Você também pode gostar
- Engine Monitoring System (G3516B)Documento9 páginasEngine Monitoring System (G3516B)victor.cipriani100% (2)
- 3412C Marine Engine High Performance 3JK00146-UP (SEBP2969 - 54) - Documentación PDFDocumento29 páginas3412C Marine Engine High Performance 3JK00146-UP (SEBP2969 - 54) - Documentación PDFmanuel100% (1)
- Testing For Excessive Cylinder Blowby in 3500 EnginesDocumento10 páginasTesting For Excessive Cylinder Blowby in 3500 EnginesPILAR MARTINEZAinda não há avaliações
- G3520 SLD PDFDocumento43 páginasG3520 SLD PDFdanielh776100% (4)
- 3512 Engine Shutoff ValveDocumento2 páginas3512 Engine Shutoff Valveกัญญารัตน์ พูลทองAinda não há avaliações
- Cat XQ 2000 PDFDocumento7 páginasCat XQ 2000 PDFGerman O.100% (1)
- G3512 SpecDocumento4 páginasG3512 SpecnunkpAinda não há avaliações
- Búsqueda Del Medio - SEBU7898 - C18 Generator Set Cat Digital Voltage Regulator (Cat DVR)Documento4 páginasBúsqueda Del Medio - SEBU7898 - C18 Generator Set Cat Digital Voltage Regulator (Cat DVR)CEVegaOAinda não há avaliações
- Detonation SensorDocumento1 páginaDetonation Sensormiguel oswaldo gonzalez benitezAinda não há avaliações
- CAT - 3516H Engine OverspeedsDocumento3 páginasCAT - 3516H Engine Overspeedswagner_guimarães_1Ainda não há avaliações
- C32 Syc03519 - PSRPT - 2019-11-06 - 17.53.14 PDFDocumento4 páginasC32 Syc03519 - PSRPT - 2019-11-06 - 17.53.14 PDFiprahim202066100% (1)
- Sec4 G3516B DiagnosticDocumento9 páginasSec4 G3516B Diagnosticmuhammad arifAinda não há avaliações
- E539-E368 High Intake Manifold Air TempDocumento3 páginasE539-E368 High Intake Manifold Air TempBlog Teknisi100% (2)
- 3500B and 3500B High Displacement Generator Sets Electrical SystemDocumento2 páginas3500B and 3500B High Displacement Generator Sets Electrical SystemAliHabesAinda não há avaliações
- 3516C Marine Engine SISTEMA ELECTRICO-2Documento2 páginas3516C Marine Engine SISTEMA ELECTRICO-2JazzOlveAinda não há avaliações
- (REHS0371) Installation and Initial Start Up Procedures For G3300 and G3400 EnginesDocumento16 páginas(REHS0371) Installation and Initial Start Up Procedures For G3300 and G3400 Enginesvictor.cipriani100% (1)
- Diagnostic Trouble Codes: Localización y Solución de ProblemasDocumento8 páginasDiagnostic Trouble Codes: Localización y Solución de ProblemasAdolfo Dario SaavedraAinda não há avaliações
- REHS1438-09 Installation and Initial Start-Up Procedure For G3500C and G3500E Generator Set Engines PDFDocumento52 páginasREHS1438-09 Installation and Initial Start-Up Procedure For G3500C and G3500E Generator Set Engines PDFvoivod667% (3)
- 13 - PDFsam - REHS2892-08 Electrical A&I Guide For Frac Xmissions TH48-E70, TH55-E70 & TH55-E90Documento1 página13 - PDFsam - REHS2892-08 Electrical A&I Guide For Frac Xmissions TH48-E70, TH55-E70 & TH55-E90tvwrightAinda não há avaliações
- Electrical System High Voltage - Generator Off Package With EMCP 4.3 ControllerDocumento4 páginasElectrical System High Voltage - Generator Off Package With EMCP 4.3 Controllerwagner_guimarães_1Ainda não há avaliações
- Cylinder Cutout TestDocumento3 páginasCylinder Cutout TestPILAR MARTINEZ100% (1)
