Você também pode gostar
- Design and Simulation of Communication Architecture For Differential Protection in IEC 61850 Based SubstationsDocumento5 páginasDesign and Simulation of Communication Architecture For Differential Protection in IEC 61850 Based SubstationsThiago Borges AndreAinda não há avaliações
- 9460-Article Text PDF-25260-2-10-20170215Documento12 páginas9460-Article Text PDF-25260-2-10-20170215cvkcvkAinda não há avaliações
- False Data Injection Attacks Against Synchronization Systems in MicrogridsDocumento13 páginasFalse Data Injection Attacks Against Synchronization Systems in MicrogridssaraAinda não há avaliações
- Denial of Service Attack On Tie-Line Bias Control in A Power System With PV PlantDocumento16 páginasDenial of Service Attack On Tie-Line Bias Control in A Power System With PV PlantTohid BehdadniaAinda não há avaliações
- Resilient Consensus-Based AC Optimal Power Flow Against Data Integrity Attacks Using PLCDocumento12 páginasResilient Consensus-Based AC Optimal Power Flow Against Data Integrity Attacks Using PLCsaraAinda não há avaliações
- Utility Implements Communications Assisted Special Protection and Control Schemes For Distribution Substations 1Documento11 páginasUtility Implements Communications Assisted Special Protection and Control Schemes For Distribution Substations 1Mike VillarinoAinda não há avaliações
- Deep Learning-Based Model Predictive Control For Resonant Power ConvertersDocumento9 páginasDeep Learning-Based Model Predictive Control For Resonant Power ConvertersSupriya DiwanAinda não há avaliações
- Intelligent Three Tie Contactor Switch Unit-Based Fault Detection and Isolation in DC MicrogridsDocumento11 páginasIntelligent Three Tie Contactor Switch Unit-Based Fault Detection and Isolation in DC MicrogridsKarthikkeyan SAinda não há avaliações
- Wide-Area Damping Controller For Power System Interarea Oscillations A Networked Predictive Control ApproachDocumento10 páginasWide-Area Damping Controller For Power System Interarea Oscillations A Networked Predictive Control ApproachRAJESH KUMARAinda não há avaliações
- R22 - D-STATCOM For Power Quality ImprovementDocumento6 páginasR22 - D-STATCOM For Power Quality ImprovementAli Al-QattanAinda não há avaliações
- Intelligent Fault Analysis in Electrical Power Grids: 2017 International Conference On Tools With Artificial IntelligenceDocumento6 páginasIntelligent Fault Analysis in Electrical Power Grids: 2017 International Conference On Tools With Artificial IntelligenceSunil PradhanAinda não há avaliações
- A Novel Cyberattack-Resilient Frequency Control Method For Interconnected Power Systems Using SMO-based Attack EstimationDocumento13 páginasA Novel Cyberattack-Resilient Frequency Control Method For Interconnected Power Systems Using SMO-based Attack EstimationGafry MahmoudAinda não há avaliações
- IET Power Electronics - 2021 - Saadat - Adaptive Neuro Fuzzy Inference Systems ANFIS Controller Design On Single PhaseDocumento14 páginasIET Power Electronics - 2021 - Saadat - Adaptive Neuro Fuzzy Inference Systems ANFIS Controller Design On Single PhaseMahdi HERMASSIAinda não há avaliações
- Energy-Efficient Surveillance System Using Wireless Sensor NetworksDocumento14 páginasEnergy-Efficient Surveillance System Using Wireless Sensor NetworksEdwardAinda não há avaliações
- Constructing Online Testable CircuitsDocumento9 páginasConstructing Online Testable CircuitsNandita RajasekaranAinda não há avaliações
