Você também pode gostar
- Land Survey by RobotDocumento11 páginasLand Survey by RobotIAEME PublicationAinda não há avaliações
- Experience On Using Total Station Surveying For Mapping and ContouringDocumento13 páginasExperience On Using Total Station Surveying For Mapping and ContouringIAEME PublicationAinda não há avaliações
- Total Station PDFDocumento19 páginasTotal Station PDFnirupadi9535Ainda não há avaliações
- Design and Development of Autonomous Ground Vehicle For Wild Life MonitoringDocumento8 páginasDesign and Development of Autonomous Ground Vehicle For Wild Life MonitoringJeevan KumarAinda não há avaliações
- Warehouse Management BOT Using ArduinoDocumento6 páginasWarehouse Management BOT Using ArduinoIJRASETPublicationsAinda não há avaliações
- Technical Department: The Institution of Engineers (India) R&D Grant-In-Aid SchemeDocumento9 páginasTechnical Department: The Institution of Engineers (India) R&D Grant-In-Aid SchemeSai Ram Prasad ReddyAinda não há avaliações
- Path Planning and Controlling of Omni-Directional Robot Using Cartesian Odometry and PID AlgorithmDocumento6 páginasPath Planning and Controlling of Omni-Directional Robot Using Cartesian Odometry and PID AlgorithmZaki HafdiAinda não há avaliações
- JK Lakshmipat University: Seminar Draft Report On Total Station SurveyDocumento18 páginasJK Lakshmipat University: Seminar Draft Report On Total Station Surveyfreddy ramdinAinda não há avaliações
- W F P C A UAV: Aypoint Light Arameter Omparison of AN UtonomousDocumento11 páginasW F P C A UAV: Aypoint Light Arameter Omparison of AN UtonomousAdam HansenAinda não há avaliações
- Electrical Inspection and Autometed Robot For Electrical Transmission Line InspectionDocumento5 páginasElectrical Inspection and Autometed Robot For Electrical Transmission Line InspectionIJRASETPublicationsAinda não há avaliações
- Total Station Surveying: May 2011 CE 271Documento16 páginasTotal Station Surveying: May 2011 CE 271masterat0rAinda não há avaliações
- AttachmentDocumento13 páginasAttachmentShaik MunnaAinda não há avaliações
- Advanced Techniques Used in Surveying: Total Station, GPS, GIS, Drone Arial SurveyDocumento7 páginasAdvanced Techniques Used in Surveying: Total Station, GPS, GIS, Drone Arial SurveyAjayKumarAinda não há avaliações
- Final 1Documento41 páginasFinal 1Sumana Sudhakara100% (1)
- 50 DesigningDocumento7 páginas50 DesigningYoftahiAinda não há avaliações
- 2 - No Parking AlertDocumento6 páginas2 - No Parking Alertعمل الخيرAinda não há avaliações
- Omni Wheels Robot For Effective Surveillance and Transportation PurposeDocumento8 páginasOmni Wheels Robot For Effective Surveillance and Transportation PurposeIJRASETPublicationsAinda não há avaliações
- 3D-Odometry For Rough Terrain - Towards Real 3D Navigation: Pierre Lamon and Roland SiegwartDocumento7 páginas3D-Odometry For Rough Terrain - Towards Real 3D Navigation: Pierre Lamon and Roland SiegwartTrương Đức BìnhAinda não há avaliações
- Paper K Has 2014Documento14 páginasPaper K Has 2014Selewa TimesAinda não há avaliações
- 7.total Station Basics For ArchDocumento11 páginas7.total Station Basics For ArchAlex Wilson100% (2)
- Total ServerDocumento13 páginasTotal ServerBakhtiyar Q.KhawajaAinda não há avaliações
- Design and ImplementationDocumento4 páginasDesign and ImplementationInternational Journal of Innovative Science and Research TechnologyAinda não há avaliações
