Você também pode gostar
- Software EngineeringDocumento40 páginasSoftware EngineeringRanu GamesAinda não há avaliações
- E0805034043Documento5 páginasE0805034043Ranu GamesAinda não há avaliações
- DISCRIPTIONDocumento8 páginasDISCRIPTIONRanu GamesAinda não há avaliações
- Cover Page PDFDocumento1 páginaCover Page PDFRanu GamesAinda não há avaliações
- Portable Electrical Ladder: XXX-X-XXXX-XXXX-X/XX/$XX.00 ©20XX IEEEDocumento5 páginasPortable Electrical Ladder: XXX-X-XXXX-XXXX-X/XX/$XX.00 ©20XX IEEERanu GamesAinda não há avaliações
- Format of The BalancesheetDocumento2 páginasFormat of The BalancesheetRanu Games100% (1)
- Friction of Pipe 2Documento5 páginasFriction of Pipe 2Ranu GamesAinda não há avaliações
- What Is Permeable Concrete?: Design of The SampleDocumento1 páginaWhat Is Permeable Concrete?: Design of The SampleRanu GamesAinda não há avaliações
- Friction of Pipe 2Documento5 páginasFriction of Pipe 2Ranu GamesAinda não há avaliações
- 1Documento7 páginas1Ranu GamesAinda não há avaliações
- 1Documento7 páginas1Ranu GamesAinda não há avaliações
- Impacts of Extreme Events On Transmission and Distribution SystemsDocumento10 páginasImpacts of Extreme Events On Transmission and Distribution SystemsRanu GamesAinda não há avaliações
- Discussion: Spur Gear & Helical Gears: Cutaway ModelDocumento6 páginasDiscussion: Spur Gear & Helical Gears: Cutaway ModelRanu GamesAinda não há avaliações
- Double Entry System, The Ledger and The Trial BalanceDocumento37 páginasDouble Entry System, The Ledger and The Trial BalanceRanu GamesAinda não há avaliações
- Ortho1 PDFDocumento2 páginasOrtho1 PDFadnanraisahmedAinda não há avaliações
- Ortho1 PDFDocumento2 páginasOrtho1 PDFadnanraisahmedAinda não há avaliações
- DLTC Announcement 2017-NewDocumento4 páginasDLTC Announcement 2017-NewRanu GamesAinda não há avaliações
- Power Cycles 2019Documento29 páginasPower Cycles 2019Ranu Games100% (1)
- Ship MovementsDocumento1 páginaShip MovementsRanu GamesAinda não há avaliações
- Flywheel or Inertia Wheel Used in A MachineDocumento3 páginasFlywheel or Inertia Wheel Used in A MachineRanu GamesAinda não há avaliações
- Introduction To Fluid Mechanics - 2005Documento27 páginasIntroduction To Fluid Mechanics - 2005Ranu GamesAinda não há avaliações
- Fluid Statics: Figure 3.1 (P. 31)Documento10 páginasFluid Statics: Figure 3.1 (P. 31)Omil RastogiAinda não há avaliações
- Viscosity vs. Temperature For Common FluidsDocumento1 páginaViscosity vs. Temperature For Common FluidsRanu GamesAinda não há avaliações
- B12e Fluid Mechanics Fluid Mechanics Fluid MechanicsDocumento2 páginasB12e Fluid Mechanics Fluid Mechanics Fluid MechanicsKushanAinda não há avaliações
- Theoretical Determination of Metacentric Height of A Floating BodyDocumento2 páginasTheoretical Determination of Metacentric Height of A Floating BodyRanu GamesAinda não há avaliações
- Ch3 Fluid Statics (Part B)Documento68 páginasCh3 Fluid Statics (Part B)lofeagaiAinda não há avaliações
- CE 1022 Buoyancy and Relative Equilibrium - Lecture NoteDocumento36 páginasCE 1022 Buoyancy and Relative Equilibrium - Lecture NoteRanu GamesAinda não há avaliações
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (119)
- Rotary TransformerDocumento5 páginasRotary TransformerAndrea GarciaAinda não há avaliações
- Trafo Loss CalDocumento3 páginasTrafo Loss Calashish sahaAinda não há avaliações
- Physics Transformer Invistigatory Project On TransformersDocumento34 páginasPhysics Transformer Invistigatory Project On TransformersMadhav Dacha50% (2)
