Escolar Documentos
Profissional Documentos
Cultura Documentos
R-DC-91 Plantilla Propuestas de Grado
Enviado por
carlos eduardo quijanoTítulo original
Direitos autorais
Formatos disponíveis
Compartilhar este documento
Compartilhar ou incorporar documento
Você considera este documento útil?
Este conteúdo é inapropriado?
Denunciar este documentoDireitos autorais:
Formatos disponíveis
R-DC-91 Plantilla Propuestas de Grado
Enviado por
carlos eduardo quijanoDireitos autorais:
Formatos disponíveis
PÁGINA 1
DOCENCIA DE 22
R-DC-91 PROPUESTA DE TRABAJO DE GRADO VERSIÓN: 01
FACULTAD DE CIENCIAS NATURALES E INGENIERÍAS.
Ingeniería Electromecánica.
Propuesta de Trabajo de Grado
TÍTULO DE LA PROPUESTA
Diseño y elaboración de un robot minisumo para competencias.
PROPONENTES
Carlos Eduardo Quijano Rodriguez : 1098764178
DIRECTOR
Msc. Camilo Sandoval
Adscrito a
GICAV
Bucaramanga.
Fecha de Presentación: (30-05-19)
ELABORADO POR: REVISADO POR: APROBADO POR: Asesor de Planeación
Oficina de Investigaciones Soporte al Sistema Integrado de Gestión FECHA DE APROBACIÓN:
PÁGINA 2
DOCENCIA DE 22
R-DC-91 PROPUESTA DE TRABAJO DE GRADO VERSIÓN: 01
TABLA DE CONTENIDO
1. FICHA TÉCNICA DE LA PROPUESTA 3
2. RESUMEN EJECUTIVO 4
3. DESCRIPCIÓN DE LA PROPUESTA DE TRABAJO DE GRADO 5
3.1. PLANTEAMIENTO DE LA PROBLEMÁTICA 5
3.2. JUSTIFICACIÓN 5
3.3. OBJETIVOS 5
3.3.1. OBJETIVO GENERAL 6
3.3.2. OBJETIVOS ESPECÍFICOS 6
3.4. ESTADO DEL ARTE / ANTECEDENTES 6
3.5. MARCO REFERENCIAL 6
3.6. ALTERNATIVA DE SOLUCIÓN 7
3.7. METODOLOGÍA PROPUESTA 7
3.8. RESULTADOS ESPERADOS 7
3.9. ESTRATEGIA DE DIVULGACIÓN 8
3.10. CRONOGRAMA DE ACTIVIDADES 8
4. PRESUPUESTO 9
5. REFERENCIAS BIBLIOGRÁFICAS 11
ELABORADO POR: REVISADO POR: APROBADO POR: Asesor de Planeación
Oficina de Investigaciones Soporte al Sistema Integrado de Gestión FECHA DE APROBACIÓN:
PÁGINA 3
DOCENCIA DE 22
R-DC-91 PROPUESTA DE TRABAJO DE GRADO VERSIÓN: 01
1. FICHA TÉCNICA DE LA PROPUESTA
Título Diseño y elaboración de un robot minisumo para competencias.
Carlos Eduardo Quijano carloseduardoquijanon
1098764178 3166162183
Rodriguez r@gmail.com
Nombre del grupo de
GICAV
investigación
Línea de Investigación Electronica
Director Msc. Camilo Sandoval
Lugar de ejecución Bucaramanga, Santander.
Duración 4 meses
Modalidad Proyecto de investigación.
Costo Trescientos sesenta y seis mil cien pesos (366.100)
Palabras claves Minisumo, Doyho, Algoritmo, Microcontrolador, Micromotor.
Observaciones generales: Comentarios adicionales relevantes. Si no los hay se deja en blanco. Estas observaciones
deben ser concertadas con el Director.
Diligencie la siguiente información si corresponde a un trabajo de grado a desarrollar con una empresa, centro empresarial,
gremio de producción u otra universidad. Se debe entregar carta de compromisos por parte de la empresa en dónde se
especifique los requerimientos o actividades a desarrollar por el estudiante y nombre del responsable en la empresa de
supervisar y asesorar al practicante.
Nombre de la Empresa
Representante Legal.
Cédula de ciudadanía o NIT
Dirección completa
Ciudad / Departamento
Teléfonos / Fax / Celular
Correo electrónico
Tipo de entidad Pública o privada
Código del Convenio especial de colaboración
Los abajo firmantes confirman que todos los datos incluidos en la presente propuesta son correctos y verídicos, que no
incumplen ninguna ley ni norma vigente. Declaran que corresponde a las Unidades Tecnológicas de Santander la titularidad de
los derechos patrimoniales sobre los productos intelectuales y creaciones obtenidas como resultado del presente trabajo de
grado, teniendo en cuenta que este trabajo de grado es considerado una obra por encargo. El estudiante ostenta los derechos
morales como autor y tendrá el respectivo reconocimiento académico.
______________________
CARLOS EDUARDO QUIJANO RODRIGUEZ
_______________________
ELABORADO POR: REVISADO POR: APROBADO POR: Asesor de Planeación
Oficina de Investigaciones Soporte al Sistema Integrado de Gestión FECHA DE APROBACIÓN:
PÁGINA 4
DOCENCIA DE 22
R-DC-91 PROPUESTA DE TRABAJO DE GRADO VERSIÓN: 01
Msc. Camilo Sandoval
ELABORADO POR: REVISADO POR: APROBADO POR: Asesor de Planeación
Oficina de Investigaciones Soporte al Sistema Integrado de Gestión FECHA DE APROBACIÓN:
PÁGINA 5
DOCENCIA DE 22
R-DC-91 PROPUESTA DE TRABAJO DE GRADO VERSIÓN: 01
2. RESUMEN EJECUTIVO
Diseñar un minisumo de acuerdo a las reglas dadas por las competencias nacionales que sirva
como modelo para que los estudiantes de tecnología en electrónica industrial creen sus propios
diseños.