- Design and Fabrication of 3-DOF Robot Arm Using Parallelogram MechanismsDocumento6 páginasDesign and Fabrication of 3-DOF Robot Arm Using Parallelogram MechanismsWARSE JournalsAinda não há avaliações
- Unmanned Aerial Vehicle Technology For Low Cost Landslide MappingDocumento10 páginasUnmanned Aerial Vehicle Technology For Low Cost Landslide MappingAnonymous WjqAsHAinda não há avaliações
- Implementation of 6-DOF Biped Footstep Planning Under Different Terrain ConditionsDocumento6 páginasImplementation of 6-DOF Biped Footstep Planning Under Different Terrain ConditionsC SYAHBANAAinda não há avaliações
- Sensors: Low Cost and Flexible UAV Deployment of SensorsDocumento13 páginasSensors: Low Cost and Flexible UAV Deployment of SensorsFábio HenriqueAinda não há avaliações
- Ijdmt: ©iaemeDocumento13 páginasIjdmt: ©iaemeIAEME PublicationAinda não há avaliações
- Development and Experimental Validation of An Adaptive Extended Kalman Filter For The Localization of Mobile RobotsDocumento11 páginasDevelopment and Experimental Validation of An Adaptive Extended Kalman Filter For The Localization of Mobile RobotsAnderson OliveiraAinda não há avaliações
- Automatic Domestic Vaccum CleanerDocumento5 páginasAutomatic Domestic Vaccum CleanerIJRASETPublicationsAinda não há avaliações
- VCRA Improved.Documento15 páginasVCRA Improved.adwait naikAinda não há avaliações
- IoT Based Antenna Positioning SystemDocumento9 páginasIoT Based Antenna Positioning SystemIJRASETPublicationsAinda não há avaliações
- Smart System of Potholes DetectionDocumento6 páginasSmart System of Potholes DetectionIJRASETPublicationsAinda não há avaliações
- Air Mouse Journal 4Documento6 páginasAir Mouse Journal 4Sowmiya SowmiAinda não há avaliações
- COPPELIASIMDocumento7 páginasCOPPELIASIMRooban SAinda não há avaliações
- Frictionless Bearing TSDocumento16 páginasFrictionless Bearing TS4MH18CS086 Rakesh Mallika SAinda não há avaliações
- 6 - Condition Monitoring and Dynamic Balancing of A Hot Air Circulation Blower by Vibration Tool PDFDocumento10 páginas6 - Condition Monitoring and Dynamic Balancing of A Hot Air Circulation Blower by Vibration Tool PDFaddinulichsanAinda não há avaliações
- 1 PBDocumento7 páginas1 PBFyndi Aw AwAinda não há avaliações
- Jeta V3i3p101Documento3 páginasJeta V3i3p101Slakshmi NarayanaAinda não há avaliações
- Real Time Filter and Fusion of Multi Sensor Data For Localization of Mobile RobotDocumento9 páginasReal Time Filter and Fusion of Multi Sensor Data For Localization of Mobile RobotIAEME PublicationAinda não há avaliações
- Smart Assistance Public Transport SystemDocumento6 páginasSmart Assistance Public Transport SystemIJIERT-International Journal of Innovations in Engineering Research and TechnologyAinda não há avaliações
- Obstacle Detection in Self-Controlled CarsDocumento11 páginasObstacle Detection in Self-Controlled CarsIJRASETPublicationsAinda não há avaliações
- Autonomous Indoor Navigation RobotDocumento14 páginasAutonomous Indoor Navigation RobotRohit P LalAinda não há avaliações
- Wall-Following Using A Kinect Sensor For Corridor Coverage NavigationDocumento6 páginasWall-Following Using A Kinect Sensor For Corridor Coverage NavigationRafiudin DarmawanAinda não há avaliações
