Você também pode gostar
- Singapore in a Post-Kyoto World: Energy, Environment and the EconomyNo EverandSingapore in a Post-Kyoto World: Energy, Environment and the EconomyAinda não há avaliações
- Case Study Fin376 Group 5Documento21 páginasCase Study Fin376 Group 5Ping IceAinda não há avaliações
- Figure 1. Methodology Flowchart For The Project, "Triboelectric Effect Based Energy Harvester For Self-Powered ConsumerDocumento10 páginasFigure 1. Methodology Flowchart For The Project, "Triboelectric Effect Based Energy Harvester For Self-Powered ConsumerDenver LodricoAinda não há avaliações
- 2019 JC2 H1 Economics Prelim Anglo Chinese Junior CollegeDocumento11 páginas2019 JC2 H1 Economics Prelim Anglo Chinese Junior CollegeTimothy HandokoAinda não há avaliações
- June 2020 (v1) QP - Paper 4 Cie Maths IgcseDocumento20 páginasJune 2020 (v1) QP - Paper 4 Cie Maths IgcseSeba AlshehriAinda não há avaliações
- Geometry and Equations FinalDocumento13 páginasGeometry and Equations Finalvarun.y7676Ainda não há avaliações
- Blackboard Collaborate ?? K12 - 3994419 Jun 3, 2019 7:22:22 PMDocumento11 páginasBlackboard Collaborate ?? K12 - 3994419 Jun 3, 2019 7:22:22 PMThe MagicianAinda não há avaliações
- AbcdDocumento3 páginasAbcdDasari Naveen RajAinda não há avaliações
- Circular (1) 539782Documento1 páginaCircular (1) 539782joshi madhavAinda não há avaliações
- PVP SampleDocumento3 páginasPVP SampleKaren PrayAinda não há avaliações
- Cost-Benefit Analysis of Continuation and Abandonment of Vishnugad-Pipalkoti HEPDocumento25 páginasCost-Benefit Analysis of Continuation and Abandonment of Vishnugad-Pipalkoti HEPBharat JhunjhunwalaAinda não há avaliações
- High Court For The State of TelanganaDocumento22 páginasHigh Court For The State of TelanganaharrisshaAinda não há avaliações
- GMHDocumento115 páginasGMHRegina LagaticAinda não há avaliações
- Ehr PDFDocumento1 páginaEhr PDFAnonymous KzJcjGCJbAinda não há avaliações
- Rekap Tiket Kia: Nama Penumpang Rute Harga TGL Invoice No. Invoice Tgl. Terima InvoiceDocumento12 páginasRekap Tiket Kia: Nama Penumpang Rute Harga TGL Invoice No. Invoice Tgl. Terima Invoiceirfan haddy ridwantoAinda não há avaliações
- Pdfreport PDFDocumento33 páginasPdfreport PDFHimanshu SharmaAinda não há avaliações
- 0580 s19 QP 11 PDFDocumento12 páginas0580 s19 QP 11 PDFMajed AlIraqiAinda não há avaliações
- Guru Gobind Singh Polytechnic, Nashik: Department: Applied ScienceDocumento5 páginasGuru Gobind Singh Polytechnic, Nashik: Department: Applied SciencesakshiAinda não há avaliações
- 2019 Petroskills Training ScheduleDocumento26 páginas2019 Petroskills Training ScheduleLahcen SeddikiAinda não há avaliações
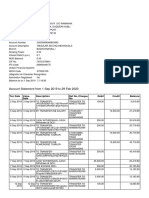
- Account Statement From 1 Sep 2019 To 29 Feb 2020: TXN Date Value Date Description Ref No./Cheque No. Debit Credit BalanceDocumento14 páginasAccount Statement From 1 Sep 2019 To 29 Feb 2020: TXN Date Value Date Description Ref No./Cheque No. Debit Credit BalanceNavarang R KobbeAinda não há avaliações
- Wp-Content Uploads 2017 02 Gantt Chart Template PM - Com 2018Documento10 páginasWp-Content Uploads 2017 02 Gantt Chart Template PM - Com 2018Precious Dayanan IIAinda não há avaliações
- 0 MPPSC Economy AspirantsDocumento9 páginas0 MPPSC Economy AspirantsThakur Sourabh SinghAinda não há avaliações
- March 2019 (v2) QP - Paper 2 CIE Maths IGCSEDocumento12 páginasMarch 2019 (v2) QP - Paper 2 CIE Maths IGCSEYuuvraaj JainAinda não há avaliações
