Você também pode gostar
- WV92Q248 01gb Instrument Air SystemDocumento8 páginasWV92Q248 01gb Instrument Air SystemwilsonAinda não há avaliações
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Technical Information Technical Information: InjectionDocumento4 páginasTechnical Information Technical Information: InjectionwilsonAinda não há avaliações
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5795)
- Control Air Upgrade Kit For Oil Mist Detector (OMD) : Service LetterDocumento21 páginasControl Air Upgrade Kit For Oil Mist Detector (OMD) : Service LetterwilsonAinda não há avaliações
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Man D 2866 E, D 2866 Te Exhaust-Gas Turbochargers 4Documento1 páginaMan D 2866 E, D 2866 Te Exhaust-Gas Turbochargers 4wilson0% (2)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
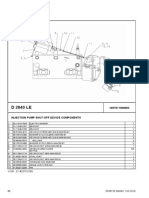
- Páginas de 416505415 Man 2840 Le Engine Spare Parts CatalogueDocumento1 páginaPáginas de 416505415 Man 2840 Le Engine Spare Parts CataloguewilsonAinda não há avaliações
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (345)
- L16/24 Engine Parts - Exchange Service: TurbochargerDocumento1 páginaL16/24 Engine Parts - Exchange Service: TurbochargerwilsonAinda não há avaliações
- C1. RTA48T Engine: Engine Selection and Project ManualDocumento12 páginasC1. RTA48T Engine: Engine Selection and Project Manualwilson100% (1)
- Plate 70613-40D Cleaning of Turbine SideDocumento1 páginaPlate 70613-40D Cleaning of Turbine SidewilsonAinda não há avaliações
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- Em Generator 6cta8.3 Parts Catalog 6CT Turbocharger 15 PDFDocumento15 páginasEm Generator 6cta8.3 Parts Catalog 6CT Turbocharger 15 PDFwilsonAinda não há avaliações
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- B&W Service Experience MC Engines Guiding Overhaul Intervals 1 PDFDocumento1 páginaB&W Service Experience MC Engines Guiding Overhaul Intervals 1 PDFwilsonAinda não há avaliações
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Engine Selection and Project Manual: C1. RTA48T EngineDocumento1 páginaEngine Selection and Project Manual: C1. RTA48T EnginewilsonAinda não há avaliações
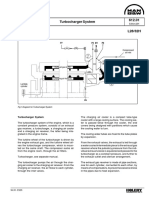
- Turbocharger System 612.01: Description Page 1 (2) Edition 22HDocumento7 páginasTurbocharger System 612.01: Description Page 1 (2) Edition 22HwilsonAinda não há avaliações
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- Project Guide L16/24: Exhaust Gas SystemDocumento15 páginasProject Guide L16/24: Exhaust Gas SystemwilsonAinda não há avaliações
- Operator'S Manual: 9 Liter (EMS 2) Volvo TAD734GEDocumento1 páginaOperator'S Manual: 9 Liter (EMS 2) Volvo TAD734GEwilsonAinda não há avaliações
- Turbocharger System 612.01: Description Page 1 (2) Edition 22HDocumento7 páginasTurbocharger System 612.01: Description Page 1 (2) Edition 22HwilsonAinda não há avaliações
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- Technical Specifications Sheet 1 - : 10 To 185 BHPDocumento1 páginaTechnical Specifications Sheet 1 - : 10 To 185 BHPwilsonAinda não há avaliações
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- Turbine Gas G.T.G. 1Documento17 páginasTurbine Gas G.T.G. 1wilsonAinda não há avaliações
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- N:/Turbine General Informetions .Nikolaos Kampitsis/Gas TurbineDocumento12 páginasN:/Turbine General Informetions .Nikolaos Kampitsis/Gas TurbinewilsonAinda não há avaliações
- B&W 6l16-24 Combustian Air System 15Documento15 páginasB&W 6l16-24 Combustian Air System 15wilson0% (1)
- Cleaning The Turbocharger in Operation: GeneralDocumento8 páginasCleaning The Turbocharger in Operation: GeneralwilsonAinda não há avaliações
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- Cordex 3.1kW: 24Vdc Modular Switched Mode RectifierDocumento2 páginasCordex 3.1kW: 24Vdc Modular Switched Mode RectifierwilsonAinda não há avaliações
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1091)
- Technical Specifications Sheet 3 - : 600 To 1300 BHPDocumento1 páginaTechnical Specifications Sheet 3 - : 600 To 1300 BHPwilsonAinda não há avaliações
- AP040008EN - SVX Trouble Shooting Guide - PBWDocumento14 páginasAP040008EN - SVX Trouble Shooting Guide - PBWwilsonAinda não há avaliações
- Technical Guide For Steel & Stainless Steel Turning - Seco Tools PDFDocumento20 páginasTechnical Guide For Steel & Stainless Steel Turning - Seco Tools PDFwilsonAinda não há avaliações
- d00tcj25 Quality of Fieldbus Signals Modbus GBDocumento4 páginasd00tcj25 Quality of Fieldbus Signals Modbus GBwilsonAinda não há avaliações
- Electrical and Starting System: 9X-8085 Control Gp-Engine ElectronicDocumento2 páginasElectrical and Starting System: 9X-8085 Control Gp-Engine ElectronicwilsonAinda não há avaliações
- Battery Charge Management: bq24160, bq24161, bq24162Documento1 páginaBattery Charge Management: bq24160, bq24161, bq24162wilsonAinda não há avaliações