- Total Station and Its Application To Civil EngineeringDocumento10 páginasTotal Station and Its Application To Civil EngineeringVB100% (4)
- Agronomy: Assessment of The Cutting Performance of A Robot Mower Using Custom Built SoftwareDocumento15 páginasAgronomy: Assessment of The Cutting Performance of A Robot Mower Using Custom Built SoftwareANDRES RODRIGO VIDARTE RUIZAinda não há avaliações
- Real Time Stabilization of An Eight RotoDocumento9 páginasReal Time Stabilization of An Eight RotoTomislav SertićAinda não há avaliações
- Multipurpose Robotic ArmDocumento7 páginasMultipurpose Robotic ArmIJRASETPublicationsAinda não há avaliações
- SYNOPSISDocumento12 páginasSYNOPSISHitesh sumarwalAinda não há avaliações
- IoT Based Floor Cleaning RobotDocumento6 páginasIoT Based Floor Cleaning RobotIJRASETPublicationsAinda não há avaliações
- Final Year B.tech-Robotics Lab ManualDocumento37 páginasFinal Year B.tech-Robotics Lab ManualHIRSHITHA RAJEEAinda não há avaliações
- Solar Vacum Floor CleaerDocumento6 páginasSolar Vacum Floor CleaerNexgen TechnologyAinda não há avaliações
- IJRTI2304047Documento4 páginasIJRTI2304047Himanshu KumarAinda não há avaliações
- Total StationDocumento13 páginasTotal StationEr Santosh Kapar100% (1)
- Automated Pothole Filling MachineDocumento5 páginasAutomated Pothole Filling MachineIJRASETPublicationsAinda não há avaliações
- Total Station and Its Applications in Surveying - GIS ResourcesDocumento11 páginasTotal Station and Its Applications in Surveying - GIS Resourcesziko52Ainda não há avaliações
- Ijmet: ©iaemeDocumento8 páginasIjmet: ©iaemeIAEME PublicationAinda não há avaliações
- Paper 26Documento5 páginasPaper 26vivekgorasiya32Ainda não há avaliações
- Cellphone Operated Land RoverDocumento56 páginasCellphone Operated Land RoverAnil kumar gaurAinda não há avaliações
- Theoretical method to increase the speed of continuous mapping in a three-dimensional laser scanning system using servomotors controlNo EverandTheoretical method to increase the speed of continuous mapping in a three-dimensional laser scanning system using servomotors controlAinda não há avaliações
- Pragmatic Internet of Everything (IOE) for Smart Cities: 360-Degree PerspectiveNo EverandPragmatic Internet of Everything (IOE) for Smart Cities: 360-Degree PerspectiveAinda não há avaliações
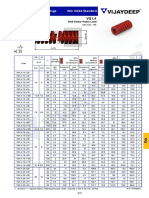
- Rectangular Wire Die Springs ISO-10243 Standard: Red Colour Heavy LoadDocumento3 páginasRectangular Wire Die Springs ISO-10243 Standard: Red Colour Heavy LoadbashaAinda não há avaliações
- Routing Fundamentals: How A Juniper Device Makes Forwarding DecisionsDocumento8 páginasRouting Fundamentals: How A Juniper Device Makes Forwarding DecisionsLarsec LarsecAinda não há avaliações
- Beneparts Quotation BYBJ192388 20191024Documento1 páginaBeneparts Quotation BYBJ192388 20191024احمد عبدهAinda não há avaliações
- D.E.I Technical College, Dayalbagh Agra 5 III Semester Electrical Engg. Electrical Circuits and Measurements Question Bank Unit 1Documento5 páginasD.E.I Technical College, Dayalbagh Agra 5 III Semester Electrical Engg. Electrical Circuits and Measurements Question Bank Unit 1Pritam Kumar Singh100% (1)
- Literature Review 2500 WordsDocumento6 páginasLiterature Review 2500 Wordsvvjrpsbnd100% (1)
- Group H Macroeconomics Germany InflationDocumento13 páginasGroup H Macroeconomics Germany Inflationmani kumarAinda não há avaliações
