Você também pode gostar
- Chapter 3Documento15 páginasChapter 3abdu yimerAinda não há avaliações
- Handbook of Railroad Construction; For the use of American engineersNo EverandHandbook of Railroad Construction; For the use of American engineersAinda não há avaliações
- Accuracy of Viscous Resistance Computations For Ships Including Free Surface EffectsDocumento4 páginasAccuracy of Viscous Resistance Computations For Ships Including Free Surface Effectsabjm5822Ainda não há avaliações
- Hydraulic Tables; The Elements Of Gagings And The Friction Of Water Flowing In Pipes, Aqueducts, Sewers, Etc., As Determined By The Hazen And Williams Formula And The Flow Of Water Over The Sharp-Edged And Irregular Weirs, And The Quantity DischargedNo EverandHydraulic Tables; The Elements Of Gagings And The Friction Of Water Flowing In Pipes, Aqueducts, Sewers, Etc., As Determined By The Hazen And Williams Formula And The Flow Of Water Over The Sharp-Edged And Irregular Weirs, And The Quantity DischargedAinda não há avaliações
- 3 - Seepage AnalysisDocumento39 páginas3 - Seepage AnalysisFaran Assif0% (1)
- Navigation & Voyage Planning Companions: Navigation, Nautical Calculation & Passage Planning CompanionsNo EverandNavigation & Voyage Planning Companions: Navigation, Nautical Calculation & Passage Planning CompanionsAinda não há avaliações
- SDTM 3 PDFDocumento6 páginasSDTM 3 PDFGurwinder SinghAinda não há avaliações
- Mediciones de Capacitancia-VoltajeDocumento15 páginasMediciones de Capacitancia-VoltajeedanfuAinda não há avaliações
- Chap 3Documento15 páginasChap 3hoang406Ainda não há avaliações
- TankersDocumento19 páginasTankersMohamed EssamAinda não há avaliações
- Lab OrificeDocumento14 páginasLab OrificemarkAinda não há avaliações
- 04 23 98 Critical Mode Control Stabilizes Switch Mode Power SuppliesDocumento3 páginas04 23 98 Critical Mode Control Stabilizes Switch Mode Power Suppliestinix84Ainda não há avaliações
- Report NACA 23012 PDFDocumento24 páginasReport NACA 23012 PDFHimanshu ModiAinda não há avaliações
- Computation of Perspective KRISO Containership Towing Tests With The Help of The Complex of Hydrodynamical Analysis FlowVisionDocumento10 páginasComputation of Perspective KRISO Containership Towing Tests With The Help of The Complex of Hydrodynamical Analysis FlowVisionSADULLAHAinda não há avaliações
- Lecturenote - 2126628829open Channel Hydraulics Chapter ThreeDocumento20 páginasLecturenote - 2126628829open Channel Hydraulics Chapter ThreeAlfatah muhumedAinda não há avaliações
- "Surfaces: Overview," Section 2.3.1 Coupling Kinematic Distributing "Defining Coupling Constraints," Section 15.15.4 of The Abaqus/CAE User's GuideDocumento10 páginas"Surfaces: Overview," Section 2.3.1 Coupling Kinematic Distributing "Defining Coupling Constraints," Section 15.15.4 of The Abaqus/CAE User's Guidepicci4Ainda não há avaliações
- Var Cap MeasureDocumento5 páginasVar Cap MeasureAlex WongAinda não há avaliações
- Prelisaminary Ship DesignDocumento44 páginasPrelisaminary Ship DesignSurajPowarAinda não há avaliações
- 11aDocumento69 páginas11aDan FarrisAinda não há avaliações
- Boundary Conditions Available in ANSYS FluentDocumento3 páginasBoundary Conditions Available in ANSYS FluentAnonymous KVkTrZ7gzd100% (1)
- Class Project On Using The Direct Step Method To Profile Water SurfacesDocumento7 páginasClass Project On Using The Direct Step Method To Profile Water SurfacesBrockAinda não há avaliações
