Você também pode gostar
- TC1 1 Paguay Quilumbaquin PDFDocumento3 páginasTC1 1 Paguay Quilumbaquin PDFEdgar PaguayAinda não há avaliações
- Completo Laplace MATLAB Modelados SIMULINK PDFDocumento94 páginasCompleto Laplace MATLAB Modelados SIMULINK PDFAramis RamirezAinda não há avaliações
- Laboratorio 1 ResueltoDocumento7 páginasLaboratorio 1 ResueltoArmando FreireAinda não há avaliações
- Modelamiento y Simulacion Mediante SimulinkDocumento8 páginasModelamiento y Simulacion Mediante SimulinkwilliamAinda não há avaliações
- Analisis Dinamico de Sistemas Con MatlabDocumento4 páginasAnalisis Dinamico de Sistemas Con Matlabsteeven armasAinda não há avaliações
- Informe 2Documento4 páginasInforme 2Eddy MorilloAinda não há avaliações
- Reporte Ronald Carbo 6960 PDFDocumento3 páginasReporte Ronald Carbo 6960 PDFRonald VidalAinda não há avaliações
- C.E MecanismosDocumento31 páginasC.E Mecanismos205 Gomez Dguez Jeraldy SinaiAinda não há avaliações
- Laboratorio 07 Modelamiento Con El SimulinkDocumento14 páginasLaboratorio 07 Modelamiento Con El SimulinkMILAGROS ALEJANDRA0% (1)
- Diseño Y Construcción de Un Pendulo Invertido Y Sus ControladoresDocumento8 páginasDiseño Y Construcción de Un Pendulo Invertido Y Sus ControladoresMario CasasAinda não há avaliações
- Info 1Documento3 páginasInfo 1LuisAlbertoAinda não há avaliações
- Informe 2 Yanez ReyesDocumento3 páginasInforme 2 Yanez Reyesmario yanezAinda não há avaliações
- Informe 2Documento6 páginasInforme 2Andres Alexi Arreaga BetancourtAinda não há avaliações
- AnteproyectoDocumento8 páginasAnteproyectoANDRES STEVEN MORALES RODRIGUEZAinda não há avaliações
- Trabajo Final (Pendulo de Furuta) - Control Automatico IIDocumento21 páginasTrabajo Final (Pendulo de Furuta) - Control Automatico IIAnthonny Monrroy RodriguezAinda não há avaliações
- Guia 2 Sget Yunga, Monroy InformeDocumento9 páginasGuia 2 Sget Yunga, Monroy InformeKlever QuichimboAinda não há avaliações
- Reporte Práctica 1Documento10 páginasReporte Práctica 1Erick Uriel Sánchez CastilloAinda não há avaliações
- 3 - MI3FS - Dinámica Notación Matricial - Rev1Documento1 página3 - MI3FS - Dinámica Notación Matricial - Rev1Euge GalardiAinda não há avaliações
- PracticaDocumento7 páginasPracticaLeonardoAinda não há avaliações
- Practica 8 Valentina y CarlosDocumento10 páginasPractica 8 Valentina y CarlosValentina SilvaAinda não há avaliações
- 1 PDFDocumento8 páginas1 PDFMario CasasAinda não há avaliações
- Sistema de Control Masa - Resorte y Funcion de TransferenciaDocumento5 páginasSistema de Control Masa - Resorte y Funcion de TransferenciaMiguel VivarAinda não há avaliações
- GP13 - Modelado de Sistemas Con Simulink-SimscapeDocumento8 páginasGP13 - Modelado de Sistemas Con Simulink-Simscapecolapse teiwinAinda não há avaliações
- Informe Practica2 Teoria de Control IIIDocumento5 páginasInforme Practica2 Teoria de Control IIIalex carvajalAinda não há avaliações
- Co st134 06Documento10 páginasCo st134 06EsmfAinda não há avaliações
- Sistema de Control On Off Bi-HeliceDocumento5 páginasSistema de Control On Off Bi-HeliceRAUL DAVID QUINTERO GALVANAinda não há avaliações