Con la elaboración de este proyecto, se pretende dejar en el semillero ROBUTS, un robot
minisumo y una guía para su diseño, elaboración y programación, con el fin de que los
estudiantes del programa Ing. electromecanica industrial con base en este modelo desarrollen
sus propios prototipos, y así incentivar en ellos la participación en el ámbito de la robótica
aplicada, poniendo de esta manera en práctica los temas vistos en el aula de clase.
Con el desarrollo de este proyecto, se pretende poner en práctica todos los conocimientos
adquiridos en el aula de clase, para implementar un diseño funcional de un robot móvil
(minisumo), y con esta experiencia adquirida al momento de ejecutar el proyecto, realizar un
manual donde quede plasmado el paso a paso para la realización de un robot.
Se espera que, al cumplirse el tiempo de realización del proyecto, se entregue un robot móvil
que permita el desarrollo de otros minisumos y que estos cumplan con la reglamentación
necesaria para participar en batallas nacionales e internacionales.
ELABORADO POR: REVISADO POR: APROBADO POR: Asesor de Planeación
Oficina de Investigaciones Soporte al Sistema Integrado de Gestión FECHA DE APROBACIÓN:
PÁGINA 6
DOCENCIA DE 22
R-DC-91 PROPUESTA DE TRABAJO DE GRADO VERSIÓN: 01
3. DESCRIPCIÓN DE LA PROPUESTA DE TRABAJO DE GRADO
3.1. PLANTEAMIENTO DE LA PROBLEMÁTICA
En la actualidad la robótica educativa se ha incorporado en las instituciones, con el fin de
mejorar habilidades y competencias de los estudiantes. Es por eso que los colegios lo están
incorporando desde los grados inferiores hasta los superiores; trabajando en programas con
módulos de robótica, incluso algunos cuentan con kits de LEGO para principiantes.
En Bucaramanga, por ejemplo, tenemos dos colegios, San Pedro Claver y el Instituto
Tecnológico Salesiano, que han participado incluso en eventos internacionales, destacando por
sus buenos resultados (KILÔ ARDILA, 2018).
Con los grandes logros que ha llevado las competencias a nivel nacional e internacional,
muchas instituciones han empezado a realizar sus propias competencias en diferentes
modalidades, siendo el robot minisumo una de las categorías con más asistentes y más
variedad en diseños e innovación en cuanto a estrategias de combate y elementos utilizados.
Participar en estas competencias les otorga a las instituciones un reconocimiento en robótica,
un área que al estar en auge atrae mucha población joven, con ganas de aprender e incursionar
en el tema. Aunque en las Unidades Tecnológicas de Santander se han desarrollado algunas
competencias, no se ve reflejada la competición de los estudiantes para concursos fuera de la
institución. Este limitante se da a veces por la falta de conocimiento en el desarrollo de los
mismos. O por una falta de guía al momento de desarrollar su propio minisumo de competencia.
Por esta razón los estudiantes de electrónica en las competencias no participan en las
competencias de ámbito regional y mucho menos nacional. Por esta razón la pregunta a este
proyecto sería: ¿Con el desarrollo de un manual de diseño y un prototipo de un minisumo, se
podría incentivar a los estudiantes del programa de electrónica a desarrollar sus propios robot
móviles con el fin de participar en competencias, regionales y nacionales?
ELABORADO POR: REVISADO POR: APROBADO POR: Asesor de Planeación
Oficina de Investigaciones Soporte al Sistema Integrado de Gestión FECHA DE APROBACIÓN:
PÁGINA 7
DOCENCIA DE 22
R-DC-91 PROPUESTA DE TRABAJO DE GRADO VERSIÓN: 01
3.2. JUSTIFICACIÓN
Hoy en día los jóvenes, desde muy temprana edad se interesan en la Electrónica , pero muchas
veces, por falta de un instructivo no pueden materializar su idea, o llegan a un punto en donde
no pueden avanzar más, ya que no saben cómo aplicar el conocimiento que poseen.
Al contar con una guía de diseño, ensamble, programación y posibles adaptaciones de un robot,
asequible a todos los estudiantes, se podría ver más participación por parte de los estudiantes
del semillero, en actividades de robótica, y fortalecer así las experiencias prácticas en la
carrera.
3.3. OBJETIVOS
3.3.1. OBJETIVO GENERAL
Diseñar un minisumo de acuerdo a las reglas dadas por las competencias nacionales que sirva
como modelo para que los estudiantes de Ing. electromecánica creen sus propios diseños.
3.3.2. OBJETIVOS ESPECÍFICOS
Diseñar el chasis del robot, cumpliendo con las normas y características que debe tener el
robot, para que sea un robot móvil de competencia.
Evaluar el tipo de sensores, motores e implementos electrónicos a utilizar en el robot aplicando
los conocimientos adquiridos en las horas teóricas, para hacerlo eficiente al momento de una
competencia.
Desarrollar el algoritmo que cumpla con las reglas de competencia en el ámbito nacional con
funciones de defensa y ataque de forma autónoma.
Crear un manual de partes, programación, funcionamiento y posibles mejoras o adaptaciones,
basándose en modelos desarrollados para competencias de ámbito nacional.
3.4. ESTADO DEL ARTE / ANTECEDENTES
En los últimos años, la robótica como disciplina educativa y recreativa ha tenido una gran
acogida en países latinos, por este motivo los colegios y universidades buscan que sus
estudiantes emprendan en este campo.