- Intake Manifold Air Temperature Is High: TroubleshootingDocumento3 páginasIntake Manifold Air Temperature Is High: TroubleshootingPutra JawaAinda não há avaliações
- c13 Cat Generator ShematicDocumento7 páginasc13 Cat Generator Shematicagvass0% (1)
- CAT - 3516H Detonation OccurrenceDocumento9 páginasCAT - 3516H Detonation Occurrencewagner_guimarães_1Ainda não há avaliações
- Parallel OperationDocumento54 páginasParallel OperationGabriel Paco LunaAinda não há avaliações
- Numeros de Parte de EMCPII Electronic Control (Generator Set) 3306 CaterpillarDocumento10 páginasNumeros de Parte de EMCPII Electronic Control (Generator Set) 3306 CaterpillarMariano ReyesAinda não há avaliações
- Event Codes PDFDocumento19 páginasEvent Codes PDFwagner_guimarães_1Ainda não há avaliações
- SENR1003 07 Nov2003Documento168 páginasSENR1003 07 Nov2003Eugene RadulianAinda não há avaliações
- Cat G3516BDocumento2 páginasCat G3516BSam SamAinda não há avaliações
- Cat Electronic Technician 2019C v1.0 Product Status ReportDocumento17 páginasCat Electronic Technician 2019C v1.0 Product Status ReportJalel SaidiAinda não há avaliações
- 9 - Gas A&I G3500-G3300 Ignition, Starting and Engine Protection SystemsDocumento37 páginas9 - Gas A&I G3500-G3300 Ignition, Starting and Engine Protection Systemsosama100% (2)
- E539 High Intake Manifold Air Temperature.Documento3 páginasE539 High Intake Manifold Air Temperature.Teo Sil Cas100% (1)
- CAT 3516 B and 3516 B High Displacement EnginesDocumento1 páginaCAT 3516 B and 3516 B High Displacement EnginesHemant RasamAinda não há avaliações
- Cat G3520C Engine Coal Mine GasDocumento6 páginasCat G3520C Engine Coal Mine GasJSH100Ainda não há avaliações
- CAT - G3516H Exhaust Temperature - Test PDFDocumento14 páginasCAT - G3516H Exhaust Temperature - Test PDFwagner_guimarães_1Ainda não há avaliações
- Interactive Schematic: This Document Is Best Viewed at A Screen Resolution of 1024 X 768Documento12 páginasInteractive Schematic: This Document Is Best Viewed at A Screen Resolution of 1024 X 768Mahmoud ElbakryAinda não há avaliações
- Adjustment of The Valve Lash and The Valve Bridge With The 147-5482Documento8 páginasAdjustment of The Valve Lash and The Valve Bridge With The 147-5482victor.cipriani50% (2)
- 3412C 680kvaDocumento7 páginas3412C 680kvaHarry King Corral AvenidoAinda não há avaliações
- Rodamientos de Alternadores CAT GILBERTO PANTOJADocumento16 páginasRodamientos de Alternadores CAT GILBERTO PANTOJAGilberto PantojaAinda não há avaliações
- Cat 3516Documento2 páginasCat 3516muhammad arif100% (1)
- Plano Schematic 3516 A3 PDFDocumento2 páginasPlano Schematic 3516 A3 PDFYessika AliendresAinda não há avaliações
- DDT Full Operating Manual-1901600540621502Documento85 páginasDDT Full Operating Manual-1901600540621502Sreepriodas Roy0% (1)
- G3600 A4 Brochures PDFDocumento4 páginasG3600 A4 Brochures PDFVictor NunezAinda não há avaliações
- General: Technical Data TAD721GEDocumento8 páginasGeneral: Technical Data TAD721GEbaljeetjatAinda não há avaliações
- Cat Electronic Technician 2019A v1.0 Configuration: Parameter ValueDocumento3 páginasCat Electronic Technician 2019A v1.0 Configuration: Parameter ValueMohamed Mohamed100% (1)
- Cat 3512B/3516BDocumento2 páginasCat 3512B/3516Bmohammad hazbehzad100% (2)
