Battlefield by Christian ThibaudeauZachary Lee100% (2)
- Christian Thibaudeau - Shredded in 6 DaysDocumento11 páginasChristian Thibaudeau - Shredded in 6 DaysZachary LeeAinda não há avaliações
- Canadian Non-Linear Autoregulating Training (Thibaudeau)Documento8 páginasCanadian Non-Linear Autoregulating Training (Thibaudeau)Zachary Lee100% (1)
- Methods for Developing Leg Strength Through Squat VariationsDocumento3 páginasMethods for Developing Leg Strength Through Squat VariationsZachary LeeAinda não há avaliações
- Convergent Phase TrainingDocumento23 páginasConvergent Phase TrainingZachary Lee100% (1)
- Sucker Punch, Charles Staley (Nate Green) )Documento5 páginasSucker Punch, Charles Staley (Nate Green) )Zachary LeeAinda não há avaliações
- 7 Hard Truths About Lifting (Staley)Documento7 páginas7 Hard Truths About Lifting (Staley)Zachary Lee100% (1)
- Stack-10 Training (Staley)Documento4 páginasStack-10 Training (Staley)Zachary LeeAinda não há avaliações
- The Biological Significance of Cancer Mitochondria As A Cause of Cancer and The Inhibition of Glycolysis With Citrate As A Cancer TreatmentDocumento3 páginasThe Biological Significance of Cancer Mitochondria As A Cause of Cancer and The Inhibition of Glycolysis With Citrate As A Cancer TreatmentZachary LeeAinda não há avaliações
- Convergent Phase TrainingDocumento23 páginasConvergent Phase TrainingZachary Lee100% (1)
- International Food Science and Technology: Advances in Gluten-Free Bread TechnologyDocumento22 páginasInternational Food Science and Technology: Advances in Gluten-Free Bread TechnologyArea FiftyOneAinda não há avaliações
- Training Fundamentals 01-08-2000 by Charles StaleyDocumento8 páginasTraining Fundamentals 01-08-2000 by Charles StaleyZachary LeeAinda não há avaliações
- Success by Design, Optimizing Three Critical Components of TrainingDocumento6 páginasSuccess by Design, Optimizing Three Critical Components of TrainingZachary LeeAinda não há avaliações
- Selective Activation of The Infraspinatus During Various Shoulder External Rotation ExercisesDocumento4 páginasSelective Activation of The Infraspinatus During Various Shoulder External Rotation ExercisesZachary LeeAinda não há avaliações
- Vitamin E Tocopherols and Tocotrienols As Potential Radiation CountermeasuresDocumento16 páginasVitamin E Tocopherols and Tocotrienols As Potential Radiation CountermeasuresZachary LeeAinda não há avaliações
- The MOS 6567/6569 Video Controller (VIC-II)Documento52 páginasThe MOS 6567/6569 Video Controller (VIC-II)Zachary LeeAinda não há avaliações
- Avicenna's recommendations for treating liver and spleen illnessesDocumento16 páginasAvicenna's recommendations for treating liver and spleen illnessesZachary LeeAinda não há avaliações
- The Advanced Throwers Ten Exercise Program - PASSEDDocumento9 páginasThe Advanced Throwers Ten Exercise Program - PASSEDZachary LeeAinda não há avaliações
- Muscle Wasting and Sarcopenia in Heart Failure-The Current State of ScienceDocumento17 páginasMuscle Wasting and Sarcopenia in Heart Failure-The Current State of ScienceZachary LeeAinda não há avaliações
- Actions of Two Bi-Articular Muscles of The Lower Extremity.a ReviewDocumento6 páginasActions of Two Bi-Articular Muscles of The Lower Extremity.a ReviewZachary LeeAinda não há avaliações
- Specific Features of The Decathlon: by Y. Verhoshanski, A. Ushakov, O. HatshatryanDocumento5 páginasSpecific Features of The Decathlon: by Y. Verhoshanski, A. Ushakov, O. HatshatryanZachary Lee100% (1)