Gracias a esto, anteriormente se han publicado artículos y guías sobre la elaboración de este
tipo de robots con diferentes plataformas de programación, como es el caso de Mont (2017),
ELABORADO POR: REVISADO POR: APROBADO POR: Asesor de Planeación
Oficina de Investigaciones Soporte al Sistema Integrado de Gestión FECHA DE APROBACIÓN:
PÁGINA 8
DOCENCIA DE 22
R-DC-91 PROPUESTA DE TRABAJO DE GRADO VERSIÓN: 01
quien en su artículo, "Diseño y programación de un robot minisumo con Arduino" usó un
Arduino nano, para controlar su robot, aunque la plataforma de programación a utilizar es
diferente a la planteada por este proyecto, se relaciona con la investigación, el instructivo paso
a paso que plantea Mont (2017) para el ensamble del chasis del minisumo.
En otro caso, Barbadillo (2012) en su tesis de grado “Proyecto Arduino: Sumo robótico.”,
plantea los parámetros importantes a la hora de elegir un motor, los aspectos clave a tener en
cuenta para el diseño del chasís, elección de ruedas y sensores. Además de los aspectos
mencionados anteriormente, Barbadillo (2012), realiza también un análisis de las debilidades y
fortalezas de los posibles diseños de robot.
3.5. MARCO REFERENCIAL
3.5.1. Marco teórico
3.5.1.1. Historia de la robótica.
Desde sus inicios, la humanidad ha buscado emplear herramientas que faciliten su
trabajo, gracias a este afán de desarrollo, empezaron a crearse los primeros sistemas
automatizados, que eran configurables por medio de levas, fuimos avanzando, hasta llegar a los
inicios de la computación, de ahí, se nos abre un camino de infinitas posibilidades en cuanto a
automatizar los sistemas, en la década de los 60, se acuña el término robot industrial, siendo
los Estados Unidos de América, el país que mayormente adoptó este tipo de tecnología en su
manufactura.
Con el paso del tiempo, se empezaron a crear robots que imitan el movimiento de algunas
extremidades humanas, esto no solo con fines industriales, sino también educativos y
recreativos.
3.5.1.2. Historia del sumo.
A finales de los años 80, Hiroshi Nozawa, presidente de Fuji software en Japón, con el fin de
que los más jóvenes se empezaran a interesar en robótica, creó un torneo de exhibición de una
modalidad de robot denominada Sumo, para 1990, año en el que se realiza el primer torneo
oficial, habría una participación de 147 robots, dando así inicio a una nueva disciplina en la
robótica.
Esta categoría es una lucha entre dos robots autónomos que se realiza sobre un área de
combate denominada Dhoyo y consiste en lograr sacar de esta área al robot oponente.
ELABORADO POR: REVISADO POR: APROBADO POR: Asesor de Planeación
Oficina de Investigaciones Soporte al Sistema Integrado de Gestión FECHA DE APROBACIÓN:
PÁGINA 9
DOCENCIA DE 22
R-DC-91 PROPUESTA DE TRABAJO DE GRADO VERSIÓN: 01
Uno de los torneos más importantes de esta modalidad en Colombia, es Runibot, una
competencia multidisciplinaria organizada por la asociación red universitaria, en esta
competencia participan estudiantes de centros de educación superior de todo el país,
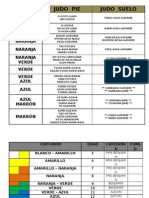
3.5.1.3. Reglamento.
El reglamento para la modalidad minisumo es el siguiente:
En cuanto al robot, sus medidas deben ser de 10 cms de ancho por 10 cms de largo, sin
un límite de medidas en su altura y un peso máximo de 500 gramos, debe ser totalmente
autónomo y contar con un módulo de arranque que suministra la competencia. El robot no
puede causar daño ocasional al oponente o a la pista, en caso de hacerlo, será descalificado.
Si hablamos del doyho, será una superficie de madera con forma circular y un diámetro
de 77 centímetros, distribuidos entre un círculo interno color negro con un diámetro de 72 cms y
un círculo en el borde, color blanco de 5 cms.
3.5.1.4. Diseño del chasís.
Para el diseño del chasis se tendrán en cuenta conceptos de física como centros de
masa, inercia, impactos, lo anterior en busca de hacer el robot móvil, más estable al momento
de enfrentarse al contrincante, lo ideal es que su centro de masa se encuentre cerca al piso,
para que las fuerzas producidas al momento del impacto, no ocasionen que el minisumo se
voltee.
3.5.1.5. Selección de motores.
Antes de empezar a seleccionar el motor ideal, debemos dotarnos de las alternativas
comerciales que encontramos, al día de hoy, el mercado nos ofrece gran variedad en motores
que funcionan con corriente directa (característica principal a tener en cuenta para la selección),
entre estos motores encontramos: Motores paso a paso, micromotores, motorreductores, y
servomotores. A continuación hablaremos un poco de cada uno de estos y las ventajas de
usarlos en nuestro diseño
3.5.1.5.1. Motores paso a paso.
Este tipo de motores cuentan con una precisión sorprendente, cosa que para efectos del
minisumo es una ventaja a destacar, pero no cuentan con la velocidad necesaria para
sorprender al robot contrincante en un ataque frontal.
ELABORADO POR: REVISADO POR: APROBADO POR: Asesor de Planeación
Oficina de Investigaciones Soporte al Sistema Integrado de Gestión FECHA DE APROBACIÓN:
PÁGINA 10
DOCENCIA DE 22
R-DC-91 PROPUESTA DE TRABAJO DE GRADO VERSIÓN: 01
Estos motores se controlan de acuerdo a sus entradas digitales, y varían sus grados de
movimiento por medio de impulsos eléctricos, funcionan desde 5 a 12 voltios en corriente
directa, dependiendo a su fabricante, existen dos tipos de motores paso a paso, los unipolares y
los bipolares.
3.5.1.5.2. Motores paso a paso bipolares.
Cuentan con dos cables por cada una de sus bobinas, los más comunes cuentan con
dos bobinas en su interior, para controlar cada una de ellas se necesita emplear un Puente H
además del controlador anteriormente mencionado, este detalle los hace más difíciles y
costosos de controlar.
