Você também pode gostar
- BIO 328 Full Semester PackageDocumento25 páginasBIO 328 Full Semester PackageNerdy Notes Inc.Ainda não há avaliações
- Can We Make Genetic Algorithms Work in High-Dimensionality Problems?Documento17 páginasCan We Make Genetic Algorithms Work in High-Dimensionality Problems?kilo929756Ainda não há avaliações
- Similar PaperDocumento8 páginasSimilar Papertech guruAinda não há avaliações
- Sparse Signal Reconstruction From Limited Data Using FOCUSS: A Re-Weighted Minimum Norm AlgorithmDocumento17 páginasSparse Signal Reconstruction From Limited Data Using FOCUSS: A Re-Weighted Minimum Norm AlgorithmRoronoaAinda não há avaliações
- First-And Second-Order Methods Learning: Between Steepest Descent and Newton's MethodDocumento26 páginasFirst-And Second-Order Methods Learning: Between Steepest Descent and Newton's MethodEma VidovikAinda não há avaliações
- Nonlinear Parameter Estimation The Genetic Algorithm: Leehter Yao, William A. SetharesDocumento9 páginasNonlinear Parameter Estimation The Genetic Algorithm: Leehter Yao, William A. SetharesJack IbrahimAinda não há avaliações
- Locally Linear Support Vector Machines: ( 1, 1) The Task Is To Estimate The Label yDocumento8 páginasLocally Linear Support Vector Machines: ( 1, 1) The Task Is To Estimate The Label yEZ112Ainda não há avaliações
- Chapter - 1: Another Problem During The Time of Optimizing Any Objective FunctionsDocumento14 páginasChapter - 1: Another Problem During The Time of Optimizing Any Objective FunctionsHossein HosseinAinda não há avaliações
- Understanding Interactions Among Genetic Algorithm ParametersDocumento17 páginasUnderstanding Interactions Among Genetic Algorithm ParametersbarbieAinda não há avaliações
- Using Genetic Algorithm To Optimize Artificial Neural Network A Case Study On Earthquake PredictionDocumento4 páginasUsing Genetic Algorithm To Optimize Artificial Neural Network A Case Study On Earthquake PredictionYulianto Tejo PutrantoAinda não há avaliações
- Genetic Algorithm Optimization and Its Application To Antenna DesignDocumento4 páginasGenetic Algorithm Optimization and Its Application To Antenna DesignÉtoile FilanteAinda não há avaliações
- Large Margin Classification Using The Perceptron Algorithm: Machine Learning, 37 (3) :277-296, 1999Documento19 páginasLarge Margin Classification Using The Perceptron Algorithm: Machine Learning, 37 (3) :277-296, 1999Saiful Nur BudimanAinda não há avaliações
- Data Clustering Using Kernel BasedDocumento6 páginasData Clustering Using Kernel BasedijitcajournalAinda não há avaliações
- 08 Chapter 5Documento40 páginas08 Chapter 5smaranikapriyadarsini49Ainda não há avaliações
- Application of The Genetic Algorithm To Investigate Nanostructures of Gaas/Algaas Quantum WellsDocumento5 páginasApplication of The Genetic Algorithm To Investigate Nanostructures of Gaas/Algaas Quantum Wellschetan2042Ainda não há avaliações
- Dietmar Heinke and Fred H. Hamker - Comparing Neural Networks: A Benchmark On Growing Neural Gas, Growing Cell Structures, and Fuzzy ARTMAPDocumento13 páginasDietmar Heinke and Fred H. Hamker - Comparing Neural Networks: A Benchmark On Growing Neural Gas, Growing Cell Structures, and Fuzzy ARTMAPTuhmaAinda não há avaliações
- Best Generalisation Error PDFDocumento28 páginasBest Generalisation Error PDFlohit12Ainda não há avaliações
- Thesis Genetic AlgorithmDocumento7 páginasThesis Genetic Algorithmcarmensanbornmanchester100% (1)
- Adaptation of Genetic Algorithm Parameters Based On Fuzzy Logic Controllers - Herrera, LozanoDocumento31 páginasAdaptation of Genetic Algorithm Parameters Based On Fuzzy Logic Controllers - Herrera, LozanoIgnacioMoya MorenoAinda não há avaliações
- A Hybrid Artificial Bee Colony Algorithmic Approach For Classification Using Neural NetworksDocumento24 páginasA Hybrid Artificial Bee Colony Algorithmic Approach For Classification Using Neural NetworksVishnu DeepakAinda não há avaliações