- Happy New Year: October - December 2004Documento4 páginasHappy New Year: October - December 2004kra_amAinda não há avaliações
- 1 s2.0 S0142061523003368 MainDocumento9 páginas1 s2.0 S0142061523003368 Maintonmoy hossainAinda não há avaliações
- Plug-and-Play Compliant Control For Inverter-Based MicrogridsDocumento13 páginasPlug-and-Play Compliant Control For Inverter-Based MicrogridsTRIAD TECHNO SERVICESAinda não há avaliações
- Nuclear Engineering and Technology: Moon-Gi Min, Jae-Ki Lee, Kwang-Hyun Lee, Dongil Lee, Hee-Taek LimDocumento7 páginasNuclear Engineering and Technology: Moon-Gi Min, Jae-Ki Lee, Kwang-Hyun Lee, Dongil Lee, Hee-Taek LimfreewareAinda não há avaliações
- Comparative Analysis of 100M Switched Ethernet and CAN-FD Networks in Feedback Loop Networked Control SystemDocumento7 páginasComparative Analysis of 100M Switched Ethernet and CAN-FD Networks in Feedback Loop Networked Control SystemAkpeghagha OghenevwaireAinda não há avaliações
- Improving The Uplink Capacityof A Long Term Evolution Network Using Power Control TechniqueDocumento6 páginasImproving The Uplink Capacityof A Long Term Evolution Network Using Power Control TechniqueGregAinda não há avaliações
- Zhaoxia 2017Documento6 páginasZhaoxia 2017Maxime BatongaAinda não há avaliações
- Active Distribution NetworksDocumento6 páginasActive Distribution Networksgowthamnm.nieAinda não há avaliações
- Fully Distributed Cooperative Secondary Frequency and Voltage Control of Islanded MicrogridsDocumento11 páginasFully Distributed Cooperative Secondary Frequency and Voltage Control of Islanded MicrogridsSwagath Kumar PandaAinda não há avaliações
- A Review Approach of Power Grid Analysis in Vlsi Designs: August 2013Documento7 páginasA Review Approach of Power Grid Analysis in Vlsi Designs: August 2013ThiruAinda não há avaliações
- Different Types of UPS SystemsDocumento43 páginasDifferent Types of UPS SystemsPanner2009Ainda não há avaliações
- Stability Analysis of Networked Control in Smart GridsDocumento10 páginasStability Analysis of Networked Control in Smart GridsVinh NguyenAinda não há avaliações
- Wireless NetworksDocumento6 páginasWireless NetworksailamrudhulaAinda não há avaliações
- Microgrid and Decentralization of Electrical GridDocumento5 páginasMicrogrid and Decentralization of Electrical Gridgowthamnm.nieAinda não há avaliações
- Energy-Efficient Surveillance System Using Wireless Sensor NetworksDocumento14 páginasEnergy-Efficient Surveillance System Using Wireless Sensor NetworksAbel BhuAinda não há avaliações
- Analysis of A Multifunctional Inverter Active-Filtering Function Influence On The Small-Signal Stability of Inverter-Based Islanded AC MicrogridsDocumento10 páginasAnalysis of A Multifunctional Inverter Active-Filtering Function Influence On The Small-Signal Stability of Inverter-Based Islanded AC Microgridsnaga_rajAinda não há avaliações
- Stability Analysis and Controller Design of DC Microgrids With Constant Power LoadDocumento8 páginasStability Analysis and Controller Design of DC Microgrids With Constant Power Loadpavan gangwarAinda não há avaliações
- Analysis of Voltage Stability of Electrical Power Network and Its Improvement Using Distributed GenerationDocumento1 páginaAnalysis of Voltage Stability of Electrical Power Network and Its Improvement Using Distributed GenerationKabir ChakrabortyAinda não há avaliações