Imagen 1. Conexión de un Puente H a una de las bobinas del motor
ELABORADO POR: REVISADO POR: APROBADO POR: Asesor de Planeación
Oficina de Investigaciones Soporte al Sistema Integrado de Gestión FECHA DE APROBACIÓN:
PÁGINA 11
DOCENCIA DE 22
R-DC-91 PROPUESTA DE TRABAJO DE GRADO VERSIÓN: 01
Imagen 2. Conexión de un motor bipolar, de dos bobinas.
3.5.1.5.3. Motores paso a paso unipolares.
Son más sencillos de controlar que los anteriores, se pueden manipular sin el
controlador y esto hace que sean más económicos a la hora de montaje.
Cuentan con cuatro bobinas y generalmente cinco o seis cables según su conexión interna.
Imagen 3. Esquema de conexión de un motor de pasos unipolar.
ELABORADO POR: REVISADO POR: APROBADO POR: Asesor de Planeación
Oficina de Investigaciones Soporte al Sistema Integrado de Gestión FECHA DE APROBACIÓN:
PÁGINA 12
DOCENCIA DE 22
R-DC-91 PROPUESTA DE TRABAJO DE GRADO VERSIÓN: 01
3.5.1.5.4. Micromotores.
Son motores que funcionan a altas revoluciones, por tanto el torque que entregan no es
muy alto, cuentan con cajas reductoras incorporadas que bajan las revoluciones en el eje final
de salida, son una buena opción para un robot de este tipo, ya que la velocidad es la adecuada
para un ataque al oponente, sumado a que ocupan muy poco espacio para su montaje y
adaptación.
Para su conexión es necesario emplear un Puente H al momento de hacer la inversión de giro,
Funcionan con un rango de voltaje que va desde 3,3 hasta 6 voltios de corriente directa y la
corriente de consumo al momento del arranque no supera los 2 Amperios.
3.5.1.5.5. Motorreductores.
Contrario a los micromotores, estos motores entregan bajas revoluciones, pero un torque
muy alto, una ventaja de usar este tipo de motor, es la fuerza que se puede ejercer en un
choque con el contrincante.
Son mucho más grandes y pesados que los micromotores, por esta razón, usarlos nos resta
espacio para el montaje electrónico y puede ocasionar que se incumpla el límite de peso
establecido por las competencias.
3.5.1.5.6. Servomotores.
Este tipo de motor nos permite controlar su ángulo de giro y la velocidad con la que lo
hace, entregan un gran torque en su eje de salida y la inercia que manejan es muy baja.
Para controlar estos motores se hace necesario modular el ancho de pulso de la señal de
entrada; Al igual que los motorreductores ocupan mucho más espacio al momento de su
montaje, aunque su peso es reducido debido al material del que está hecha su carcasa.
La corriente de consumo es muy reducida, lo que es una ventaja al momento de seleccionar las
baterías del robot móvil.
3.5.1.6. Selección del material de las ruedas.
Lo que se busca al momento de seleccionar el material para las ruedas del minisumo es
que este me brinde una adherencia al doyho, tal que al momento de un choque cuerpo a cuerpo
con el rival, pueda aprovechar al máximo el torque proporcionado por el motor. Los materiales
más usados para esta aplicación son:
- Neopreno.
- Silicona.
- Látex.
ELABORADO POR: REVISADO POR: APROBADO POR: Asesor de Planeación
Oficina de Investigaciones Soporte al Sistema Integrado de Gestión FECHA DE APROBACIÓN:
PÁGINA 13
DOCENCIA DE 22
R-DC-91 PROPUESTA DE TRABAJO DE GRADO VERSIÓN: 01
3.5.1.6.1. Neopreno.
Es un caucho sintético, básicamente es un polímero entre cloro y butadieno, fue desarrollado
inicialmente por la compañía DuPont, en EEUU, gracias a que cuenta con propiedades como
alta resistividad mecánica, es un componente muy utilizado en el área de la robótica,
principalmente en ruedas para robots móviles, tanto así que se consigue una gran variedad de
medidas desde externas, hasta en la conexión con el eje del motor.
3.5.1.6.2. Silicona.
Es un polímero que está constituido por una serie de átomos de silicio y oxígeno, es un
material muy resistente a temperaturas, cuenta con una Resistencia a la tracción de 70 kg/cm2
con una elongación promedio de 400%. Mantiene estos valores aun después de largas
exposiciones a temperaturas extremas; Las ruedas de este tipo no son muy comerciales, por
este motivo, para utilizar este material debemos fabricar previamente el molde con las medidas
deseadas, al igual que para el rin.
3.5.1.6.3. Látex.
Es un material orgánico que producen algunas plantas y hongos, es un material muy
elástico y bajo fricción, posee una considerable adherencia a superficies, no es muy común su
uso en la robótica, así que para usar este material en las ruedas del minisumo, es necesario
forrar unas ruedas ya existentes con este material, la desventaja de este sistema, es que, al
momento de aplicar el pegamento al látex, este puede perder sus características.
3.5.2. Marco referencial.
La competencia de minisumo, es un certamen en donde dos robots a la vez, se miden
en sus rutinas de defensa y ataque, en el resultado también influye, el tipo de motor, el tipo de
llantas, que deben ejercer la fuerza suficiente para empujar al contrincante por fuera del área de
competencia, la velocidad igualmente juega un papel importante, ya que entre más rápido se
llegue al contrincante, menos tiempo tiene para reaccionar y defenderse.
El centro de masas, es el punto en donde se reflejan todas las fuerzas aplicadas a un
objeto en movimiento, la ubicación de este punto me ayudará a determinar la velocidad y
trayectoria que tomará el robot móvil cuando se le aplique una fuerza, por ejemplo, en un
choque contra el oponente.
