Você também pode gostar
- Traction Control For BikeDocumento10 páginasTraction Control For BikeSachin KumarAinda não há avaliações
- Modeling and Control of A Single Motor Electronic Wedge BrakeDocumento11 páginasModeling and Control of A Single Motor Electronic Wedge BrakeHassan AAinda não há avaliações
- Active Body Control Suspension: Mahipati Dahiphale, Prof. F.U. PathanDocumento7 páginasActive Body Control Suspension: Mahipati Dahiphale, Prof. F.U. PathanTech DudeAinda não há avaliações
- Electrically Powered Hydraulic Steering System: New Generation ofDocumento3 páginasElectrically Powered Hydraulic Steering System: New Generation ofVrushabh SahareAinda não há avaliações
- Chapter3 Automotive Embedded ApplicationsDocumento156 páginasChapter3 Automotive Embedded ApplicationsKomal KalkutkarAinda não há avaliações
- Cummins Generating Set Assembly Torsional Vibration Analysis GuideDocumento10 páginasCummins Generating Set Assembly Torsional Vibration Analysis GuideariwibowoAinda não há avaliações
- E90 Driving Dynamics Systems PDFDocumento52 páginasE90 Driving Dynamics Systems PDFsattler14Ainda não há avaliações
- How A Torque Converter Works PDFDocumento8 páginasHow A Torque Converter Works PDFtsegay teklayeAinda não há avaliações
- Analysis of The Electric Wheel VibrationDocumento9 páginasAnalysis of The Electric Wheel VibrationSantiago Puma Puma AraujoAinda não há avaliações
- Sugahara Et Al 2009 Suppression of Vertical Bending and Rigid Body Mode Vibration in Railway Vehicle Car Body byDocumento15 páginasSugahara Et Al 2009 Suppression of Vertical Bending and Rigid Body Mode Vibration in Railway Vehicle Car Body byAnderAinda não há avaliações
- Electronically Controlled On-Demand 4WDDocumento32 páginasElectronically Controlled On-Demand 4WDjulio797Ainda não há avaliações
- Diesel Locomotive Manufacturing in IndiaDocumento30 páginasDiesel Locomotive Manufacturing in IndiaAjay KumarAinda não há avaliações
- Appunti Di Elaborazione MeccDocumento9 páginasAppunti Di Elaborazione MeccStefBeck BeckAinda não há avaliações
- Handbook of AC Servo SystemsDocumento42 páginasHandbook of AC Servo Systemskodandaram100% (1)
- Powertakeoffs GBDocumento23 páginasPowertakeoffs GBAvneet MaanAinda não há avaliações
- Anti Lock Brake System Tata Motors Information PDFDocumento16 páginasAnti Lock Brake System Tata Motors Information PDFValBMSAinda não há avaliações
- 4WD JMDocumento32 páginas4WD JMwreckedweasel100% (4)
- Dynamic BrakingDocumento6 páginasDynamic BrakingKumar shantanu BasakAinda não há avaliações
- Ignition ModuleDocumento4 páginasIgnition ModuleRoberto Sanchez Zapata100% (1)
- Fig. 1: Completed - The First Commercial ME EngineDocumento4 páginasFig. 1: Completed - The First Commercial ME EngineNouraAinda não há avaliações
- Optimization of Elastomeric Passive Engine Mount Using Direct Optimization MethodDocumento10 páginasOptimization of Elastomeric Passive Engine Mount Using Direct Optimization MethodTJPRC PublicationsAinda não há avaliações
- Cam Shaft Design and Analysis for Multi-Cylinder EngineDocumento52 páginasCam Shaft Design and Analysis for Multi-Cylinder EngineNationalinstituteDsnr67% (3)
- Programming The PowertrainDocumento10 páginasProgramming The PowertrainMiller Andres ArocaAinda não há avaliações
- Coordinated Control With ElectronicDocumento12 páginasCoordinated Control With Electronicakareem1755Ainda não há avaliações
- 273243957-DENSO-Common-Rail-Isuzu-6HK1-6SD1-Service-Manual-Pages Backup PDFDocumento9 páginas273243957-DENSO-Common-Rail-Isuzu-6HK1-6SD1-Service-Manual-Pages Backup PDFjwd100% (1)
- Next-generation AMT delivers smooth shifting and fuel efficiencyDocumento5 páginasNext-generation AMT delivers smooth shifting and fuel efficiencymihai_1957Ainda não há avaliações
- PDFDocumento16 páginasPDFAli TatarAinda não há avaliações
- Vocabulario KomatsuDocumento9 páginasVocabulario KomatsuFeri100% (1)
- 2001 01 0669Documento9 páginas2001 01 0669JuanDiegoAinda não há avaliações