- RePAMO PDFDocumento19 páginasRePAMO PDFRonald JosephAinda não há avaliações
- An Improved Genetic Algorithm and Its Blending Application With Neural NetworkDocumento3 páginasAn Improved Genetic Algorithm and Its Blending Application With Neural NetworkVishnu S. M. YarlagaddaAinda não há avaliações
- Ga 1Documento15 páginasGa 1Sumala G LakshmiAinda não há avaliações
- Afshar 2008Documento23 páginasAfshar 2008بلقاسم جلاليAinda não há avaliações
- Combined Use of Genetic Algorithm and Gradient Optimization Methods For Unit Commitment ResolutionDocumento15 páginasCombined Use of Genetic Algorithm and Gradient Optimization Methods For Unit Commitment ResolutionSahbi MarrouchiAinda não há avaliações
- Final GNGDocumento42 páginasFinal GNGsyuehAinda não há avaliações
- Large Margins Using Percept RonDocumento19 páginasLarge Margins Using Percept RonbenavidesjabeichAinda não há avaliações
- Application of Improved Genetic Algorithm in Ultrasonic Locationof Transformer Partial DischargeDocumento10 páginasApplication of Improved Genetic Algorithm in Ultrasonic Locationof Transformer Partial DischargeNicolas MoreiraAinda não há avaliações
- Inverse Kinematics of Redundant Robots Using Genetic AlgorithmsDocumento6 páginasInverse Kinematics of Redundant Robots Using Genetic AlgorithmskraskromAinda não há avaliações
- Multiple Sequence Alignment Using Modified Dynamic Programming and Particle Swarm Optimization (Journal of The Chinese Institute of Engineers)Documento15 páginasMultiple Sequence Alignment Using Modified Dynamic Programming and Particle Swarm Optimization (Journal of The Chinese Institute of Engineers)wsjuangAinda não há avaliações
- 1.1A Genetic Algorithms and Their Applications in Environmental SciencesDocumento8 páginas1.1A Genetic Algorithms and Their Applications in Environmental SciencesTony WalleAinda não há avaliações
- Ga Based Neural Network Modeling of Nox Emission in A Coal-Fired Power Generation PlantDocumento6 páginasGa Based Neural Network Modeling of Nox Emission in A Coal-Fired Power Generation PlantSugesh GovindAinda não há avaliações
- A New Approximate Maximal Margin ClassificationDocumento30 páginasA New Approximate Maximal Margin ClassificationAnurag SharmaAinda não há avaliações
- A Modified Genetic Algorithm For Resource ConstraiDocumento5 páginasA Modified Genetic Algorithm For Resource ConstraiObemfalAinda não há avaliações
- RiceDocumento2 páginasRicemeenuAinda não há avaliações
- Adaptive DEDocumento6 páginasAdaptive DEHafizAinda não há avaliações
- Multiobjective Genetic Algorithms Applied To Solve Optimization ProblemsDocumento4 páginasMultiobjective Genetic Algorithms Applied To Solve Optimization ProblemsSidney LinsAinda não há avaliações
- MLP LearningDocumento13 páginasMLP Learningjkl316Ainda não há avaliações
- Genetic Algorithms For Optimum Designing of Fuzzy ControllersDocumento6 páginasGenetic Algorithms For Optimum Designing of Fuzzy ControllersLukas NurHappyAinda não há avaliações
- Online Learning With Kernels: Jyrki Kivinen, Alexander J. Smola, and Robert C. Williamson, Member, IEEEDocumento12 páginasOnline Learning With Kernels: Jyrki Kivinen, Alexander J. Smola, and Robert C. Williamson, Member, IEEEimadus2Ainda não há avaliações
- A Study of Neural Network Algorithms: Namrata AnejaDocumento3 páginasA Study of Neural Network Algorithms: Namrata Anejawww.irjes.comAinda não há avaliações
- C (JX, C (J, C (JX, C (JI, J-C (Ji, J) Max (C (Ji-L, J), C (Ji, j-1) ) +P (JiDocumento9 páginasC (JX, C (J, C (JX, C (JI, J-C (Ji, J) Max (C (Ji-L, J), C (Ji, j-1) ) +P (JiOlivia brianneAinda não há avaliações
- Machine Learning by Tom Mitchell - DefinitionsDocumento12 páginasMachine Learning by Tom Mitchell - DefinitionsPonambalam VilashiniAinda não há avaliações
- The Implementation of A Hidden Markov MoDocumento14 páginasThe Implementation of A Hidden Markov MoFito RhAinda não há avaliações