ELABORADO POR: REVISADO POR: APROBADO POR: Asesor de Planeación
Oficina de Investigaciones Soporte al Sistema Integrado de Gestión FECHA DE APROBACIÓN:
PÁGINA 14
DOCENCIA DE 22
R-DC-91 PROPUESTA DE TRABAJO DE GRADO VERSIÓN: 01
La tracción en un vehículo, se trata de la fuerza que ejerce el motor, directamente a sus
ruedas, entre más ejes con fuerza motriz aplicada, más adherencia tendrá en robot al piso, y
será más difícil que una fuerza ajena a él, lo haga resbalar.
Un sensor ultrasónico, es un dispositivo conformado por dos componentes básicos:
emisor y receptor. El primero emite ondas de ultrasonido, las cuales rebotan con el objeto que
se encuentre en frente del campo de visión del sensor, y el receptor mide el tiempo que tardan
en retornar esas ondas enviadas por el mismo sensor, de acuerdo al tiempo, el equipo genera
un voltaje a la salida que va desde cero (0) a cinco (5) voltios, con una relación de cero (0) a
cuatro (4) metros respectivamente.
Los sensores infrarrojos, al igual que el anterior, poseen en su cuerpo un emisor y un
receptor, el principio de funcionamiento es el mismo, sólo que esta vez lo que se transmite
desde el emisor es un haz de luz infrarroja.
El microcontrolador PIC18F2550, es un dispositivo lógico programable, que cuenta con
28 pines de interfaz, entre los cuales se manejan, 6 puertos análogos para el manejo de
sensores, y 18 puertos de entradas y salidas digitales, es un dispositivo que en su encapsulado
tipo superficial, ocupa muy poco espacio, ventaja para nuestro diseño.
3.5.3. Marco legal.
Desde que el ser humano descubrió que podía inventar máquinas que pudieran hacer su
trabajo más fácil, se ha vuelto una necesidad automatizar la mayoría de procesos productivos
para hacerlos más eficientes, pero la robótica no sólo se quedó en lo industrial, actualmente
existen robots que realizan quehaceres, ayudan a personas discapacitadas, divierten a la gente,
e incluso participan activamente en escenarios de guerra. Debido a este auge mundial, en 1942
(Asimov, I.) publica el libro “círculo vicioso”, en donde incluye tres leyes fundamentales para la
robótica, las cuales son:
- Un robot no hará daño a un ser humano o, por inacción, permitirá que un ser humano
sufra daño. (Asimov, 1942)
- Un robot debe obedecer las órdenes dadas por los seres humanos excepto si estas
órdenes entrasen en conflicto con la 1ª ley. (Asimov, 1942)
- Un robot debe proteger su propia existencia en la medida en que esta protección no
entre en conflicto con la 1ª o la 2ª Ley. (Asimov, 1942)
Estas leyes surgen en pie de una sana convivencia con las máquinas, aunque una de
las más actuales problemáticas generadas por el uso de estas tecnologías no es el peligro que
supone convivir a diario con una máquina, hoy por hoy, los robots han suplido de una manera
ELABORADO POR: REVISADO POR: APROBADO POR: Asesor de Planeación
Oficina de Investigaciones Soporte al Sistema Integrado de Gestión FECHA DE APROBACIÓN:
PÁGINA 15
DOCENCIA DE 22
R-DC-91 PROPUESTA DE TRABAJO DE GRADO VERSIÓN: 01
más que eficiente la labor de un ser humano, lo que ha provocado que dejen de existir cargos
operativos en muchas empresas. (Foro económico mundial, 2018)
Según el informe, The Future of Work 2018 (Foro Económico Mundial), para el año
2025, en el mundo desaparecerán 75 millones de empleos a manos de la automatización de los
procesos y la robótica, para esto algunas empresas buscan reentrenar a los trabajadores que
ya poseen para que se adapten a los nuevos cargos que se crearán con la incursión de esta
nueva tecnología, mientras que un 84% no cuenta con un plan de contingencia para reponer los
cargos que eliminarán.
Al ver que la robótica está ocupando todas las áreas conocidas por los humanos, no sólo
la industrial, la Unión Europea ideó seis nuevas propuestas para mitigar el impacto que
generaría la implantación en masa de las nuevas tecnologías, estas propuesta son:
- Proteger a los seres humanos de los daños causados por robots.
- Respetar el rechazo de la atención por parte de un robot.
- Proteger la libertad humana frente a los robots.
- Proteger a la humanidad contra las violaciones de la privacidad cometidas por un robot.
- Gestión de datos personales procesados por robots.
- Proteger a la humanidad contra el riesgo de manipulación por robots.
- Evitar la disolución de los vínculos sociales.
- Igualdad de acceso al progreso en robótica.
- Restringir el acceso humano a las tecnologías de mejora.
Esta última, se propone con el fin de poner un límite al avance en la tecnología, no sería
conveniente para nuestra especie, crear una máquina que pueda reemplazarse, tomar
decisiones por su cuenta y darle total autonomía, esto podría llegar a ser catastrófico para la
humanidad.
Actualmente en Colombia, no existe una normatividad que regule el uso de robots como
dispositivos didácticos y de entretenimiento.
3.6. ALTERNATIVA DE SOLUCIÓN
Dar al estudiantado los medios para poder incursionar en la robótica: Se contará con
varias copias del manual de diseño, partes, programación y posibles adaptaciones del robot
móvil (minisumo) para que los estudiantes se guíen en este, para materializar sus ideas,
además, se dejará como muestra un robot terminado y funcional, para que ellos realicen sus
respectivas pruebas.
ELABORADO POR: REVISADO POR: APROBADO POR: Asesor de Planeación
Oficina de Investigaciones Soporte al Sistema Integrado de Gestión FECHA DE APROBACIÓN:
PÁGINA 16
DOCENCIA DE 22
R-DC-91 PROPUESTA DE TRABAJO DE GRADO VERSIÓN: 01
3.7. METODOLOGÍA PROPUESTA
El tipo de investigación que se emplea para realizar el proyecto, es la investigación aplicada,
que se basa en llevar a la práctica los fundamentos teóricos, con el fin de dar solución a una
problemática.