- The Design of A Controller For The Steer-by-Wire System: Key WordsDocumento12 páginasThe Design of A Controller For The Steer-by-Wire System: Key WordsdashAinda não há avaliações
- Electronically Commutated Motors: Part 2: Constant-Airflow EcmsDocumento12 páginasElectronically Commutated Motors: Part 2: Constant-Airflow EcmsGayanAinda não há avaliações
- M05-Automotive Mechanical System FundamentalDocumento61 páginasM05-Automotive Mechanical System FundamentalMeseret Sisay50% (2)
- The 1.4L EA211 Gasoline Engine: Self Study Program 820333Documento62 páginasThe 1.4L EA211 Gasoline Engine: Self Study Program 820333royyap1008Ainda não há avaliações
- Cat 730 CejDocumento28 páginasCat 730 CejIvanAinda não há avaliações
- Subject (UNREG08) - Sensorless Motor ControlDocumento7 páginasSubject (UNREG08) - Sensorless Motor ControlsorrowarAinda não há avaliações
- AC Servo SystemsDocumento42 páginasAC Servo SystemsLe Hai Dang100% (1)
- SSP 266 28l Tdi Engine With Common Rail InjectionDocumento56 páginasSSP 266 28l Tdi Engine With Common Rail InjectionNhuong Hoang DinhAinda não há avaliações
- Torque StructureDocumento19 páginasTorque StructureAbhilash Patil100% (1)
- Electronic Carburettors (Automobile) PDFDocumento6 páginasElectronic Carburettors (Automobile) PDFManoj100% (3)
- Clutch Tuning To Optimize Noise and Vibration Behavior in Trucks and BusesDocumento11 páginasClutch Tuning To Optimize Noise and Vibration Behavior in Trucks and BusessmsnvhAinda não há avaliações
- Komatsu AcronymsDocumento7 páginasKomatsu Acronymsالمهندسوليدالطويل100% (4)
- 10 1504@ijvd 1986 061171Documento21 páginas10 1504@ijvd 1986 061171bhakticahdnmAinda não há avaliações
- Service Manual: Common Rail System For OPEL 4EE2 Type EngineDocumento32 páginasService Manual: Common Rail System For OPEL 4EE2 Type EngineTarık gündoğdu100% (2)
- Fan Trim BalanceDocumento44 páginasFan Trim BalanceSylvester Obara100% (1)
- Anti Lock Brake System (Tata Motors Information)Documento16 páginasAnti Lock Brake System (Tata Motors Information)Tapas Banerjee100% (3)
- Handbook of Ac Servo SystemsDocumento41 páginasHandbook of Ac Servo SystemsJoas Alvarez PizarroAinda não há avaliações
- SUJITNAYAKDocumento14 páginasSUJITNAYAKShahzad AlamAinda não há avaliações
- EPS Systems GuideDocumento7 páginasEPS Systems GuideEja Suteja100% (1)
- Active Engine MountsDocumento2 páginasActive Engine MountsJessica OwensAinda não há avaliações
- Slip Ratio Control of Anti-Lock Braking System With Bang-Bang ControllerDocumento8 páginasSlip Ratio Control of Anti-Lock Braking System With Bang-Bang Controllerniveditha trAinda não há avaliações
- Mechatronics Module 4: Sensors and ActuatorsDocumento23 páginasMechatronics Module 4: Sensors and ActuatorsCharles AbrahamAinda não há avaliações
- Configuring ACSM1 For Use With Servo Motors: Application NoteDocumento9 páginasConfiguring ACSM1 For Use With Servo Motors: Application NoteAsif JeeAinda não há avaliações
- PC210 (LC) - 10M0 Sen06701-C0 Circuit DiagramsDocumento40 páginasPC210 (LC) - 10M0 Sen06701-C0 Circuit DiagramsdatphuongAinda não há avaliações
- Brake Report 2015Documento38 páginasBrake Report 2015Pratyush NagareAinda não há avaliações
- Improve Your Knowledge of the Reliable 4A-FE EngineDocumento13 páginasImprove Your Knowledge of the Reliable 4A-FE EnginecjtrybiecAinda não há avaliações
- Study of Effect of Varying Engine Mount Locations and Stiffness On Vibration in Heavy Commercial Vehicles IJERTV3IS21173Documento4 páginasStudy of Effect of Varying Engine Mount Locations and Stiffness On Vibration in Heavy Commercial Vehicles IJERTV3IS21173UdhamAinda não há avaliações
- 2010-01-0310 - Advanced Development and Dynamometer Tuning of A Suzuki GSXR 600cc Engine For An FSAE® VehicleDocumento9 páginas2010-01-0310 - Advanced Development and Dynamometer Tuning of A Suzuki GSXR 600cc Engine For An FSAE® VehicleCaio PaimAinda não há avaliações
- Camiones Hitachi 2Documento7 páginasCamiones Hitachi 2Lineker Diaz100% (1)