- III. Ground-Water Management Problem Used For The ExercisesDocumento25 páginasIII. Ground-Water Management Problem Used For The ExercisesmarimarinowaAinda não há avaliações
- Bell e Mehta 1988Documento39 páginasBell e Mehta 1988Nelson LondoñoAinda não há avaliações
- Boundary-Layer Approximations For Laminar FlowDocumento9 páginasBoundary-Layer Approximations For Laminar FlowNaila NasreenAinda não há avaliações
- CH 3 Vector CalculusDocumento16 páginasCH 3 Vector CalculusHemal ParikhAinda não há avaliações
- Single Culvert (Multiple Identical Barrels) : Example 3Documento28 páginasSingle Culvert (Multiple Identical Barrels) : Example 3Hizbul Maulana AnangAinda não há avaliações
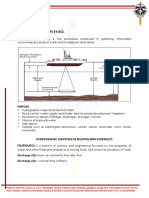
- Hydrographic SurveyDocumento13 páginasHydrographic SurveyVerlyn Kate Pang-ayAinda não há avaliações
- Entrainment Boundary Conditions For Free Shear FlowsDocumento8 páginasEntrainment Boundary Conditions For Free Shear FlowsKuldhirAinda não há avaliações
- Design of An AqueductDocumento7 páginasDesign of An Aqueduct4gen_5Ainda não há avaliações
- 3 Hydro StabDocumento56 páginas3 Hydro StabTullio Opatti100% (1)
- Steady Flow - Water Surface Profiles: EM 1110-2-1416 15 Oct 93Documento27 páginasSteady Flow - Water Surface Profiles: EM 1110-2-1416 15 Oct 93Natasha GybzyAinda não há avaliações
- ENGR2000 Chapter 03 NotesDocumento17 páginasENGR2000 Chapter 03 NotesHiumi K.Ainda não há avaliações
- Applications of Von Karman's Integral Momentum Equation For Boundary LayersDocumento7 páginasApplications of Von Karman's Integral Momentum Equation For Boundary LayersPaola CinnellaAinda não há avaliações
- 3phaseconductanceSPEJ (Full Permission)Documento10 páginas3phaseconductanceSPEJ (Full Permission)juan joseAinda não há avaliações
- Tneb - Ae - Civil: Boundary Layer TheoryDocumento40 páginasTneb - Ae - Civil: Boundary Layer TheoryjkAinda não há avaliações
- Reference Manual - Macra - R7 - 04Documento23 páginasReference Manual - Macra - R7 - 04Jeric Dela Cruz QuiminalesAinda não há avaliações
- Methods For The Drag Reduction of Bluff Bodies and Their Application To Heavy Road-Vehicles G. Buresti, G.V. Iungo, G. LombardiDocumento33 páginasMethods For The Drag Reduction of Bluff Bodies and Their Application To Heavy Road-Vehicles G. Buresti, G.V. Iungo, G. LombardiArpit DodiaAinda não há avaliações
- A Historical and Technical Overview of The CB Coefficient in The AISC SpecificationsDocumento5 páginasA Historical and Technical Overview of The CB Coefficient in The AISC SpecificationscharlesroberAinda não há avaliações
- Flood RoutingDocumento8 páginasFlood RoutingLuna KimAinda não há avaliações
- Flow Measurement (Compatibility Mode)Documento11 páginasFlow Measurement (Compatibility Mode)NRNiloyAinda não há avaliações
- Fillet White PaperDocumento10 páginasFillet White PaperRod ManserAinda não há avaliações
- NSC1701 Feature 9Documento3 páginasNSC1701 Feature 9MoonzeAinda não há avaliações
- FDC Australia PDFDocumento6 páginasFDC Australia PDFRaul TyvAinda não há avaliações
- DPM Section3 HydraulicDesignDocumento102 páginasDPM Section3 HydraulicDesignAym BenjAinda não há avaliações
- How To Design BarrageDocumento6 páginasHow To Design BarrageRaja HilalAinda não há avaliações
- Figure 9.16. Nowood River Near Ten Sleep, Wyoming (Example 15)Documento125 páginasFigure 9.16. Nowood River Near Ten Sleep, Wyoming (Example 15)Carlos ValerioAinda não há avaliações