- CAT - 3516H Coolant Temperature Is HighDocumento5 páginasCAT - 3516H Coolant Temperature Is Highwagner_guimarães_1Ainda não há avaliações
- Gas Control Systems & IgnitionDocumento44 páginasGas Control Systems & Ignitionaaakengyahoo.comAinda não há avaliações
- 2954 4200 00 XRYS 557-577 CD - Product ReferenceDocumento6 páginas2954 4200 00 XRYS 557-577 CD - Product ReferenceALP69Ainda não há avaliações
- ShutoffDocumento27 páginasShutoffSergio Andrés ArizaAinda não há avaliações
- Rehs3668 Instalacion VR6Documento10 páginasRehs3668 Instalacion VR6julio cesarAinda não há avaliações
- Deflexión de CigueñalDocumento21 páginasDeflexión de CigueñalCatalina HuenumanAinda não há avaliações
- Cat 3516Documento2 páginasCat 3516Jose Daniel Ovando Mejia100% (7)
- Start Up G3500 PDFDocumento33 páginasStart Up G3500 PDFPancho ALAinda não há avaliações
- Schematic - 131675901 3512 Electronico PDFDocumento2 páginasSchematic - 131675901 3512 Electronico PDFkhanghanh2017 a0% (1)
- Esquema Principal de 3500 Cat PDFDocumento2 páginasEsquema Principal de 3500 Cat PDFClever Negrete NovaAinda não há avaliações
- Air Inlet and Exhaust SystemDocumento7 páginasAir Inlet and Exhaust SystemchanlinAinda não há avaliações
- Maintenance Bintang Diesel 3516Documento635 páginasMaintenance Bintang Diesel 3516bintang Diesel100% (1)
- 3512 ScematicDocumento2 páginas3512 Scematicmohamed hamedAinda não há avaliações
- SMCS - 1266-025Documento10 páginasSMCS - 1266-025hossen eskandaryAinda não há avaliações
- CAT - 3516H Engine Monitoring SystemDocumento5 páginasCAT - 3516H Engine Monitoring Systemwagner_guimarães_1Ainda não há avaliações
- CAT - G3516H Temperature Ratio of Coolant To Oil Is Low PDFDocumento3 páginasCAT - G3516H Temperature Ratio of Coolant To Oil Is Low PDFwagner_guimarães_1Ainda não há avaliações
- CAT - G3516H Oil Temperature Is High PDFDocumento3 páginasCAT - G3516H Oil Temperature Is High PDFwagner_guimarães_1Ainda não há avaliações
- CAT - G3516H Oil Pressure Is Low PDFDocumento5 páginasCAT - G3516H Oil Pressure Is Low PDFwagner_guimarães_1Ainda não há avaliações
- CAT - G3516H System Overview PDFDocumento3 páginasCAT - G3516H System Overview PDFwagner_guimarães_1100% (1)
- CAT - G3516H Throttle Actuator - Test PDFDocumento5 páginasCAT - G3516H Throttle Actuator - Test PDFwagner_guimarães_1Ainda não há avaliações
- CAT - G3516H Configuration Parameters - 3516HDocumento1 páginaCAT - G3516H Configuration Parameters - 3516Hwagner_guimarães_1Ainda não há avaliações
- CAT - G3516H Fuel Pressure Is High PDFDocumento2 páginasCAT - G3516H Fuel Pressure Is High PDFwagner_guimarães_1Ainda não há avaliações
- CAT - 3516H Engine OverspeedsDocumento3 páginasCAT - 3516H Engine Overspeedswagner_guimarães_1Ainda não há avaliações
- CAT - 3516H Engine Does Not CrankDocumento5 páginasCAT - 3516H Engine Does Not Crankwagner_guimarães_1Ainda não há avaliações
- CAT - G3516H Fuel Differential Pressure Is Low PDFDocumento2 páginasCAT - G3516H Fuel Differential Pressure Is Low PDFwagner_guimarães_1Ainda não há avaliações
- CAT - 3516H Detonation OccurrenceDocumento9 páginasCAT - 3516H Detonation Occurrencewagner_guimarães_1Ainda não há avaliações