- An Introduction To Genetic...Documento9 páginasAn Introduction To Genetic...Manohar KoduriAinda não há avaliações
- Final Thesis Pk12Documento97 páginasFinal Thesis Pk12Suman PradhanAinda não há avaliações
- Stability and Generalization: CMAP, Ecole Polytechnique F-91128 Palaiseau, FRANCEDocumento28 páginasStability and Generalization: CMAP, Ecole Polytechnique F-91128 Palaiseau, FRANCEBlaise HanczarAinda não há avaliações
- Exploiting A Workstation Network For Automatic Generation of Test Patterns For Digital CircuitsDocumento17 páginasExploiting A Workstation Network For Automatic Generation of Test Patterns For Digital CircuitsDhwal MehtaAinda não há avaliações
- Training Feed Forward NN With Genetic AlgoDocumento6 páginasTraining Feed Forward NN With Genetic Algosriram_vikrantAinda não há avaliações
- Local Minimim PaperDocumento10 páginasLocal Minimim PaperShakeel AhmedAinda não há avaliações
- The Use of Genetic Algorithms in Finite Element Model IdentificationDocumento8 páginasThe Use of Genetic Algorithms in Finite Element Model IdentificationMilena PopovicAinda não há avaliações
- 901-904 IJER - 2016 - 1210 P V S Sudheer CDocumento4 páginas901-904 IJER - 2016 - 1210 P V S Sudheer CInnovative Research PublicationsAinda não há avaliações
- Akyuz - Birbil (2021) - Discovering Classification Rules For Interpretable Learning With Linear Programming-1Documento16 páginasAkyuz - Birbil (2021) - Discovering Classification Rules For Interpretable Learning With Linear Programming-1Nishanth TAinda não há avaliações
- Markov Chain Monte Carlo Combined With Deterministic Methods For Markov Random Field OptimizationDocumento8 páginasMarkov Chain Monte Carlo Combined With Deterministic Methods For Markov Random Field OptimizationLovely BabuAinda não há avaliações
- Alkylation 2Documento22 páginasAlkylation 2aysar JarullahAinda não há avaliações
- 18 Aos1715Documento33 páginas18 Aos1715aprilvee1222Ainda não há avaliações
- Bitcoin ModulesDocumento7 páginasBitcoin ModulesAnonymous vEkqfNAinda não há avaliações
- Efficient Solution Algorithms For Factored MdpsDocumento70 páginasEfficient Solution Algorithms For Factored MdpsĐạt Hoàng LễAinda não há avaliações
- IJOGST - Volume 7 - Issue 1 - Pages 60-69 PDFDocumento10 páginasIJOGST - Volume 7 - Issue 1 - Pages 60-69 PDFsina giahkarAinda não há avaliações
- A Stochastic Algorithm For Feature Selection in Pattern RecognitionDocumento39 páginasA Stochastic Algorithm For Feature Selection in Pattern RecognitionBartoszSowulAinda não há avaliações
- Radial Basis Networks: Fundamentals and Applications for The Activation Functions of Artificial Neural NetworksNo EverandRadial Basis Networks: Fundamentals and Applications for The Activation Functions of Artificial Neural NetworksAinda não há avaliações
- JF 24 PDFDocumento6 páginasJF 24 PDFjkl316Ainda não há avaliações
- NSGA - 2 TutorialDocumento20 páginasNSGA - 2 Tutorialnim1987Ainda não há avaliações
- Paper Schedulling Ruiz y MarotoDocumento20 páginasPaper Schedulling Ruiz y Marotojkl316Ainda não há avaliações
- Tabu SearchDocumento6 páginasTabu Searchjkl316Ainda não há avaliações
- Tabu Search PDFDocumento294 páginasTabu Search PDFjkl316Ainda não há avaliações
- A Hybrid Tabu-SA Algorithm For Location-Inventory Model With Considering Capacity Levels and Uncertain DemandsDocumento15 páginasA Hybrid Tabu-SA Algorithm For Location-Inventory Model With Considering Capacity Levels and Uncertain Demandsjkl316Ainda não há avaliações
- Core-Generating Approximate Minimum Entropy Discretization For Rough Set Feature Selection in Pattern ClassificationDocumento18 páginasCore-Generating Approximate Minimum Entropy Discretization For Rough Set Feature Selection in Pattern Classificationjkl316Ainda não há avaliações
- Optimization of Neural Networks: A Comparative Analysis of The Genetic Algorithm and Simulated AnnealingDocumento28 páginasOptimization of Neural Networks: A Comparative Analysis of The Genetic Algorithm and Simulated Annealingjkl316Ainda não há avaliações