- Authentication and Integrity in The Smart Grid AnDocumento14 páginasAuthentication and Integrity in The Smart Grid AnjitendraAinda não há avaliações
- Deep Learning Defined Power Electronic ConvertersDocumento8 páginasDeep Learning Defined Power Electronic Convertersskrishna261Ainda não há avaliações
- Decentralized Feedback Control For Wireless Sensor and ActuatorDocumento13 páginasDecentralized Feedback Control For Wireless Sensor and ActuatorJorge LoyolaAinda não há avaliações
- rpg2 12088Documento12 páginasrpg2 12088Akhilesh Kumar MishraAinda não há avaliações
- IET Renewable Power Gen - 2024 - Sharma - A Low Voltage Microgrid Protection Scheme Using Digital Instrument TransformersDocumento12 páginasIET Renewable Power Gen - 2024 - Sharma - A Low Voltage Microgrid Protection Scheme Using Digital Instrument Transformerskhitech2002Ainda não há avaliações
- Hohlt 2004Documento10 páginasHohlt 2004Eko PrayitnoAinda não há avaliações
- SCL Config Microgrid FinalDocumento8 páginasSCL Config Microgrid FinalCosmin TomaAinda não há avaliações
- P1 - Survivability and Performance Optimization of Mobile Wireless Communication Networks in The Event of Base Station FailureDocumento15 páginasP1 - Survivability and Performance Optimization of Mobile Wireless Communication Networks in The Event of Base Station Failurezaman9206Ainda não há avaliações
- A Cosine Similarity Based Centralized Protection Scheme For DC MicrogridsDocumento11 páginasA Cosine Similarity Based Centralized Protection Scheme For DC Microgridsnikhil sharmaAinda não há avaliações
- Absolute Energy Routing and Real-Time Power Monitoring For Grid-Connected Distribution NetworksDocumento9 páginasAbsolute Energy Routing and Real-Time Power Monitoring For Grid-Connected Distribution NetworksDharshiniVenugopalAinda não há avaliações
- 1 s2.0 S0142061522005956 MainDocumento13 páginas1 s2.0 S0142061522005956 MainBhargavi KmAinda não há avaliações
- Case Study: IEC 61850 Application For A Transmission Substation in GhanaDocumento10 páginasCase Study: IEC 61850 Application For A Transmission Substation in Ghanacarlos valecillosAinda não há avaliações
- Distribution Management Systems For Smart Grid Architecture Work Flows and InteroperabilityDocumento9 páginasDistribution Management Systems For Smart Grid Architecture Work Flows and InteroperabilitySimo MilenkovićAinda não há avaliações
- Stability Enhancement of Decentralized Inverter Control Through Wireless Communications in MicrogridsDocumento11 páginasStability Enhancement of Decentralized Inverter Control Through Wireless Communications in MicrogridsARUNIMA SAinda não há avaliações
- A Neural Network Based Optimal Wide Area Control Scheme For A Power SystemDocumento7 páginasA Neural Network Based Optimal Wide Area Control Scheme For A Power Systemapi-3697505Ainda não há avaliações
- Power Saving Network Protocol System Using Hyper Quorum SystemDocumento4 páginasPower Saving Network Protocol System Using Hyper Quorum SystemerpublicationAinda não há avaliações
- Modeling and Anylysis of Power Line Communications for Application in Smart Grid - КондрашовDocumento6 páginasModeling and Anylysis of Power Line Communications for Application in Smart Grid - КондрашовlarisszaAinda não há avaliações
- Levitador IEEEDocumento6 páginasLevitador IEEEOscar Lob GioAinda não há avaliações
- Ijesat 2012 02 Si 01 07Documento4 páginasIjesat 2012 02 Si 01 07Ijesat JournalAinda não há avaliações