- CAT - G3516H Generator Output Power - Test PDFDocumento3 páginasCAT - G3516H Generator Output Power - Test PDFwagner_guimarães_1Ainda não há avaliações
- CAT - G3516H Fuel Energy Content Problem PDFDocumento2 páginasCAT - G3516H Fuel Energy Content Problem PDFwagner_guimarães_1Ainda não há avaliações
- CAT - G3516H Fuel Pressure Is Low PDFDocumento3 páginasCAT - G3516H Fuel Pressure Is Low PDFwagner_guimarães_1Ainda não há avaliações
- CAT - G3516H Exhaust Temperature Is High PDFDocumento12 páginasCAT - G3516H Exhaust Temperature Is High PDFwagner_guimarães_1Ainda não há avaliações
- CAT - 3516H Diagnostic Trouble CodesDocumento20 páginasCAT - 3516H Diagnostic Trouble Codeswagner_guimarães_1100% (1)
- CAT - G3516H Exhaust Temperature - Test PDFDocumento14 páginasCAT - G3516H Exhaust Temperature - Test PDFwagner_guimarães_1Ainda não há avaliações
- Alternator Problem - Charging Problem and or Noisy Operation - 3516HDocumento3 páginasAlternator Problem - Charging Problem and or Noisy Operation - 3516Hwagner_guimarães_1Ainda não há avaliações
- Event Codes PDFDocumento19 páginasEvent Codes PDFwagner_guimarães_1Ainda não há avaliações
- Fuel Metering Valve - Test - TecJet Valve PDFDocumento6 páginasFuel Metering Valve - Test - TecJet Valve PDFwagner_guimarães_1Ainda não há avaliações
- CAT - 3516H Coolant Temperature Is HighDocumento5 páginasCAT - 3516H Coolant Temperature Is Highwagner_guimarães_1Ainda não há avaliações
- CAT - 3516H Engine Shutdown Occurs IntermittentlyDocumento3 páginasCAT - 3516H Engine Shutdown Occurs Intermittentlywagner_guimarães_1Ainda não há avaliações
- Esquema PDFDocumento2 páginasEsquema PDFwagner_guimarães_10% (1)
- CAT - 3516H Engine Shutdown or Start Inhibit Initiated by Driven EquipmentDocumento2 páginasCAT - 3516H Engine Shutdown or Start Inhibit Initiated by Driven Equipmentwagner_guimarães_1100% (1)
- CAT - 3516H Engine Stalls Immediately After StartingDocumento3 páginasCAT - 3516H Engine Stalls Immediately After Startingwagner_guimarães_1Ainda não há avaliações
- CAT - 3516H Coolant Pressure Is HighDocumento3 páginasCAT - 3516H Coolant Pressure Is Highwagner_guimarães_1Ainda não há avaliações
- CAT - 3516H Diagnostic CapabilitiesDocumento2 páginasCAT - 3516H Diagnostic Capabilitieswagner_guimarães_1100% (1)
- CAT - 3516H Engine Cranks But Does Not StartDocumento4 páginasCAT - 3516H Engine Cranks But Does Not Startwagner_guimarães_1100% (1)
- CAT - 3516H Engine Misfires, Runs Rough or Is UnstableDocumento5 páginasCAT - 3516H Engine Misfires, Runs Rough or Is Unstablewagner_guimarães_1Ainda não há avaliações
- Intelligent Robot (E) v03Documento6 páginasIntelligent Robot (E) v03Janko StrusaAinda não há avaliações
- 2 Titration Routine Maintenance Guide EN PDFDocumento16 páginas2 Titration Routine Maintenance Guide EN PDFAlynie Gomes100% (1)
- (Ultrasonic Radar-Naman Kataria-CSB) PresentationDocumento15 páginas(Ultrasonic Radar-Naman Kataria-CSB) PresentationHimanshu VermaAinda não há avaliações
- PLC User's ManualDocumento32 páginasPLC User's ManualAlex Porro Seclen33% (9)
- Smart Silos - Business PlanDocumento11 páginasSmart Silos - Business PlanHaris NaeemAinda não há avaliações