- SymbrainDocumento26 páginasSymbrainCaterina CarboneAinda não há avaliações
- Created by Neevia Docuprinter Trial Version Created by Neevia Docuprinter Trial VersionDocumento7 páginasCreated by Neevia Docuprinter Trial Version Created by Neevia Docuprinter Trial Versionjkl316Ainda não há avaliações
- Information Sciences: Doina BucurDocumento16 páginasInformation Sciences: Doina Bucurjkl316Ainda não há avaliações
- TU Berka-Rauch PaperDocumento30 páginasTU Berka-Rauch Paperjkl316Ainda não há avaliações
- Sabp PDFDocumento25 páginasSabp PDFjkl316Ainda não há avaliações
- Core-Generating Approximate Minimum Entropy Discretization For Rough Set Feature Selection in Pattern ClassificationDocumento8 páginasCore-Generating Approximate Minimum Entropy Discretization For Rough Set Feature Selection in Pattern Classificationjkl316Ainda não há avaliações
- Microsoft Word - JCD FinalDocumento8 páginasMicrosoft Word - JCD Finaljkl316Ainda não há avaliações
- I Jcs It 2014050535Documento5 páginasI Jcs It 2014050535jkl316Ainda não há avaliações
- Grue AssocDocumento65 páginasGrue Assocjkl316Ainda não há avaliações
- Knowledge Discovery With Genetic Programming For Providing Feedback To Courseware AuthorsDocumento40 páginasKnowledge Discovery With Genetic Programming For Providing Feedback To Courseware Authorsjkl316Ainda não há avaliações
- Algorithms For Association Rule Mining - A General Survey and ComparisonDocumento7 páginasAlgorithms For Association Rule Mining - A General Survey and Comparisonjkl316Ainda não há avaliações
- Multiple Criteria Decision Analysis Using A Likelihood-Based Outranking Method Based On Interval-Valued Intuitionistic Fuzzy SetsDocumento21 páginasMultiple Criteria Decision Analysis Using A Likelihood-Based Outranking Method Based On Interval-Valued Intuitionistic Fuzzy Setsjkl316Ainda não há avaliações
- The Use of Evolutionary Algorithms in Data MiningDocumento29 páginasThe Use of Evolutionary Algorithms in Data Miningjkl316Ainda não há avaliações
- Graph Based Approaches Used in Association Rule MiningDocumento64 páginasGraph Based Approaches Used in Association Rule MiningNguyen Van HuyAinda não há avaliações
- Design of Fuzzy Rule-Based Classifiers With Semantic CointensionDocumento17 páginasDesign of Fuzzy Rule-Based Classifiers With Semantic Cointensionjkl316Ainda não há avaliações
- Multiobjective Optimization Based On ReputationDocumento22 páginasMultiobjective Optimization Based On Reputationjkl316Ainda não há avaliações
- Generalized Association Rule Mining Using Genetic AlgorithmsDocumento11 páginasGeneralized Association Rule Mining Using Genetic AlgorithmsAnonymous TxPyX8cAinda não há avaliações
- Genetic Algorithms For Multi-Criterion Classification and Clustering in Data MiningDocumento12 páginasGenetic Algorithms For Multi-Criterion Classification and Clustering in Data Miningjkl316Ainda não há avaliações
- Validationofassociationrulemining ACI2013 Wright SittigDocumento10 páginasValidationofassociationrulemining ACI2013 Wright Sittigjkl316Ainda não há avaliações
- Genetic Algorithms Rule Discovery Data Mining: For inDocumento7 páginasGenetic Algorithms Rule Discovery Data Mining: For injkl316Ainda não há avaliações
- Design of Fuzzy Rule-Based Classifiers With Semantic CointensionDocumento17 páginasDesign of Fuzzy Rule-Based Classifiers With Semantic Cointensionjkl316Ainda não há avaliações
- Fuzzy Rule Base Ensemble Generated From Data by Linguistic Associations MiningDocumento22 páginasFuzzy Rule Base Ensemble Generated From Data by Linguistic Associations Miningjkl316Ainda não há avaliações
- The Truth About Honey - White Paper PDFDocumento5 páginasThe Truth About Honey - White Paper PDFSergio PérezAinda não há avaliações
- Nominalization (Exercise)Documento2 páginasNominalization (Exercise)KryzQuinonesAinda não há avaliações