- Handbook of PVC Pipe Chap6 PDFDocumento44 páginasHandbook of PVC Pipe Chap6 PDFWolfnkom NkomAinda não há avaliações
- 3.0 Open Channel Flow 3-1Documento41 páginas3.0 Open Channel Flow 3-1Muhammad Mubashir QureshiAinda não há avaliações
- Design of An Aqueduct - CompressDocumento5 páginasDesign of An Aqueduct - CompressMursaleen BawarAinda não há avaliações
- ,. Over A Catchment.: The Rising Limb ABDocumento11 páginas,. Over A Catchment.: The Rising Limb ABAlamgir KhalilAinda não há avaliações
- Open Channel Hydraulics Chapter Three: 3. Rapidly Varied Flow (RVF)Documento17 páginasOpen Channel Hydraulics Chapter Three: 3. Rapidly Varied Flow (RVF)mustefa kelilAinda não há avaliações
- BOUNDARY LAYER FinalDocumento16 páginasBOUNDARY LAYER Finaleldhopaul19894886Ainda não há avaliações
- Effective Discharge Calculation: by D. S. Biedenharn and R. R. CopelandDocumento10 páginasEffective Discharge Calculation: by D. S. Biedenharn and R. R. CopelandCamila FigueroaAinda não há avaliações
- Detailed MOS Gate Capacitance Model: Chapter 2 MOS Transistor TheoryDocumento1 páginaDetailed MOS Gate Capacitance Model: Chapter 2 MOS Transistor TheoryCarlos SaavedraAinda não há avaliações
- Variation - Swing MethodDocumento5 páginasVariation - Swing MethodDuy Ngô0% (1)
- Voltage RampDocumento5 páginasVoltage RampRanjitha JadhavAinda não há avaliações
- 650 150Documento10 páginas650 150ツ ツAinda não há avaliações
- Ctran Modeling PDFDocumento101 páginasCtran Modeling PDFRicardoAinda não há avaliações
- FEM Simulation of Interface Problem For Laterally Loaded Piles in PermafrostDocumento16 páginasFEM Simulation of Interface Problem For Laterally Loaded Piles in PermafrostChiorean VasileAinda não há avaliações
- Adam PDFDocumento3 páginasAdam PDFChiorean VasileAinda não há avaliações
- Adam PDFDocumento3 páginasAdam PDFChiorean VasileAinda não há avaliações
- PLAXIS 2D 2017-Tutorial-Lesson02 PDFDocumento15 páginasPLAXIS 2D 2017-Tutorial-Lesson02 PDFDragos BogdanAinda não há avaliações
- InfoDocumento16 páginasInfoChiorean VasileAinda não há avaliações
- Cer NobilDocumento18 páginasCer NobilChiorean VasileAinda não há avaliações
- Cer NobilDocumento37 páginasCer NobilChiorean VasileAinda não há avaliações
- Cap PilotDocumento1 páginaCap PilotChiorean VasileAinda não há avaliações
- 509Documento11 páginas509Shashank Kasliwal100% (2)
- BMHDocumento2 páginasBMHChiorean VasileAinda não há avaliações
- ShapesDocumento1 páginaShapesChiorean VasileAinda não há avaliações
- SoilWorks DescriptionDocumento78 páginasSoilWorks DescriptionChiorean VasileAinda não há avaliações
- Full Page PhotoDocumento1 páginaFull Page PhotoChiorean VasileAinda não há avaliações
- Full Page PhotoDocumento1 páginaFull Page PhotoChiorean VasileAinda não há avaliações
- One Pile in SoilDocumento1 páginaOne Pile in SoilChiorean VasileAinda não há avaliações
- Desen 14Documento1 páginaDesen 14Chiorean VasileAinda não há avaliações
- Drawing1 ModelDocumento1 páginaDrawing1 ModelChiorean VasileAinda não há avaliações
- Engineering Properties of SoilDocumento6 páginasEngineering Properties of Soilpapilolo2008Ainda não há avaliações
- GRAFICADocumento1 páginaGRAFICAChiorean VasileAinda não há avaliações
- Art NewDocumento1 páginaArt NewChiorean VasileAinda não há avaliações