- Thomson Electrac HD Linear Actuator Motion Control per CAN BusNo EverandThomson Electrac HD Linear Actuator Motion Control per CAN BusAinda não há avaliações
- 3031 DependabilityBBNmendel13formatA4submission PDFDocumento6 páginas3031 DependabilityBBNmendel13formatA4submission PDFSam JacobAinda não há avaliações
- 02 PPH 1010090 HMT - 14 PDFDocumento16 páginas02 PPH 1010090 HMT - 14 PDFSam JacobAinda não há avaliações
- Dynamic Evolving Neuro Fuzzy Systems of PDFDocumento10 páginasDynamic Evolving Neuro Fuzzy Systems of PDFSam JacobAinda não há avaliações
- 3031 DependabilityBBNmendel13formatA4submission PDFDocumento6 páginas3031 DependabilityBBNmendel13formatA4submission PDFSam JacobAinda não há avaliações
- Irjet V3i5453 PDFDocumento5 páginasIrjet V3i5453 PDFSam JacobAinda não há avaliações
- 02 PPH 1010090 HMT - 14 PDFDocumento16 páginas02 PPH 1010090 HMT - 14 PDFSam JacobAinda não há avaliações
- 2 Ijmperddec20182Documento12 páginas2 Ijmperddec20182TJPRC PublicationsAinda não há avaliações
- Braking System: A Technical Report On HydraulicDocumento20 páginasBraking System: A Technical Report On HydraulicSam JacobAinda não há avaliações
- Braking System: A Technical Report On HydraulicDocumento20 páginasBraking System: A Technical Report On HydraulicSam JacobAinda não há avaliações
- Braking System: A Technical Report On HydraulicDocumento20 páginasBraking System: A Technical Report On HydraulicSam JacobAinda não há avaliações
- Braking System: A Technical Report On HydraulicDocumento20 páginasBraking System: A Technical Report On HydraulicSam JacobAinda não há avaliações
- Electro HydraulicbrakeDocumento22 páginasElectro HydraulicbrakeSam JacobAinda não há avaliações
- Development of Variable Cooling System Aimed at Fuel Economy Improvement of Air-Cooled Engine For ScootersDocumento8 páginasDevelopment of Variable Cooling System Aimed at Fuel Economy Improvement of Air-Cooled Engine For ScootersSam JacobAinda não há avaliações
- Official Journal 01052009 Part II PDFDocumento255 páginasOfficial Journal 01052009 Part II PDFSam JacobAinda não há avaliações
- Brakes, Braje Control and Driver Assitance Systems PDFDocumento284 páginasBrakes, Braje Control and Driver Assitance Systems PDFAdaiir MoOntaño100% (6)
- Casappa - Hydraulic Gears PumpsDocumento72 páginasCasappa - Hydraulic Gears PumpsrenankeybAinda não há avaliações
- Compact Hydrostatic Steering UnitsDocumento6 páginasCompact Hydrostatic Steering UnitsSam JacobAinda não há avaliações
- Tips Introduction To The Design and Behavior of BoltedDocumento20 páginasTips Introduction To The Design and Behavior of BoltedSam JacobAinda não há avaliações
- Activa Scv110Documento230 páginasActiva Scv110Teddy KhantAinda não há avaliações
- Analysis of Capacity Fading For High-Power Lithium Ion Rechargeable BatteriesDocumento10 páginasAnalysis of Capacity Fading For High-Power Lithium Ion Rechargeable BatteriesSam JacobAinda não há avaliações
- Development of Chassis Performance Design Technologies For MBD of Mass-Production VehiclesDocumento11 páginasDevelopment of Chassis Performance Design Technologies For MBD of Mass-Production VehiclesSam JacobAinda não há avaliações
- Tips Introduction To The Design and Behavior of BoltedDocumento20 páginasTips Introduction To The Design and Behavior of BoltedSam JacobAinda não há avaliações
- Development of Variable Cooling System Aimed at Fuel Economy Improvement of Air-Cooled Engine For ScootersDocumento8 páginasDevelopment of Variable Cooling System Aimed at Fuel Economy Improvement of Air-Cooled Engine For ScootersSam JacobAinda não há avaliações
- E5 SteeringunitDocumento57 páginasE5 SteeringunitSam JacobAinda não há avaliações
- Development of Active Control Engine Mount System For Reduction of Resonance Vibration at Engine RestartDocumento6 páginasDevelopment of Active Control Engine Mount System For Reduction of Resonance Vibration at Engine RestartSam JacobAinda não há avaliações
- Seminar Report On ABSDocumento51 páginasSeminar Report On ABSSam JacobAinda não há avaliações