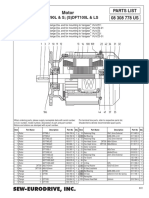
- Return To Index Parts List MotorDocumento1 páginaReturn To Index Parts List Motorcmaradiaga0% (1)
- DFCCIL Executive Electrical 2018 English (English)Documento25 páginasDFCCIL Executive Electrical 2018 English (English)Shyamala karnaAinda não há avaliações
- Modelado Matemático de Un Servomotor TrifásicoDocumento15 páginasModelado Matemático de Un Servomotor TrifásicoSebastian LunaAinda não há avaliações
- Hybrid Controller: 3-Phase BLDC Motor Control With Hall Sensors Using 56F805Documento70 páginasHybrid Controller: 3-Phase BLDC Motor Control With Hall Sensors Using 56F805Truong Quang Minh PH 1 8 9 0 4Ainda não há avaliações
- Grundfos Motor Book ENDocumento250 páginasGrundfos Motor Book ENdanmarAinda não há avaliações
- Assignment 2 SolutionDocumento5 páginasAssignment 2 SolutionAhmedH ElashryAinda não há avaliações
- IEE Tema3 MaquinasElectricas - TraducidoDocumento26 páginasIEE Tema3 MaquinasElectricas - TraducidoEda TimAinda não há avaliações
- Armature WindingDocumento27 páginasArmature Windingbitconcepts9781Ainda não há avaliações
- Mechanical and Electrical Actuation Systems - UNIT II SECOND HALFDocumento87 páginasMechanical and Electrical Actuation Systems - UNIT II SECOND HALFKuppan Chetty RamanathanAinda não há avaliações
- MIL-HDBK-225A Synchros Description and OperationDocumento236 páginasMIL-HDBK-225A Synchros Description and OperationBob MatreciAinda não há avaliações
- EE103 Lecture11 BGF 09 Dec 2022 Mod1 JJC 1Documento16 páginasEE103 Lecture11 BGF 09 Dec 2022 Mod1 JJC 1Raunak MukherjeeAinda não há avaliações
- Coil Winding Technology - WikipediaDocumento25 páginasCoil Winding Technology - WikipediaHyan GontijoAinda não há avaliações
- MagneticsDocumento48 páginasMagneticsDaniel Palomares GAinda não há avaliações
- Exercise On DC MachineDocumento4 páginasExercise On DC MachineHanan ShayiboAinda não há avaliações
- Electrical Machinary Lab 3Documento4 páginasElectrical Machinary Lab 3Nazreen KamaruddinAinda não há avaliações
- Iempe 2015 Spring EndDocumento2 páginasIempe 2015 Spring EndMeesha VyasAinda não há avaliações
- Electrical Machines I Assignment 2Documento2 páginasElectrical Machines I Assignment 2Aina MwadhinaAinda não há avaliações
- Chapter 2Documento24 páginasChapter 2Ahmed YaseenAinda não há avaliações
- MCQ in AC Electrical MachinesDocumento27 páginasMCQ in AC Electrical MachinesMohammed Dyhia Ali83% (12)
- SYNCHRONOUS GENERATOR CONSTRUCTIONDocumento52 páginasSYNCHRONOUS GENERATOR CONSTRUCTIONMuhammad Sulthon Novera RegaAinda não há avaliações
- Induction Motor Construction and OperationDocumento23 páginasInduction Motor Construction and OperationDaniyar SeytenovAinda não há avaliações
- Transformers_objectives_examDocumento11 páginasTransformers_objectives_examRaj Kumar PatelAinda não há avaliações
- Electrical Engineering MCQDocumento20 páginasElectrical Engineering MCQmohit138100% (1)
- Question Paper CodeDocumento2 páginasQuestion Paper CodeRK SAinda não há avaliações
- 2017 Winter Model Answer Paper PDFDocumento29 páginas2017 Winter Model Answer Paper PDFshivani valivAinda não há avaliações
- Systems of Alternate Current Motors and Transformers / TeslaDocumento20 páginasSystems of Alternate Current Motors and Transformers / Teslaalexis.testrfAinda não há avaliações
- Transformer Substation PК RMU 10 (20) /0.4 kV up to 800 kVA Single Line DiagramDocumento12 páginasTransformer Substation PК RMU 10 (20) /0.4 kV up to 800 kVA Single Line DiagramVinod ViparAinda não há avaliações