- Practical Estimates of Rock Mass - StrengthHoek & Brown V V ExcellentDocumento26 páginasPractical Estimates of Rock Mass - StrengthHoek & Brown V V ExcellentGEOMAHESHAinda não há avaliações
- SVFlux Examples ManualDocumento97 páginasSVFlux Examples ManualChiorean Vasile0% (1)
- Ron Louis TALK To WOMEN Pick Up SeductionDocumento166 páginasRon Louis TALK To WOMEN Pick Up SeductionChiorean Vasile100% (3)
- G1 MDocumento1 páginaG1 MChiorean VasileAinda não há avaliações
- The World of CyclophanesDocumento6 páginasThe World of CyclophanesDivya NarayanAinda não há avaliações
- Cuphea OilDocumento8 páginasCuphea Oilmssganesh1305Ainda não há avaliações
- Unit 1 Cement and ConcreteDocumento130 páginasUnit 1 Cement and Concretehamshini100% (1)
- ChemCAD Assignment SPR05Documento3 páginasChemCAD Assignment SPR05laiping_lum0% (1)
- (MVS) ExhalitesDocumento9 páginas(MVS) ExhalitesSalvadora1Ainda não há avaliações
- Name: Vine Ortega Bsmls - 1Documento4 páginasName: Vine Ortega Bsmls - 1Vine OrtegaAinda não há avaliações
- Chapter 3Documento3 páginasChapter 3Quennie Dhea AdanzaAinda não há avaliações
- Free EnergyDocumento17 páginasFree EnergyDolih GozaliAinda não há avaliações
- Growth Kinetic Models For Microalgae Cultivation A ReviewDocumento16 páginasGrowth Kinetic Models For Microalgae Cultivation A ReviewJesús Eduardo De la CruzAinda não há avaliações
- BASIC ChemistryDocumento16 páginasBASIC ChemistryNurharis MunandarAinda não há avaliações
- Well LoggingDocumento57 páginasWell LoggingLaura DemarchAinda não há avaliações
- The State of MixingDocumento6 páginasThe State of MixingNico RobinAinda não há avaliações
- Activity Number 2Documento9 páginasActivity Number 2Mariella SingsonAinda não há avaliações
- ASTM GradesDocumento4 páginasASTM GradesSaurabh MundheAinda não há avaliações
- Centrifugal Pump Piping Design LayoutDocumento19 páginasCentrifugal Pump Piping Design Layoutvijayakumar2015Ainda não há avaliações
- Rochelle's Salt As An Alternative PiezoelectricDocumento10 páginasRochelle's Salt As An Alternative PiezoelectricSudharshan KomandurAinda não há avaliações
- This Manual Includes: Repair Procedures Fault Codes Electrical and Hydraulic SchematicsDocumento187 páginasThis Manual Includes: Repair Procedures Fault Codes Electrical and Hydraulic Schematicsaa100% (1)
- Chapter 1 CHEMISTRYDocumento4 páginasChapter 1 CHEMISTRYAmit Kumar SinghAinda não há avaliações
- Sekine Et Al 2011 EPSLDocumento10 páginasSekine Et Al 2011 EPSLpleasure masangoAinda não há avaliações
- Sikaceram - 288 MyDocumento4 páginasSikaceram - 288 MyKenji TanAinda não há avaliações
- 110 WS Solutions KeyDocumento2 páginas110 WS Solutions Keyshanmugam karthickAinda não há avaliações
- Specific Heat Capacity Lab Report2Documento6 páginasSpecific Heat Capacity Lab Report2milayosores100% (2)
- Short Note Modelling of A Crude Distillation Column: LANG', Szalp&S, G. Chikany' Kemi%Ny'Documento7 páginasShort Note Modelling of A Crude Distillation Column: LANG', Szalp&S, G. Chikany' Kemi%Ny'Luis Rodriguez GonzalesAinda não há avaliações
- Science Form 1 NoteDocumento5 páginasScience Form 1 NoteDaniel ChanAinda não há avaliações
- Thermal Decay Tool Logging TrainingDocumento4 páginasThermal Decay Tool Logging TrainingHamdan HamzahAinda não há avaliações
- Dovidovits - Geopolymer Chemistry and Applications PDFDocumento33 páginasDovidovits - Geopolymer Chemistry and Applications PDFdimas dibiantara0% (1)
- NFL BathindaDocumento26 páginasNFL BathindaSukhman ChahalAinda não há avaliações