- Laboratorio2 Control2Documento23 páginasLaboratorio2 Control20632021011Ainda não há avaliações
- Circuitos Electricos - SimulinkDocumento13 páginasCircuitos Electricos - SimulinkMayra Pacahuala AguirreAinda não há avaliações
- Pendulo InvertidoDocumento131 páginasPendulo InvertidoMILTON CABRERAAinda não há avaliações
- Estabilizacindeunpnduloinvertidousando MPCy LQRDocumento8 páginasEstabilizacindeunpnduloinvertidousando MPCy LQRAle RQAinda não há avaliações
- Reporte 8 Ing Control Eq 3Documento4 páginasReporte 8 Ing Control Eq 3AlexisCantuAinda não há avaliações
- Informe3Quishpe LuisDocumento4 páginasInforme3Quishpe LuisFercho QrAinda não há avaliações
- Informe 1 Automatización IndustrialDocumento3 páginasInforme 1 Automatización IndustrialSergio David Moya HilariónAinda não há avaliações
- Control de Un Helicoptero Con Dos Grados de Libertad Por Medio de Un Controlador Difuso y Un Controlador Por Realimentacion de EstadosDocumento2 páginasControl de Un Helicoptero Con Dos Grados de Libertad Por Medio de Un Controlador Difuso y Un Controlador Por Realimentacion de EstadosA-SanThiago Rojas Llerena100% (1)
- SCO101 - G0 - Sistemas de Control Automatico Con Simulink C1 - 2022 BIS2Documento9 páginasSCO101 - G0 - Sistemas de Control Automatico Con Simulink C1 - 2022 BIS2noelAinda não há avaliações
- Informe Final 2 de Sistema de Control 1Documento6 páginasInforme Final 2 de Sistema de Control 1walterAinda não há avaliações
- Laboratorio de Sistemas de Control SCILABDocumento27 páginasLaboratorio de Sistemas de Control SCILABLuisCarlosRemonCotesAinda não há avaliações
- Informe ADocumento9 páginasInforme AJose PintoAinda não há avaliações
- CONTROL DE UN SISTEMA DE BARRA Y BOLA Mediante Variables de Estado PDFDocumento22 páginasCONTROL DE UN SISTEMA DE BARRA Y BOLA Mediante Variables de Estado PDFLubrication´s RoomAinda não há avaliações
- Lab 01Documento28 páginasLab 01Antony MarinAinda não há avaliações
- SimulinkDocumento10 páginasSimulinkEmmanuel MolinaAinda não há avaliações
- Informe Avance 1Documento9 páginasInforme Avance 1ANDRES STEVEN MORALES RODRIGUEZAinda não há avaliações
- Practica 2 QuichimboDocumento7 páginasPractica 2 QuichimboKlever QuichimboAinda não há avaliações
- Reporte Practica 2Documento6 páginasReporte Practica 2Alejandro MuroAinda não há avaliações
- Informe Controlador Neural Adaptativo Con Modelo de ReferenciaDocumento11 páginasInforme Controlador Neural Adaptativo Con Modelo de ReferenciaJose FuentesAinda não há avaliações
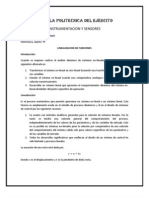
- LinealizacionDocumento4 páginasLinealizacionJorge Zambrano IbujésAinda não há avaliações
- Reporte RLC MatlabDocumento4 páginasReporte RLC MatlabJose Robles HAinda não há avaliações
- Control Robot ScaraDocumento10 páginasControl Robot ScaraAxel Luis Reategui LobatoAinda não há avaliações
- Morfologia de Los Robots Manipuladores CAD/CAMDocumento15 páginasMorfologia de Los Robots Manipuladores CAD/CAMCM35Ainda não há avaliações
- Sistemas de Control IIIDocumento12 páginasSistemas de Control IIIScottie RamseyAinda não há avaliações