- Energies 14 02376 v2Documento43 páginasEnergies 14 02376 v2hendroshadiAinda não há avaliações
- Sajet Vol 3 No4 12Documento13 páginasSajet Vol 3 No4 12Mir AamirAinda não há avaliações
- Tasc 2006 870526Documento4 páginasTasc 2006 870526Agustinus BAinda não há avaliações
- Cired: 21 International Conference On Electricity Distribution Frankfurt, 6-9 June 2011 Paper 0221Documento4 páginasCired: 21 International Conference On Electricity Distribution Frankfurt, 6-9 June 2011 Paper 0221kotiniAinda não há avaliações
- Networks On Chip (NOC) : Design ChallengesDocumento8 páginasNetworks On Chip (NOC) : Design ChallengesMohammad Seemab AslamAinda não há avaliações
- Power Systems Protection Coordination and Associated Reliability With Smart Grid SecurityDocumento6 páginasPower Systems Protection Coordination and Associated Reliability With Smart Grid SecurityPavan Kumar A GAinda não há avaliações
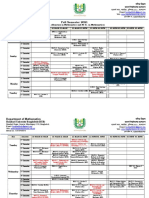
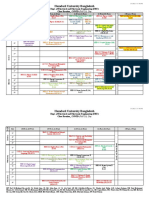
- Class R Online Fall-2021Documento3 páginasClass R Online Fall-2021Naeem HossainAinda não há avaliações
- Corona - Day Class Routine Fall'21 (04.1.22)Documento3 páginasCorona - Day Class Routine Fall'21 (04.1.22)Naeem HossainAinda não há avaliações
- Corona - Day Class Routine Fall'21Documento3 páginasCorona - Day Class Routine Fall'21Naeem HossainAinda não há avaliações
- Dept. of Electrical and Electronic Engineering Class Routine (Fall'21), EveningDocumento1 páginaDept. of Electrical and Electronic Engineering Class Routine (Fall'21), EveningNaeem HossainAinda não há avaliações
- EEE 435: Power Transmission and DistributionDocumento2 páginasEEE 435: Power Transmission and DistributionNaeem HossainAinda não há avaliações
- Course Code: EEE 411 Course Title: Microprocessor and Interfacing Credit: 3hours Rationale of The CourseDocumento2 páginasCourse Code: EEE 411 Course Title: Microprocessor and Interfacing Credit: 3hours Rationale of The CourseNaeem HossainAinda não há avaliações
- KDGJDFHFHGJF: Ritam Kumar Saha Cell: EmailDocumento4 páginasKDGJDFHFHGJF: Ritam Kumar Saha Cell: EmailNaeem HossainAinda não há avaliações
- Heaven's Light Is Our Guide: Rajshahi University of Engineering & Technology (RUET), RajshahiDocumento9 páginasHeaven's Light Is Our Guide: Rajshahi University of Engineering & Technology (RUET), RajshahiNaeem HossainAinda não há avaliações
- Classification of Radar Systems (1) : Imaging Radar / Non-Imaging RadarDocumento2 páginasClassification of Radar Systems (1) : Imaging Radar / Non-Imaging RadarNaeem HossainAinda não há avaliações
- VSC-HVDC Application For Enhancing Voltage Stability: Heaven's Light Is Our GuideDocumento1 páginaVSC-HVDC Application For Enhancing Voltage Stability: Heaven's Light Is Our GuideNaeem HossainAinda não há avaliações
- Heaven's Light Is Our Guide: Rajshahi University of Engineering & Technology (RUET), RajshahiDocumento6 páginasHeaven's Light Is Our Guide: Rajshahi University of Engineering & Technology (RUET), RajshahiNaeem HossainAinda não há avaliações
- Heaven's Light Is Our Guide: Rajshahi University of Engineering & Technology (RUET), RajshahiDocumento5 páginasHeaven's Light Is Our Guide: Rajshahi University of Engineering & Technology (RUET), RajshahiNaeem HossainAinda não há avaliações
- Mosfet PDFDocumento13 páginasMosfet PDFTad-electronics TadelectronicsAinda não há avaliações