- Spread4Documento2 páginasSpread4Mmasichukwu UmeriohaAinda não há avaliações
- WHO Monograph CurcumaDocumento8 páginasWHO Monograph CurcumaMuhammad Miftahul HudaAinda não há avaliações
- ParaPro Assessment Preparation 2023-2024: Study Guide with 300 Practice Questions and Answers for the ETS Praxis Test (Paraprofessional Exam Prep)No EverandParaPro Assessment Preparation 2023-2024: Study Guide with 300 Practice Questions and Answers for the ETS Praxis Test (Paraprofessional Exam Prep)Ainda não há avaliações
- Basic Math & Pre-Algebra Workbook For Dummies with Online PracticeNo EverandBasic Math & Pre-Algebra Workbook For Dummies with Online PracticeNota: 4 de 5 estrelas4/5 (2)
- Build a Mathematical Mind - Even If You Think You Can't Have One: Become a Pattern Detective. Boost Your Critical and Logical Thinking Skills.No EverandBuild a Mathematical Mind - Even If You Think You Can't Have One: Become a Pattern Detective. Boost Your Critical and Logical Thinking Skills.Nota: 5 de 5 estrelas5/5 (1)
- Quantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsNo EverandQuantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsNota: 4.5 de 5 estrelas4.5/5 (3)
- Images of Mathematics Viewed Through Number, Algebra, and GeometryNo EverandImages of Mathematics Viewed Through Number, Algebra, and GeometryAinda não há avaliações
- Mathematical Mindsets: Unleashing Students' Potential through Creative Math, Inspiring Messages and Innovative TeachingNo EverandMathematical Mindsets: Unleashing Students' Potential through Creative Math, Inspiring Messages and Innovative TeachingNota: 4.5 de 5 estrelas4.5/5 (21)
- Calculus Workbook For Dummies with Online PracticeNo EverandCalculus Workbook For Dummies with Online PracticeNota: 3.5 de 5 estrelas3.5/5 (8)
- Fluent in 3 Months: How Anyone at Any Age Can Learn to Speak Any Language from Anywhere in the WorldNo EverandFluent in 3 Months: How Anyone at Any Age Can Learn to Speak Any Language from Anywhere in the WorldNota: 3 de 5 estrelas3/5 (79)
- Mental Math: How to Develop a Mind for Numbers, Rapid Calculations and Creative Math Tricks (Including Special Speed Math for SAT, GMAT and GRE Students)No EverandMental Math: How to Develop a Mind for Numbers, Rapid Calculations and Creative Math Tricks (Including Special Speed Math for SAT, GMAT and GRE Students)Ainda não há avaliações
- Who Tells the Truth?: Collection of Logical Puzzles to Make You ThinkNo EverandWho Tells the Truth?: Collection of Logical Puzzles to Make You ThinkNota: 5 de 5 estrelas5/5 (1)
- How Math Explains the World: A Guide to the Power of Numbers, from Car Repair to Modern PhysicsNo EverandHow Math Explains the World: A Guide to the Power of Numbers, from Car Repair to Modern PhysicsNota: 3.5 de 5 estrelas3.5/5 (9)
- A Guide to Success with Math: An Interactive Approach to Understanding and Teaching Orton Gillingham MathNo EverandA Guide to Success with Math: An Interactive Approach to Understanding and Teaching Orton Gillingham MathNota: 5 de 5 estrelas5/5 (1)
- Transform Your 6-12 Math Class: Digital Age Tools to Spark LearningNo EverandTransform Your 6-12 Math Class: Digital Age Tools to Spark LearningAinda não há avaliações
- Magic Multiplication: Discover the Ultimate Formula for Fast MultiplicationNo EverandMagic Multiplication: Discover the Ultimate Formula for Fast MultiplicationAinda não há avaliações