- Etapa 3 - Grupo 17 - Edinson NuñezDocumento25 páginasEtapa 3 - Grupo 17 - Edinson Nuñezedinson nunez100% (1)
- Silabo Sistemas de Control - 2021 - BDocumento8 páginasSilabo Sistemas de Control - 2021 - BsebastianAinda não há avaliações
- PR 3Documento6 páginasPR 3Luis Kev Pacheco AlvaradoAinda não há avaliações
- Laboratorio1 Diagrama Bloques Simulink V2 (Realizado1) 2Documento14 páginasLaboratorio1 Diagrama Bloques Simulink V2 (Realizado1) 2Andres UchoAinda não há avaliações
- Laboratorio1 Diagrama Bloques Simulink V2Documento8 páginasLaboratorio1 Diagrama Bloques Simulink V2AndresChangoluisaAinda não há avaliações
- Curso moderno de máquinas eléctricas rotativas. Tomo IV: Máquinas síncronas y motores c.a. de colectorNo EverandCurso moderno de máquinas eléctricas rotativas. Tomo IV: Máquinas síncronas y motores c.a. de colectorAinda não há avaliações
- Modelado y simulación de redes. Aplicación de QoS con opnet modelerNo EverandModelado y simulación de redes. Aplicación de QoS con opnet modelerAinda não há avaliações
- Control de movimiento en manufactura. Automatización CNC fundamentos de diseño y modelamiento experimentalNo EverandControl de movimiento en manufactura. Automatización CNC fundamentos de diseño y modelamiento experimentalNota: 5 de 5 estrelas5/5 (4)
- Enfoque práctico de control moderno: Con aplicaciones en MatlabNo EverandEnfoque práctico de control moderno: Con aplicaciones en MatlabNota: 5 de 5 estrelas5/5 (1)
- LECTURA 2 Progreso Reciente Y Diseño de Cable de Alimentación Coaxial HTS Trifásico en CoreaDocumento3 páginasLECTURA 2 Progreso Reciente Y Diseño de Cable de Alimentación Coaxial HTS Trifásico en CoreaMao MrcAinda não há avaliações
- 2 Características de Redes EscalablesDocumento25 páginas2 Características de Redes EscalablesMao MrcAinda não há avaliações
- 4 Conexiones Punto A PuntoDocumento16 páginas4 Conexiones Punto A PuntoMao MrcAinda não há avaliações
- 1 Intro WANDocumento23 páginas1 Intro WANMao MrcAinda não há avaliações
- Examen Práctico Interciclo Electiva PDFDocumento10 páginasExamen Práctico Interciclo Electiva PDFMao Mrc100% (1)
- Electiva-II IDS, IPS, NIDS (Miguel Cóndor-Paul Caiza)Documento10 páginasElectiva-II IDS, IPS, NIDS (Miguel Cóndor-Paul Caiza)Mao MrcAinda não há avaliações
- Pca 1bgu Filosofia 2018 PatriciaDocumento9 páginasPca 1bgu Filosofia 2018 PatriciaHumoisa MoralesAinda não há avaliações
- Integral DefinidaDocumento26 páginasIntegral DefinidaLuis Leodan Vera AlvaAinda não há avaliações
- Taller Probabilidades y Funciones.Documento3 páginasTaller Probabilidades y Funciones.Ehiber Barbosa PáezAinda não há avaliações
- B.1.3. Probabilidad Axiomática y CondicionalDocumento111 páginasB.1.3. Probabilidad Axiomática y CondicionalAnthony PrestonAinda não há avaliações
- 05 - Ejemplo Formato IFACDocumento6 páginas05 - Ejemplo Formato IFAClalita2604Ainda não há avaliações
- TEMA 8. Prueba de HipótesisDocumento53 páginasTEMA 8. Prueba de HipótesisBrayan GamboaAinda não há avaliações