En este particular caso, se quiere poner en práctica todos los conocimientos adquiridos en el
aula de clase, para implementar un diseño funcional de un robot móvil (minisumo), y con esta
experiencia adquirida al momento de ejecutar el proyecto, realizar un manual donde quede
plasmado el paso a paso para la realización de un robot.
Buscar información sobre los reglamentos de las principales competencias, Investigando en la
página web de cada una de las competencias, y basando en estas el diseño y las estrategias
del robot móvil.
Seleccionar los sensores, motores y materiales ideales al momento de la construcción del robot,
teniendo en cuenta la aplicación y los trabajos a los que estarán sometidos, evitando subutilizar
los implementos mencionados anteriormente, para esto se aplicarán las bases teóricas
obtenidas en el aula de clase.
Desarrollar un algoritmo en el lenguaje de programación Visual Basic, utilizando el software de
licencia libre, Visual Code Studio, aprovechando al máximo las funciones del microcontrolador,
y sin sobrepasar su capacidad de memoria, se pretende hacer pruebas iniciales de autonomía
del robot, movilizándose sobre una pista improvisada, luego añadiendo obstáculos, hasta llegar
a enfrentarlo con un objeto en movimiento.
Para la realización del manual se pretende ir datando cada experiencia, cada situación y cada
dificultad presentada, desde el momento de la selección de componentes hasta el ensamble del
robot, para que al momento en que el estudiante que recurrió a esta guía, pase por una
situación similar, tenga con toda seguridad, un respaldo para tomar la mejor decisión según la
aplicación de su robot.
3.8. RESULTADOS ESPERADOS
Se espera que, al cumplirse el tiempo de realización del proyecto, se entregue el robot móvil,
con la reglamentación necesaria para participar en batallas nacionales e internacionales.
Al finalizar el proyecto, se entregará un manual de diseño, programación, funcionamiento y
posibles mejoras o adaptaciones del robot, para que mediante a través del semillero de
ELABORADO POR: REVISADO POR: APROBADO POR: Asesor de Planeación
Oficina de Investigaciones Soporte al Sistema Integrado de Gestión FECHA DE APROBACIÓN:
PÁGINA 17
DOCENCIA DE 22
R-DC-91 PROPUESTA DE TRABAJO DE GRADO VERSIÓN: 01
investigación ROBUTS, este sea asequible a los estudiantes de la ing. electromecánica y
puedan basar en este sus diseños y prototipos.
3.9. ESTRATEGIA DE DIVULGACIÓN
Al finalizar el proyecto, se solicitará a la coordinación de electromecánica que el manual de
diseño, partes, programación y posibles adaptaciones del robot móvil (minisumo), esté
disponible tanto en blog como en las redes sociales y carteleras del programa. También se
publicará un artículo en formato IEEE en la plataforma de Colciencias.
3.10. CRONOGRAMA DE ACTIVIDADES.
semana
Duración % Real (fuera del % Completado (fuera
resaltada 4 Inicio real
del plan Completado plan) del plan)
:
Semana
INICIO DURACIÓ INICI PORCENTAJE
DURACIÓ
ACTIVIDAD DEL N DEL O
N REAL
COMPLETAD
PLAN PLAN REAL O 1 2 3 4 5 6 7 8 9 1 1 1 1 14 1 1 1 1 1
0 1 2 3 5 6 7 8 9
Datarse sobre
reglamentos de
1 principales 1 2 1 2 100%
competencias.
Selección de
2 sensórica. 3 1 3 1 100%
Selección de 3 1 3 1
3 motores. 100%
Diseño de la 4 4 4 4
4 carcasa del robot. 100%
Realizar el 8 2 8 1
ensamble
5
mecánico.
50%
Diseñar el 10 4
7 programa 0%
Realizar el 14 2
montaje de parte
8 electrónica e 0%
instrumental.
ELABORADO POR: REVISADO POR: APROBADO POR: Asesor de Planeación
Oficina de Investigaciones Soporte al Sistema Integrado de Gestión FECHA DE APROBACIÓN:
PÁGINA 18
DOCENCIA DE 22
R-DC-91 PROPUESTA DE TRABAJO DE GRADO VERSIÓN: 01
Realizar 16 1
9 respectivas 0%
pruebas.
Redactar el 17 3
1 manual de partes,
0
diseño, 0%
programación y
posibles mejoras.
ELABORADO POR: REVISADO POR: APROBADO POR: Asesor de Planeación
Oficina de Investigaciones Soporte al Sistema Integrado de Gestión FECHA DE APROBACIÓN:
PÁGINA 19
DOCENCIA DE 22
R-DC-91 PROPUESTA DE TRABAJO DE GRADO VERSIÓN: 01
4. PRESUPUESTO
Tabla 1. Presupuesto global
Presupuesto global de la propuesta por fuentes de financiación (en miles de pesos)
Fuentes
Rubros Total
U.T.S * Contrapartida**
Talento humano
Materiales y equipos 0 356.100 356.100
Software 0 0 0
Servicios técnicos 0 0 0
Varios 0 10.000 10.000
TOTAL 0 366.100 366.100
Tabla 2. Presupuesto de Talento humanos
Descripción de los gastos de talento humano (en miles de pesos)
Investigador
Formación Función Dedicación Total
/auxiliar
Jorge Saúl Fandiño Director 3
Oscar Ivan Soler Bueno Investigador 8
TOTAL
Tabla 3. Presupuesto materiales y equipos
Descripción de los materiales y equipos que se planean adquirir (en miles de pesos)
Recursos
Material / equipo Justificación Total
U.T.S * Contrapartida**
Lámina de aluminio de Chasís del robot
0 115.000 115.000
400mm x 400mm móvil.