- A Comprehensive Approach To Non-Operative Rotator Cuff RehabilitationDocumento9 páginasA Comprehensive Approach To Non-Operative Rotator Cuff RehabilitationZachary LeeAinda não há avaliações
- Chapter 1 Taekwondo 2Documento7 páginasChapter 1 Taekwondo 2Cedric Vince BenigaAinda não há avaliações
- ADAP2-1 Monument of The AncientsDocumento17 páginasADAP2-1 Monument of The AncientsKen JacobsenAinda não há avaliações
- Cambridge English Young Learners' Picture BankDocumento47 páginasCambridge English Young Learners' Picture BankSara Hidalgo100% (1)
- ArnisDocumento21 páginasArnisNelmar John PeneraAinda não há avaliações
- M&E SPC 4 PS-RDocumento12 páginasM&E SPC 4 PS-Ramirul8686Ainda não há avaliações
- I Found A LoveDocumento3 páginasI Found A LovePerri PutraAinda não há avaliações
- FOOTBALL CLEAT TITLEDocumento5 páginasFOOTBALL CLEAT TITLEAxel GonzálezAinda não há avaliações
- 10 STR DEX CON INT WIS CHA: LevelDocumento4 páginas10 STR DEX CON INT WIS CHA: LevelFlumph TagarelaAinda não há avaliações
- 11 Lakh Classified DBDocumento246 páginas11 Lakh Classified DBasidique5_292665351Ainda não há avaliações
- Jason Behrendorff: Personal Information Full Name BornDocumento2 páginasJason Behrendorff: Personal Information Full Name BornRashid AnwerAinda não há avaliações
- Manual de Partes Dominar 400Documento82 páginasManual de Partes Dominar 400Cesar Yriarte CastilloAinda não há avaliações
- Engine and Gearbox Oil List From CINAAUTOPARTSDocumento7 páginasEngine and Gearbox Oil List From CINAAUTOPARTSCINA auto partsAinda não há avaliações
- 1 Manual Perforadore Spiradrill-LHD-SeriesDocumento12 páginas1 Manual Perforadore Spiradrill-LHD-SeriesRogelio VenturaAinda não há avaliações
- Bearings and Their LubricationDocumento5 páginasBearings and Their LubricationNuwan PeramunaAinda não há avaliações
- My Dream CSGO InventoryDocumento5 páginasMy Dream CSGO InventoryIshan KulkarniAinda não há avaliações
- Soneida Rodriguez ResumeDocumento1 páginaSoneida Rodriguez Resumeapi-280995362Ainda não há avaliações
- STADIUMSDocumento10 páginasSTADIUMSAyan BhattacharjeeAinda não há avaliações
- Online Review AnswersDocumento15 páginasOnline Review AnswersdebshistoryfairAinda não há avaliações
- St. Sava Soccer Flyer Page 2 5-16-14Documento2 páginasSt. Sava Soccer Flyer Page 2 5-16-14dorothyshopsAinda não há avaliações
- Conservation Unit Review 2021Documento7 páginasConservation Unit Review 2021oesmfpomsepofAinda não há avaliações
- PE NotesDocumento20 páginasPE NotesAlma C WalshAinda não há avaliações
- Hammer Chisel Max30 Hybrid Rev1Documento1 páginaHammer Chisel Max30 Hybrid Rev1albert johnAinda não há avaliações
- Ferdinand Free PatternDocumento17 páginasFerdinand Free PatternAswin Kumar Manoharan100% (1)
- The Sales of A TOTO Site Sports Betting SystemDocumento3 páginasThe Sales of A TOTO Site Sports Betting Systemleafmark5Ainda não há avaliações
- 7th Sea - Master IndexDocumento19 páginas7th Sea - Master IndexJean DupontAinda não há avaliações
- MUL BS Chemistry MorningDocumento33 páginasMUL BS Chemistry MorningMalik Azhar AbbasAinda não há avaliações
- Classic 350 Dual ChannelDocumento68 páginasClassic 350 Dual ChannelSunny SoniAinda não há avaliações
- Cricket Infrastructure BangladeshDocumento23 páginasCricket Infrastructure BangladeshShakil AlamAinda não há avaliações
- Cukurova - Backhoe Loader 883-885 (NEW)Documento2 páginasCukurova - Backhoe Loader 883-885 (NEW)JoseAinda não há avaliações
- 7 Ways To Counter The Traxler Mini Article PDFDocumento10 páginas7 Ways To Counter The Traxler Mini Article PDFSomeRandomGuyAinda não há avaliações