- Ejercicios de Integracion Multiple Con RespuestasDocumento3 páginasEjercicios de Integracion Multiple Con RespuestasAlejandro Miguel Zegarra YufraAinda não há avaliações
- Cuaderno Virtual 3Documento99 páginasCuaderno Virtual 3Ivan0% (1)
- Acfrogcn Fqydgkpbjm2f 3ygzep I9jnrr6xtz51jcf4no Iqtfrcwlgt Pg86emwbhjwr0haevndllz455fhkdtfr5x8 Qlscrxbcqqpgwza Xihom163asfckphnp5qv2c5yt8zaxubvs3sf3Documento4 páginasAcfrogcn Fqydgkpbjm2f 3ygzep I9jnrr6xtz51jcf4no Iqtfrcwlgt Pg86emwbhjwr0haevndllz455fhkdtfr5x8 Qlscrxbcqqpgwza Xihom163asfckphnp5qv2c5yt8zaxubvs3sf3Belen CastilloAinda não há avaliações
- Tabla Quiz 2. Simulación GerencialDocumento3 páginasTabla Quiz 2. Simulación GerencialNathaliaVillegas100% (2)
- U2A2 MartinezB GabrielaB MAFIDocumento8 páginasU2A2 MartinezB GabrielaB MAFIGabriela Berenice MartinezAinda não há avaliações
- RarefaccionDocumento7 páginasRarefaccionVictor PascuAinda não há avaliações
- Fisica Aplicada 1Documento6 páginasFisica Aplicada 1rodrigo mamani apazaAinda não há avaliações
- Ejercicio Sobre Árboles AVLDocumento4 páginasEjercicio Sobre Árboles AVLLuis Cabrera CrotAinda não há avaliações
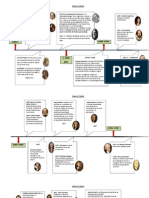
- Línea de Tiempo de Fisicos Destacados Mejorada-FinalDocumento5 páginasLínea de Tiempo de Fisicos Destacados Mejorada-FinalNadia Marinka Igor Villanueva100% (6)
- CC - Division Polinomios, Factorizacion, Fracciones AlgebraicasDocumento19 páginasCC - Division Polinomios, Factorizacion, Fracciones AlgebraicasJuanito peñaAinda não há avaliações
- Enriquez - El Docente - InvestigadorDocumento26 páginasEnriquez - El Docente - InvestigadorNorma PappaletteraAinda não há avaliações
- Correccion de Curvas de Bombas Por Leyes de AfinidadDocumento34 páginasCorreccion de Curvas de Bombas Por Leyes de Afinidadantonio gutierrezAinda não há avaliações
- Fase 1Documento4 páginasFase 1Paola TabaresAinda não há avaliações
- 003-Expresiones Algebraicas Racionales e IrracionalesDocumento6 páginas003-Expresiones Algebraicas Racionales e IrracionalesAnalia NuñezAinda não há avaliações
- Tramporte de MasasDocumento35 páginasTramporte de MasasANDREA FLORES TULUMBAAinda não há avaliações
- Presentación Bases Curriculares 7° Básico A 2° Medio - MatemáticaDocumento20 páginasPresentación Bases Curriculares 7° Básico A 2° Medio - MatemáticaAlberto HurtadoAinda não há avaliações
- Ensayo de TorsionDocumento8 páginasEnsayo de TorsionJorgeyVanessa Rodriguez MejiaAinda não há avaliações
- Geometría 02 PSDocumento4 páginasGeometría 02 PSNatalia Vila ZuñigaAinda não há avaliações
- Relación Entre La Distribución Binomial y NormalDocumento25 páginasRelación Entre La Distribución Binomial y NormalLore Abad Crespo0% (2)
- Ejercicios VectoresDocumento2 páginasEjercicios VectoresGuillermo TellAinda não há avaliações
- Taller de Operaciones Entre MatricesDocumento7 páginasTaller de Operaciones Entre MatricesBrandacaAinda não há avaliações
- Contenido Matemática BásicaDocumento8 páginasContenido Matemática Básicamayra amayaAinda não há avaliações
- Aprendo Probabilidades - 5°Documento16 páginasAprendo Probabilidades - 5°justofloresAinda não há avaliações