Detección del robot
Sensor ultrasónico SRF02 0 65.000 65.000
contrincante.
Sensor infrarrojo Detección de línea
0 7.400 7.400
QTR-1RC límite del Doyho.
Sensor infrarrojo Detección de línea
0 7.400 7.400
QTR-1RC límite del Doyho.
Sensor infrarrojo Detección de línea
0 7.400 7.400
QTR-1RC límite del Doyho.
Sensor infrarrojo Detección de línea
0 7.400 7.400
QTR-1RC límite del Doyho.
Par de ruedas de
Sistema motriz. 0 19.900 19.900
neopreno NFT-03
Baquelita virgen Circuito principal. 0 8.100 8.100
Microcontrolador Sistema de control
0 18.700 18.700
PIC18F2550 del robot.
Micromotor Sistema motriz. 0 49.900 49.900
Micromotor Sistema motriz. 0 49.900 49.900
TOTAL 0 356.100 356.100
ELABORADO POR: REVISADO POR: APROBADO POR: Asesor de Planeación
Oficina de Investigaciones Soporte al Sistema Integrado de Gestión FECHA DE APROBACIÓN:
PÁGINA 20
DOCENCIA DE 22
R-DC-91 PROPUESTA DE TRABAJO DE GRADO VERSIÓN: 01
Tabla 4. Presupuesto software
Descripción del software requerido (en miles de pesos)
Recursos
Software Justificación Total
U.T.S * Contrapartida**
Micro code Programación del algoritmo
0 0 0
studio del robot.
TOTAL 0 0 0
Tabla 5. Presupuesto servicios técnicos
Descripción de los servicios técnicos requeridos (en miles de pesos)
Recursos
Servicio Justificación Total
U.T.S * Contrapartida**
TOTAL 0 0 0
Tabla 6. Presupuesto de gastos varios
Descripción de los gastos varios (en miles de pesos)
Recursos
Varios Justificación Total
U.T.S * Contrapartida**
Transporte para realizar
1 0 10.000 10.000
compra de materiales
TOTAL 0 10.000 10.000
* Los gastos UTS están contemplados dentro del inventario de equipos que ésta ya posee y de la nómina
de la institución.
** Los valores de contrapartida son asumidos por los proponentes del trabajo de grado.
ELABORADO POR: REVISADO POR: APROBADO POR: Asesor de Planeación
Oficina de Investigaciones Soporte al Sistema Integrado de Gestión FECHA DE APROBACIÓN:
PÁGINA 21
DOCENCIA DE 22
R-DC-91 PROPUESTA DE TRABAJO DE GRADO VERSIÓN: 01
5. REFERENCIAS BIBLIOGRÁFICAS
Universidad de Investigación y Desarrollo. (2017). Reglamento minisumo. Bucaramanga
Recuperado de
http://www.udi.edu.co/robotica/wp-content/uploads/2017/07/Reglamento-minisumo-2017-
v1.pdf.
All Japan Robot. (2018). All Japan Robot-sumo tournament. Recuperado de
https://www.fsi.co.jp/sumo/index.html.
inisumo. Bogotá. RUNIBOT
Red universitaria - UNIBOT. (5 de marzo de 2018). Robot M
Recuperado de
https://docs.wixstatic.com/ugd/33c665_d282272fb0fc4891b352a25c9321d82e.pdf.
Ardila, E. (4 de marzo de 2018). Colegio San P
edro, cuarto e
n t orneo de r obótica d
e J apón.
Bucaramanga, Santander. Vanguardia liberal. Recuperado de
http://www.vanguardia.com/area-metropolitana/bucaramanga/426289-colegio-san-pedro-
cuarto-en-torneo-de-robotica-de-japon.
ELABORADO POR: REVISADO POR: APROBADO POR: Asesor de Planeación
Oficina de Investigaciones Soporte al Sistema Integrado de Gestión FECHA DE APROBACIÓN:
PÁGINA 22
DOCENCIA DE 22
R-DC-91 PROPUESTA DE TRABAJO DE GRADO VERSIÓN: 01
Ardila, E. (3 de Octubre de 2017). La UDI ganó el Torneo Internacional de Robótica.
www.vanguardia.com. Vanguardia Liberal Recuperado de
http://www.vanguardia.com/area-metropolitana/bucaramanga/411407-la-udi-gano-el-torn
eo-internacional-de-robotica.
Sánchez, E. (18 de Noviembre de 2017). Robótica, una pasión que se vive en 17 Instituciones
Educativas oficiales de Bucaramanga. www.bucaramanga.gov.co. Alcaldía de
Bucaramanga Recuperado de
https://www.bucaramanga.gov.co/noticias/robotica-una-pasion-que-se-vive-en-17-instituc
iones-educativas-oficiales-de-bucaramanga/.
Cook, D. (2010). Intermediate Robot Building. Estados Unidos de América: Apress.
Miles, P. (2002). Build Your Own Combat Robot. Estados Unidos de América: McGraw-Hill.
Craig, J. (2006). Robótica. Reino Unido: Pearson education.
Barbadillo, G. (2012). Proyecto Arduino: Sumo robótico.
Mont, M. (2017). Diseño y programación de un robot minisumo con Arduino.