- Motion To DismissDocumento24 páginasMotion To DismisssandyemerAinda não há avaliações
- 2008 Reverse Logistics Strategies For End-Of-life ProductsDocumento22 páginas2008 Reverse Logistics Strategies For End-Of-life ProductsValen Ramirez HAinda não há avaliações
- LIC Form - Intimation of Death Retirement Leaving ServiceDocumento1 páginaLIC Form - Intimation of Death Retirement Leaving ServicekaustubhAinda não há avaliações
- Water Cooled Centrifugal Chiller (150-3000RT)Documento49 páginasWater Cooled Centrifugal Chiller (150-3000RT)remigius yudhiAinda não há avaliações
- Tarlac - San Antonio - Business Permit - NewDocumento2 páginasTarlac - San Antonio - Business Permit - Newarjhay llave100% (1)
- Media and Information Literacy Quarter 3 Module 1Documento67 páginasMedia and Information Literacy Quarter 3 Module 1Joshua Catequesta100% (1)
- CV Rafi Cargill, GAR, MCR, AM GROUP and Consultancy EraDocumento6 páginasCV Rafi Cargill, GAR, MCR, AM GROUP and Consultancy EranorulainkAinda não há avaliações
- Sarah Williams CVDocumento2 páginasSarah Williams CVsarahcwilliamsAinda não há avaliações
- Ara FormDocumento2 páginasAra Formjerish estemAinda não há avaliações
- Compose Testing CheatsheetDocumento1 páginaCompose Testing CheatsheetEstampados SIn ApellidoAinda não há avaliações
- 11 - Savulescu Et Al (2020) - Equality or Utility. Ethics and Law of Rationing VentilatorsDocumento6 páginas11 - Savulescu Et Al (2020) - Equality or Utility. Ethics and Law of Rationing VentilatorsCorrado BisottoAinda não há avaliações
- Centurion Bank of PunjabDocumento7 páginasCenturion Bank of Punjabbaggamraasi1234Ainda não há avaliações
- Global Review of Enhances Geothermal SystemDocumento20 páginasGlobal Review of Enhances Geothermal SystemKatherine RojasAinda não há avaliações
- COMPLAINT - THE STAN J. CATERBONE 42 U.S.C. 14141 "POLICE MISCONDUCT PROVISION" COMPLAINT TO U.S. DEPARTMENT OF JUSTICE August 24, 2017Documento435 páginasCOMPLAINT - THE STAN J. CATERBONE 42 U.S.C. 14141 "POLICE MISCONDUCT PROVISION" COMPLAINT TO U.S. DEPARTMENT OF JUSTICE August 24, 2017Stan J. CaterboneAinda não há avaliações
- Juegos PPCDocumento8 páginasJuegos PPCikro995Ainda não há avaliações
- Raspberry Pi Installing Noobs OSDocumento3 páginasRaspberry Pi Installing Noobs OSEXORCEAinda não há avaliações
- Media ReportDocumento46 páginasMedia ReportAndrew AB BurgoonAinda não há avaliações
- Hi Smith, Learn About US Sales Tax ExemptionDocumento2 páginasHi Smith, Learn About US Sales Tax Exemptionsmithmvuama5Ainda não há avaliações
- Filcar vs. EspinasDocumento2 páginasFilcar vs. EspinasBrian ThunderAinda não há avaliações
- Evaporator EfficiencyDocumento15 páginasEvaporator EfficiencySanjaySinghAdhikariAinda não há avaliações
- 4 3 3LeaseLinesignedDocumento42 páginas4 3 3LeaseLinesignedJagat Brahma PatraAinda não há avaliações
- Analisis Dan Perbandingan Jaringan Wifi Dengan Frekuensi 2.4 GHZ Dan 5 GHZ Dengan Metode QosDocumento19 páginasAnalisis Dan Perbandingan Jaringan Wifi Dengan Frekuensi 2.4 GHZ Dan 5 GHZ Dengan Metode QosNoltujuh Nollapan (Congyang)Ainda não há avaliações
- The 9 Best Reasons To Choose ZultysDocumento13 páginasThe 9 Best Reasons To Choose ZultysGreg EickeAinda não há avaliações
- FGD MetallurgyDocumento5 páginasFGD MetallurgyrajivashishAinda não há avaliações