- Forest Fire Detection and Guiding Animals To A Safe Area by Using Sensor Networks and SoundDocumento4 páginasForest Fire Detection and Guiding Animals To A Safe Area by Using Sensor Networks and SoundAnonymous 6iFFjEpzYjAinda não há avaliações
- ME3122-1 Informal Lab ReportDocumento5 páginasME3122-1 Informal Lab ReportLuqman MohdariAinda não há avaliações
- Model 1200Documento4 páginasModel 1200evalencia100% (1)
- TC620 TC621 5V, Dual Trip Point Temperature Sensors: Features General DescriptionDocumento6 páginasTC620 TC621 5V, Dual Trip Point Temperature Sensors: Features General Descriptionmiki983Ainda não há avaliações
- (Ebook - PDF - Engineering) Allen Bradley Fundamentals of SensingDocumento175 páginas(Ebook - PDF - Engineering) Allen Bradley Fundamentals of Sensingrobertocadena100% (4)
- Trimble UX5 HPDocumento2 páginasTrimble UX5 HPRIZKIAinda não há avaliações
- BMS BOQ SL - NO # 3.2 - PS-HNDTXXX-RH SensorDocumento2 páginasBMS BOQ SL - NO # 3.2 - PS-HNDTXXX-RH Sensorsiraj sAinda não há avaliações
- Ramp Differential Expansion MeasurementsDocumento6 páginasRamp Differential Expansion MeasurementsJurun_BidanshiAinda não há avaliações
- AQ18FCN Service Manual - Shematic DiagramDocumento9 páginasAQ18FCN Service Manual - Shematic DiagramDrinski67Ainda não há avaliações
- Altec LMAP Calibration Manual EnglishDocumento22 páginasAltec LMAP Calibration Manual EnglishRuben De La RosaAinda não há avaliações
- InstallationDocumento156 páginasInstallationAkhir Widada100% (1)
- A6V10489489 - Data Sheet For Product - Presence Detector, Constant Controller UP 258E22 - enDocumento12 páginasA6V10489489 - Data Sheet For Product - Presence Detector, Constant Controller UP 258E22 - enCartman SpAinda não há avaliações
- 10 Types of SensorsDocumento4 páginas10 Types of SensorsRivegel BaclayAinda não há avaliações
- FDocumento30 páginasFestionsAinda não há avaliações
- Smoke Detector Data Sheet Model DI-9101Documento2 páginasSmoke Detector Data Sheet Model DI-9101Ber Salazar Jr100% (1)
- Syahida RCS2515A FYP Chapter 1Documento5 páginasSyahida RCS2515A FYP Chapter 1qtjwAinda não há avaliações
- LPG Gas Sensor Interfacing With 8051Documento8 páginasLPG Gas Sensor Interfacing With 8051gprodan2002a2948Ainda não há avaliações
- D2872.1207683-1 - RTFOT - NormaDocumento6 páginasD2872.1207683-1 - RTFOT - NormaDenny SantanaAinda não há avaliações
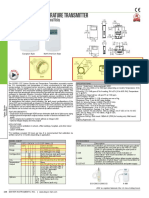
- Carbon Dioxide/Temperature Transmitter: Ndir Co Sensor, Universal Outputs, Optional RelayDocumento1 páginaCarbon Dioxide/Temperature Transmitter: Ndir Co Sensor, Universal Outputs, Optional Relayismi iqhwan ihsanAinda não há avaliações
- PAT IFLEX5 Service ManualDocumento79 páginasPAT IFLEX5 Service ManualCarlos ZuñigaAinda não há avaliações
- Vehicle Component OverviewDocumento128 páginasVehicle Component OverviewEntretecnicosAinda não há avaliações
- Intelligent Digital Pressure Modules Additel 161, 161exDocumento3 páginasIntelligent Digital Pressure Modules Additel 161, 161exMarcoAinda não há avaliações
- Moisture SensorDocumento14 páginasMoisture Sensorchris22025280% (5)
- Bioinstrumentation 1: Associate Professor Dr. Nashrul Fazli Bin Mohd NasirDocumento32 páginasBioinstrumentation 1: Associate Professor Dr. Nashrul Fazli Bin Mohd NasirHui QingAinda não há avaliações