- Verification of High Altitude Performance and Characteristics For HF120 Turbofan EngineDocumento8 páginasVerification of High Altitude Performance and Characteristics For HF120 Turbofan EngineSam JacobAinda não há avaliações
- Anti Lock Braking System-FinelDocumento26 páginasAnti Lock Braking System-FinelkdsahooAinda não há avaliações
- Seminar Report On ABSDocumento20 páginasSeminar Report On ABSAkhilesh EaAinda não há avaliações
- Revised serpentine belt and pulley guideDocumento5 páginasRevised serpentine belt and pulley guidePedroni Jair PedroniAinda não há avaliações
- 1997 Buick LeSabre Service Repair ManualDocumento2.101 páginas1997 Buick LeSabre Service Repair ManualJoseph Riccardo67% (3)
- Engine Technology International - September 2014Documento108 páginasEngine Technology International - September 2014Guilherme PfeilstickerAinda não há avaliações
- Deutz 1015 Automotive Specs PDFDocumento2 páginasDeutz 1015 Automotive Specs PDFY.EbadiAinda não há avaliações
- Engine Builder Magazine Feb 2012Documento28 páginasEngine Builder Magazine Feb 2012Sawatchai Sroynark100% (1)
- Injection Completo 960 V22 Ingles PDFDocumento29 páginasInjection Completo 960 V22 Ingles PDFAnonymous CZbChofeA0% (1)
- A 10000 Automotive Special Tools FinalDocumento244 páginasA 10000 Automotive Special Tools FinalGuillermo Bohl50% (2)
- 10.13.11 The NickelDocumento16 páginas10.13.11 The Nickelliz6085Ainda não há avaliações
- Classified: Your Local MarketplaceDocumento3 páginasClassified: Your Local MarketplaceDigital MediaAinda não há avaliações
- Alfa Romeo Brera 2006 AUDocumento20 páginasAlfa Romeo Brera 2006 AUZoltán BálintAinda não há avaliações
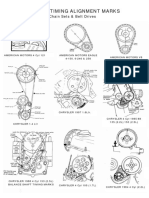
- Factory Timing Marks PDFDocumento6 páginasFactory Timing Marks PDFvadiAinda não há avaliações
- Lexus Timing BeltDocumento12 páginasLexus Timing Beltkellogg4905550% (2)
- In-Tank Fuel Pumps Catalog Cross Reference GuideDocumento52 páginasIn-Tank Fuel Pumps Catalog Cross Reference Guideleong keatAinda não há avaliações
- 1983 Data-Tech Chevrolet Carburador ROCHESTER E2ME EspecificacionesDocumento23 páginas1983 Data-Tech Chevrolet Carburador ROCHESTER E2ME EspecificacionesRubenAinda não há avaliações
- Train SLK r171 IntroDocumento98 páginasTrain SLK r171 IntroIvo AlmeidaAinda não há avaliações
- The Maserati of SUVs - Levante Performance and LuxuryDocumento6 páginasThe Maserati of SUVs - Levante Performance and LuxuryaleAinda não há avaliações
- Winter 2019Documento39 páginasWinter 2019Eric StovallAinda não há avaliações
- Hilux EbrochureDocumento24 páginasHilux Ebrochurenloukis236100% (1)
- Dokumen - Tips - 2012 Luk Repset Catalog Connolly Sales Clutch Job Can Take Up To 7 Hours of Labor PDFDocumento372 páginasDokumen - Tips - 2012 Luk Repset Catalog Connolly Sales Clutch Job Can Take Up To 7 Hours of Labor PDFPototoAinda não há avaliações
- K-Suite Truck and Bus Engine ListDocumento76 páginasK-Suite Truck and Bus Engine ListStephensonAinda não há avaliações
- Alfa Romeo Brera Misc Documents-Parts CatalogueDocumento119 páginasAlfa Romeo Brera Misc Documents-Parts CatalogueMusaHamzicAinda não há avaliações
- SP Tools CatalogoDocumento36 páginasSP Tools CatalogoKandy Kn100% (3)
- Maserati Levante 2018Documento28 páginasMaserati Levante 2018marcabaAinda não há avaliações
- Deutz TCD 2015Documento2 páginasDeutz TCD 2015Paul GuillaumeAinda não há avaliações
- Truck Body Mounting Directives 01-09-2006Documento362 páginasTruck Body Mounting Directives 01-09-2006George JabbourAinda não há avaliações
- Audi A4 Quattro 3.2 V6 4V Engine MechanicalDocumento905 páginasAudi A4 Quattro 3.2 V6 4V Engine MechanicalNP100% (3)
- Inline 6-Cylinder EnginesDocumento3 páginasInline 6-Cylinder EnginesfaizAinda não há avaliações
- LD23 Timing - Belt ProcedureDocumento4 páginasLD23 Timing - Belt ProcedureNaomi Marty100% (1)
- Everything You Need to Know About Engine ConfigurationsDocumento25 páginasEverything You Need to Know About Engine ConfigurationsPrajwal JaiswalAinda não há avaliações