- Maths June 2017 (v3) QP - Paper 4 CIE Maths IGCSEDocumento20 páginasMaths June 2017 (v3) QP - Paper 4 CIE Maths IGCSEThapelo JeremiahAinda não há avaliações
- Debit ExcavatorDocumento4 páginasDebit ExcavatorRahul kumarAinda não há avaliações
- Ecoenergy Quiz-2023 - Google FormsDocumento37 páginasEcoenergy Quiz-2023 - Google FormsShweta JoshiAinda não há avaliações
- Appendix A Geotechnical Investigation Report Part 3Documento60 páginasAppendix A Geotechnical Investigation Report Part 3hayyanAinda não há avaliações
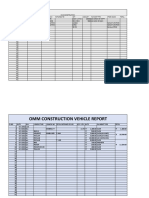
- Data Base of Omm ConstructionDocumento6 páginasData Base of Omm ConstructionSANKALPA SOVAN SAMALAinda não há avaliações
- 2059 s18 in 02Documento4 páginas2059 s18 in 02Shahaan IslamAinda não há avaliações
- (ECON2103) (2019) (F) Midterm Ukqq33 12426Documento6 páginas(ECON2103) (2019) (F) Midterm Ukqq33 12426kotszhimrickyAinda não há avaliações
- JUNIDocumento24 páginasJUNIMaureen DelaniAinda não há avaliações
- Presentation, ADB Mission-June, 2018-27.06.18Documento56 páginasPresentation, ADB Mission-June, 2018-27.06.18Khairul IslamAinda não há avaliações
- Lecture 3-4 - Electric Field CalculationsDocumento44 páginasLecture 3-4 - Electric Field Calculationssalamat lang akinAinda não há avaliações
- Ee/ofc/19-20/117 17/09/2019 (7) Ee/ofc/19-20/117: GST GST GSTDocumento2 páginasEe/ofc/19-20/117 17/09/2019 (7) Ee/ofc/19-20/117: GST GST GSTramu83Ainda não há avaliações
- 509 Bob Statement PDFDocumento1 página509 Bob Statement PDFMansuri SalmanAinda não há avaliações
- Eddy Etame Etame: Cambridge International General Certificate of Secondary EducationDocumento20 páginasEddy Etame Etame: Cambridge International General Certificate of Secondary EducationgreenAinda não há avaliações
- Greenwood Public School: Ch. 4 Solving Tough Problems of LifeDocumento1 páginaGreenwood Public School: Ch. 4 Solving Tough Problems of LifeLakshya JindalAinda não há avaliações
- Cambridge International General Certificate of Secondary EducationDocumento1.136 páginasCambridge International General Certificate of Secondary EducationJoumana WalidAinda não há avaliações
- 0580 s17 QP 41Documento16 páginas0580 s17 QP 41yuke kristinaAinda não há avaliações
- Earthing DetailDocumento2 páginasEarthing DetailRavi RanjanAinda não há avaliações
- Summer Internship Report L&TDocumento52 páginasSummer Internship Report L&Tanon_238993516Ainda não há avaliações
- 19L1 PDFDocumento38 páginas19L1 PDFSaurabhAinda não há avaliações
- SL No. Project Jobs Completed Received Date Commented/Approval Date Rcc/Structural Qty RemarksDocumento1 páginaSL No. Project Jobs Completed Received Date Commented/Approval Date Rcc/Structural Qty RemarksGautam AcharyyaAinda não há avaliações
- CORRIGENDUM-I Vide NoDocumento1 páginaCORRIGENDUM-I Vide NoromeoremoAinda não há avaliações
- Mechanical Engineering 3rd Year TepiDocumento12 páginasMechanical Engineering 3rd Year TepiwabdushukurAinda não há avaliações
- Energetics XDocumento19 páginasEnergetics XTravellerAinda não há avaliações
- North South University: Department of Environment Science and ManagementDocumento11 páginasNorth South University: Department of Environment Science and ManagementKabulAinda não há avaliações
- Government of Gilgit-BaltistanDocumento3 páginasGovernment of Gilgit-BaltistanJaffarHussainAinda não há avaliações