- Weidmüller - Crimping Tool CTI - Technical DataDocumento3 páginasWeidmüller - Crimping Tool CTI - Technical DatawilsonAinda não há avaliações
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- TrommelDocumento2 páginasTrommelÁlvaro BarbosaAinda não há avaliações
- PCC1301 Modbus Register Map - Cph031105Documento8 páginasPCC1301 Modbus Register Map - Cph031105Gabriel CarvalhoAinda não há avaliações
- VW (Cod Eroare Diagnostic) - 982691461210 - 20220923143809Documento2 páginasVW (Cod Eroare Diagnostic) - 982691461210 - 20220923143809Marius ButaciuAinda não há avaliações
- DBP 12A Manual PDFDocumento12 páginasDBP 12A Manual PDFPandu S Adrianto100% (1)
- CLG835 Deutz EngineDocumento72 páginasCLG835 Deutz EngineLinio Calixto De JesusAinda não há avaliações
- 12 Volt 30 Amp PSUDocumento4 páginas12 Volt 30 Amp PSUJefri ErlanggaAinda não há avaliações
- FLSmidth Vecor HoistsDocumento6 páginasFLSmidth Vecor HoistsAnonymous ntE0hG2TPAinda não há avaliações
- Pachino 200 Ownes ManualDocumento18 páginasPachino 200 Ownes ManualrforsAinda não há avaliações
- Manual Karcher Lavadoras de Alta Pressao K1 302Documento24 páginasManual Karcher Lavadoras de Alta Pressao K1 302Marcos NunesAinda não há avaliações
- 2500 Series Data SheetDocumento3 páginas2500 Series Data SheetAndika PratamaAinda não há avaliações
- Babycook Express Instruction ManualDocumento22 páginasBabycook Express Instruction ManualGaleria Turismului MontanAinda não há avaliações
- Electic VehicleDocumento16 páginasElectic VehicleNishant ThapliyalAinda não há avaliações
- Hanbook EmbracoDocumento98 páginasHanbook EmbracoZETAQ2010Ainda não há avaliações
- Attach # 2. Routine Test Reports (Internal) - ReviewedDocumento3 páginasAttach # 2. Routine Test Reports (Internal) - ReviewedAvinash PatilAinda não há avaliações
- Smart Lamp ReportDocumento24 páginasSmart Lamp ReportImanFarhanAinda não há avaliações
- TOBPC72060001Documento73 páginasTOBPC72060001SawonAinda não há avaliações
- 3M Matic Case Sealer System 200aDocumento62 páginas3M Matic Case Sealer System 200aRaúl FloresAinda não há avaliações
- Four Wheel Steering SystemDocumento14 páginasFour Wheel Steering SystemChakri KankipatiAinda não há avaliações
- Acer Aspire V5-531-V5-571-V5-431Husk - Petra - UMA - None - Touch - CSDDocumento103 páginasAcer Aspire V5-531-V5-571-V5-431Husk - Petra - UMA - None - Touch - CSDImam WahyuAinda não há avaliações
- LM392Documento6 páginasLM392Brzata PticaAinda não há avaliações
- B452 Service Manual 04 - B450 - MMDocumento124 páginasB452 Service Manual 04 - B450 - MMgenmassaAinda não há avaliações
- Project: Layyah Combined Cycle Power Plant: Sub Station: Equipment: Panel Type BAY Ref: DateDocumento3 páginasProject: Layyah Combined Cycle Power Plant: Sub Station: Equipment: Panel Type BAY Ref: DatesamlashAinda não há avaliações
- Sandvik RD414 Training Material 2015Documento19 páginasSandvik RD414 Training Material 2015rolandAinda não há avaliações
- Internship Report: Mechathon Engg. Pvt. LTDDocumento5 páginasInternship Report: Mechathon Engg. Pvt. LTDPrasad AdigaAinda não há avaliações
- DST2600 Is A Compact and Rugged Automatic Gen-Set Control Panel For Engines With Power Up To 40kVA MaxDocumento4 páginasDST2600 Is A Compact and Rugged Automatic Gen-Set Control Panel For Engines With Power Up To 40kVA Maxmuhammad arifAinda não há avaliações
- Catalogue Welding Accessories PPE PDFDocumento107 páginasCatalogue Welding Accessories PPE PDFkhairy2013Ainda não há avaliações
- Tier 4 Final Engine: Motor GraderDocumento16 páginasTier 4 Final Engine: Motor Gradergoonzaalo_22Ainda não há avaliações
- Gek 113386BDocumento656 páginasGek 113386Bmohammed aliAinda não há avaliações
- Schneider Electric Xantrex XW Inverter/ChargerDocumento2 páginasSchneider Electric Xantrex XW Inverter/ChargerrameerdasAinda não há avaliações
- AUMA, Assembly InstructionsDocumento2 páginasAUMA, Assembly InstructionsGordinhorsAinda não há avaliações
- The ISO 45001:2018 Implementation Handbook: Guidance on Building an Occupational Health and Safety Management SystemNo EverandThe ISO 45001:2018 Implementation Handbook: Guidance on Building an Occupational Health and Safety Management SystemAinda não há avaliações
- Practical Industrial Safety, Risk Assessment and Shutdown SystemsNo EverandPractical Industrial Safety, Risk Assessment and Shutdown SystemsNota: 4 de 5 estrelas4/5 (11)
- Electrical Safety Code Manual: A Plain Language Guide to National Electrical Code, OSHA and NFPA 70ENo EverandElectrical Safety Code Manual: A Plain Language Guide to National Electrical Code, OSHA and NFPA 70ENota: 3 de 5 estrelas3/5 (6)
- Fire Protection Engineering in Building DesignNo EverandFire Protection Engineering in Building DesignNota: 4.5 de 5 estrelas4.5/5 (5)
- Guidelines for Initiating Events and Independent Protection Layers in Layer of Protection AnalysisNo EverandGuidelines for Initiating Events and Independent Protection Layers in Layer of Protection AnalysisNota: 5 de 5 estrelas5/5 (1)