ELABORADO POR: REVISADO POR: APROBADO POR: Asesor de Planeación
Oficina de Investigaciones Soporte al Sistema Integrado de Gestión FECHA DE APROBACIÓN:
Você também pode gostar
- Turbina PeltonDocumento8 páginasTurbina Peltoncarlos eduardo quijanoAinda não há avaliações
- Vibraciones MecanicasDocumento2 páginasVibraciones Mecanicascarlos eduardo quijanoAinda não há avaliações
- Proyecto Taladro AutomatizadoDocumento22 páginasProyecto Taladro Automatizadocarlos eduardo quijanoAinda não há avaliações
- Estado Del Arte Del Uso de La Osmosis ReDocumento11 páginasEstado Del Arte Del Uso de La Osmosis ReSebastian AcostaAinda não há avaliações
- Lavadora EdgarCariacioloDocumento2 páginasLavadora EdgarCariaciolocarlos eduardo quijanoAinda não há avaliações
- Trabajo VibracionesDocumento7 páginasTrabajo Vibracionescarlos eduardo quijanoAinda não há avaliações
- Laboratorio#1 TransferDocumento3 páginasLaboratorio#1 Transfercarlos eduardo quijanoAinda não há avaliações
- Desarrollo Infantil Primer Año de Vida Interacciones PDFDocumento12 páginasDesarrollo Infantil Primer Año de Vida Interacciones PDFMaría Pastor MayorAinda não há avaliações
- Manual de ConvivenciaDocumento2 páginasManual de ConvivenciaMypuerto TuraAinda não há avaliações
- Diseño de Una Planta Deshidratadora de Banano Usando Secador de Gabinetes para La Producción de HarinaDocumento6 páginasDiseño de Una Planta Deshidratadora de Banano Usando Secador de Gabinetes para La Producción de HarinajuniorAinda não há avaliações
- Clasificación de los 17 órdenes de AscomycotaDocumento47 páginasClasificación de los 17 órdenes de AscomycotaAndreita LunaAinda não há avaliações
- Programa de Tecnicas y Edad MinimaDocumento13 páginasPrograma de Tecnicas y Edad Minimajuanma.prados1543Ainda não há avaliações
- M1 - T1 - Act - 1 Tipos de Violencia EscolarDocumento1 páginaM1 - T1 - Act - 1 Tipos de Violencia EscolarYEDYAinda não há avaliações
- Triptico de Psicolgia Del AprendizajeDocumento2 páginasTriptico de Psicolgia Del AprendizajeJessica MitoskyAinda não há avaliações
- Plan de Continuidad Del NegocioDocumento5 páginasPlan de Continuidad Del NegocioCarolina BaronAinda não há avaliações
- Contempo LDocumento2 páginasContempo LGiovanna ChaniAinda não há avaliações
- Decálogo del perfecto cuentistaDocumento7 páginasDecálogo del perfecto cuentistaAna Rita VillarAinda não há avaliações
- Evaluacion de La Calidad de Pan A Base de Harina de ChiaDocumento3 páginasEvaluacion de La Calidad de Pan A Base de Harina de ChiaRoberto BocanegraAinda não há avaliações
- Proyecto Carro SolarDocumento33 páginasProyecto Carro SolaryvanAinda não há avaliações
- Auditoría patrimonio Distribuidora AlimentosDocumento88 páginasAuditoría patrimonio Distribuidora AlimentosMendoza ElmerAinda não há avaliações
- GOOGLEDocumento37 páginasGOOGLEGiovanni Agustin JacintoAinda não há avaliações
- Plantea, Hipot, Probl Obj Antec Marco Tabla Metodologia 6-7Documento27 páginasPlantea, Hipot, Probl Obj Antec Marco Tabla Metodologia 6-7Celeste ValverdeAinda não há avaliações
- Segunda Distribución Año 2017. Eduardo SierraDocumento34 páginasSegunda Distribución Año 2017. Eduardo SierraAlfredo CasanovaAinda não há avaliações
- Conta de Gerencia Preguntas LaboratorioDocumento3 páginasConta de Gerencia Preguntas LaboratorioPaul Dalhy ZapataAinda não há avaliações
- Martha Alles Capitulo 9Documento3 páginasMartha Alles Capitulo 9Melina Guidi0% (1)
- Devocional 5 JobDocumento6 páginasDevocional 5 JobElizzabethAinda não há avaliações
- CIENCIAS. GUÍA 2. Grado Primero. SEGUNDO PERÍODO PDFDocumento5 páginasCIENCIAS. GUÍA 2. Grado Primero. SEGUNDO PERÍODO PDFNatalia Hernández ArteagaAinda não há avaliações
- LOPE - NovelistaDocumento17 páginasLOPE - Novelistakerba25Ainda não há avaliações
- Manual de Mantenimiento Chevrolet Spark 59c555341723dde1926fb9a9Documento2 páginasManual de Mantenimiento Chevrolet Spark 59c555341723dde1926fb9a9Adrian Diaz0% (1)
- Bavette - Es-Tarta de Limón y Merengue SuizoDocumento4 páginasBavette - Es-Tarta de Limón y Merengue SuizoDulce RamirezAinda não há avaliações
- Filosof+¡a, Qu+® Es Eso. SAVATER. Hist. Filos.Documento5 páginasFilosof+¡a, Qu+® Es Eso. SAVATER. Hist. Filos.Gonzalo DiazAinda não há avaliações
- Generalidades de Los Pulmones y ToraxDocumento7 páginasGeneralidades de Los Pulmones y ToraxXitlalyEsparzaAinda não há avaliações
- Tema 1 - La Ilustración y La EducaciónDocumento6 páginasTema 1 - La Ilustración y La Educaciónluis 2002Ainda não há avaliações
- Medicina Alternativa Origen de La Medicina Naturista y Su Papel en El Mundo ContemporáneoDocumento3 páginasMedicina Alternativa Origen de La Medicina Naturista y Su Papel en El Mundo ContemporáneoIjo_Barapetu100% (1)
- Recetas EntulineaDocumento47 páginasRecetas EntulineaGemaAinda não há avaliações
- Ergonomía - Parametros Diseño PTDocumento18 páginasErgonomía - Parametros Diseño PTMirian TipánAinda não há avaliações
- Valvula de Agua BELIMODocumento4 páginasValvula de Agua BELIMOJesús MarquinaAinda não há avaliações