- EuglenidDocumento4 páginasEuglenidx456456456xAinda não há avaliações
- 300 One Word Substitutions Asked in SSC IBPS UPSC ExamDocumento12 páginas300 One Word Substitutions Asked in SSC IBPS UPSC ExamRashid AliAinda não há avaliações
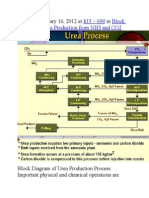
- Published January 16, 2012 at In: 813 × 699 Block Diagram of Urea Production From NH3 and CO2Documento9 páginasPublished January 16, 2012 at In: 813 × 699 Block Diagram of Urea Production From NH3 and CO2himanshuchawla654Ainda não há avaliações
- Human Genome Editing: Science, Ethics, and GovernanceDocumento261 páginasHuman Genome Editing: Science, Ethics, and GovernanceAnonymous 6VKlaeigViAinda não há avaliações
- Approved LaboratoriesDocumento22 páginasApproved LaboratoriesPaul CAinda não há avaliações
- Ovulation CalanderDocumento2 páginasOvulation CalanderBN NGAinda não há avaliações
- Veterinary Gross Anatomy Female Genital TractDocumento10 páginasVeterinary Gross Anatomy Female Genital TractTatenda MagejaAinda não há avaliações
- Jellyfish Research PaperDocumento6 páginasJellyfish Research Papergzrvpcvnd100% (1)
- Science of The Total Environment: Megan Carve Graeme Allinson, Dayanthi Nugegoda, Jeff ShimetaDocumento16 páginasScience of The Total Environment: Megan Carve Graeme Allinson, Dayanthi Nugegoda, Jeff ShimetaFABIANA PASSAMANIAinda não há avaliações
- Fundamental Aspects of Sitting and StandingDocumento2 páginasFundamental Aspects of Sitting and StandingMeenakshi SinghAinda não há avaliações
- Social IntelligenceDocumento10 páginasSocial IntelligencePeterMarquezAinda não há avaliações
- BIOL 3121 - Lecture 13 - 081116Documento91 páginasBIOL 3121 - Lecture 13 - 081116Sara HuebnerAinda não há avaliações
- Reprogramming Microbes To Be Pathogen-Seeking KillersDocumento10 páginasReprogramming Microbes To Be Pathogen-Seeking Killerstian luoAinda não há avaliações
- Qualitative and QuantitativeDocumento2 páginasQualitative and Quantitativetimmierivera100% (1)
- Identification and Habitat Type of Mudskipper (Family: Gobiidae) at The Bali Beach, District of Batu Bara, North Sumatra ProvinceDocumento7 páginasIdentification and Habitat Type of Mudskipper (Family: Gobiidae) at The Bali Beach, District of Batu Bara, North Sumatra ProvinceFikran 31nusiAinda não há avaliações
- Tomasello, M. (2000) - Culture and Cognitive Development.Documento4 páginasTomasello, M. (2000) - Culture and Cognitive Development.Roberto OcampoAinda não há avaliações
- Cat ExamDocumento25 páginasCat Examlahsivlahsiv684Ainda não há avaliações
- Ch8 (C)Documento28 páginasCh8 (C)fkjujAinda não há avaliações
- The 12 Untapped Targets To Ignite New Muscle GrowthDocumento68 páginasThe 12 Untapped Targets To Ignite New Muscle Growthace_mimAinda não há avaliações
- Kimia Daun PandanDocumento4 páginasKimia Daun Pandanlutfi_alhayathullahAinda não há avaliações
- Third Stage Begg MechanotherapyDocumento32 páginasThird Stage Begg MechanotherapyNaziya ShaikAinda não há avaliações
- AP Biology Practice Exam: Section I: Multiple-Choice QuestionsDocumento83 páginasAP Biology Practice Exam: Section I: Multiple-Choice QuestionsKamilla DzhanzakovaAinda não há avaliações
- The Butterfly Circus Worksheet Activity - 68134Documento3 páginasThe Butterfly Circus Worksheet Activity - 68134Hellguz ArtAinda não há avaliações
- Recognition, Signaling, and Repair of DNA Double-Strand Breaks Produced by Ionizing Radiation in Mammalian Cells - The Molecular ChoreographyDocumento89 páginasRecognition, Signaling, and Repair of DNA Double-Strand Breaks Produced by Ionizing Radiation in Mammalian Cells - The Molecular ChoreographyMaria ClaraAinda não há avaliações
- Anatomy ReviewerDocumento5 páginasAnatomy ReviewerPHILYP EPHRAIM PARANGALANAinda não há avaliações
- Class XI Half SlybussDocumento10 páginasClass XI Half SlybussDevansh AgarwalAinda não há avaliações
- Alvin MDocumento2 páginasAlvin MRunmel Emmanuel Ramal DampiosAinda não há avaliações