- SYS VoomPC 2 Intel D2700MUD ManualDocumento4 páginasSYS VoomPC 2 Intel D2700MUD Manualbobmartin00Ainda não há avaliações
- E.E Labe-IVDocumento97 páginasE.E Labe-IVTadese AtomssaAinda não há avaliações
- 1406 2s1312 50hz Split Commercial Ac Series PDFDocumento57 páginas1406 2s1312 50hz Split Commercial Ac Series PDFRizwanAinda não há avaliações
- Electrostatics: PrefaceDocumento56 páginasElectrostatics: PrefaceTanishq AroraAinda não há avaliações
- Striker 2: Instruction ManualDocumento7 páginasStriker 2: Instruction ManualFredy Andres ValenciaAinda não há avaliações
- RONDS Intelligent Wireless Condition Monitoring System: Anhui Rong Zhi Ri Xin Information Technology Co., LTDDocumento12 páginasRONDS Intelligent Wireless Condition Monitoring System: Anhui Rong Zhi Ri Xin Information Technology Co., LTDMounicaRasagyaPallaAinda não há avaliações
- Circuit Breaker Interrupting Capacity Short Time Current RatingsDocumento23 páginasCircuit Breaker Interrupting Capacity Short Time Current RatingstechtricAinda não há avaliações
- Philips TV 7607 Service ManualDocumento257 páginasPhilips TV 7607 Service ManualPlayer NumberAinda não há avaliações
- Lincoln Ranger 225Documento6 páginasLincoln Ranger 225fdpc1987Ainda não há avaliações
- GE FanucDocumento21 páginasGE FanucABVSAIAinda não há avaliações
- LED SignalDocumento34 páginasLED SignalM Mubashshir WarisAinda não há avaliações
- Control Lab Report Experiment No. 04Documento2 páginasControl Lab Report Experiment No. 04Nahin AminAinda não há avaliações
- Circuit Theory: DR Paul S SpencerDocumento13 páginasCircuit Theory: DR Paul S SpencerMathew ClewlowAinda não há avaliações
- gx5500s MoDocumento100 páginasgx5500s MoHenry AlvaxAinda não há avaliações
- EP3 Thermostat InstallDocumento18 páginasEP3 Thermostat InstallmiguelAinda não há avaliações
- Day16emb8c0 Rev.c, Day16emb8co Rev.c, Y16e Dual Si 0527 Bom 15Documento44 páginasDay16emb8c0 Rev.c, Day16emb8co Rev.c, Y16e Dual Si 0527 Bom 15Vladimír Dravecký100% (2)
- Hydra: The Versatile DoorDocumento14 páginasHydra: The Versatile DoorAnnabella RossiniAinda não há avaliações
- Street Light Monitor and Control System Synopsis-1Documento8 páginasStreet Light Monitor and Control System Synopsis-1muskan sAinda não há avaliações
- Network Termination Unit STU4: Suppor Ting SHDSL - BisDocumento2 páginasNetwork Termination Unit STU4: Suppor Ting SHDSL - BisНатальяAinda não há avaliações
- ITN instructorPPT Chapter4Documento66 páginasITN instructorPPT Chapter4MuhammedYeshawAinda não há avaliações
- Huawei Power Systems Acceptance Manual - Update - 20190621Documento25 páginasHuawei Power Systems Acceptance Manual - Update - 20190621wawanAinda não há avaliações
- Fast Fourier Transform ReportDocumento19 páginasFast Fourier Transform ReportKarabo LetsholoAinda não há avaliações
- Silcopac D: Hardware SOFTWARE Basic Version BDocumento2 páginasSilcopac D: Hardware SOFTWARE Basic Version BGerardo BaltaAinda não há avaliações
- LAB 1.cDocumento13 páginasLAB 1.cMUHAMMAD AMMARAinda não há avaliações
- ELTE2.3 DBS3900 LTE TDD Basic Feature DescriptionDocumento92 páginasELTE2.3 DBS3900 LTE TDD Basic Feature DescriptioneuniceikaAinda não há avaliações
- Gea S1004 PDFDocumento8 páginasGea S1004 PDFmeirangongAinda não há avaliações
- Datasheet 98-8960-0 en 120V 60HzDocumento36 páginasDatasheet 98-8960-0 en 120V 60HzVanessa OggAinda não há avaliações
- Lenco Mes-202 enDocumento10 páginasLenco Mes-202 enBenoni RaileanuAinda não há avaliações