- College and Career PresentationDocumento12 páginasCollege and Career Presentationapi-266384065Ainda não há avaliações
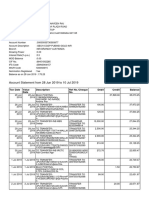
- Account Statement From 1 Apr 2019 To 31 Mar 2020: TXN Date Value Date Description Ref No./Cheque No. Debit Credit BalanceDocumento14 páginasAccount Statement From 1 Apr 2019 To 31 Mar 2020: TXN Date Value Date Description Ref No./Cheque No. Debit Credit Balanceप्रियरंजन सिंह राजपूतAinda não há avaliações
- James Ruse 2014 Year 9 Maths Yearly & SolutionsDocumento9 páginasJames Ruse 2014 Year 9 Maths Yearly & SolutionsJacob NathAinda não há avaliações
- Account Statement From 20 May 2019 To 20 Nov 2019Documento8 páginasAccount Statement From 20 May 2019 To 20 Nov 2019SDE PONNERIAinda não há avaliações
- AQAR REPORT 2019-20 Government Commerce College, GandhinagarDocumento33 páginasAQAR REPORT 2019-20 Government Commerce College, GandhinagarAcross BordersAinda não há avaliações
- Gantt Chart Template Info IaDocumento4 páginasGantt Chart Template Info IaJevaun BoydAinda não há avaliações
- Account Statement As of 28-07-2019 12:28:42 GMT +0530Documento1 páginaAccount Statement As of 28-07-2019 12:28:42 GMT +0530Anonymous uFgGTgBIAinda não há avaliações
- ES 4 Final QuestionsDocumento2 páginasES 4 Final QuestionsEarl AradoAinda não há avaliações
- Centrifuge Long Run Project WorkDocumento15 páginasCentrifuge Long Run Project WorkHARVENDRA9022 SINGHAinda não há avaliações
- Worksheet 2Documento2 páginasWorksheet 2alyAinda não há avaliações
- June 2020 (v2) QP - Paper 4 Cie Maths IgcseDocumento20 páginasJune 2020 (v2) QP - Paper 4 Cie Maths IgcsePhương Lê NhãAinda não há avaliações
- Full Maht Revision WKDocumento176 páginasFull Maht Revision WKsamskruthamanabroluAinda não há avaliações
- Digital Signal ProcessingDocumento1 páginaDigital Signal ProcessingAkashdeep BhattacharjeeAinda não há avaliações
- Write A Java Applet To Display A Textual Content On The BrowserDocumento4 páginasWrite A Java Applet To Display A Textual Content On The BrowserAkashdeep BhattacharjeeAinda não há avaliações
- ModifiedDocumento15 páginasModifiedAkashdeep BhattacharjeeAinda não há avaliações
- Probability Theory and Random Processes:: Digital Communication EC-601 Contracts: 3L Credits-3 Module - IDocumento1 páginaProbability Theory and Random Processes:: Digital Communication EC-601 Contracts: 3L Credits-3 Module - IAkashdeep BhattacharjeeAinda não há avaliações
- ECE Curriculum EssentialDocumento105 páginasECE Curriculum EssentialAkashdeep BhattacharjeeAinda não há avaliações
- 25% 50% 33% 100% Solution: Efficiency of Modulation Is Given byDocumento5 páginas25% 50% 33% 100% Solution: Efficiency of Modulation Is Given byAkashdeep BhattacharjeeAinda não há avaliações
- 20.preta Loka The World of The SpiritsDocumento4 páginas20.preta Loka The World of The SpiritsAkashdeep BhattacharjeeAinda não há avaliações
- 2CSE302: Data Structures (4 0 4 6) : Learning OutcomesDocumento2 páginas2CSE302: Data Structures (4 0 4 6) : Learning OutcomesAkashdeep BhattacharjeeAinda não há avaliações
- 2CSE302: Data Structures (4 0 4 6) : Learning OutcomesDocumento2 páginas2CSE302: Data Structures (4 0 4 6) : Learning OutcomesAkashdeep BhattacharjeeAinda não há avaliações
- Fahrenhieit To CelciusDocumento1 páginaFahrenhieit To CelciusAkashdeep BhattacharjeeAinda não há avaliações
- 9702 s03 QP 2Documento16 páginas9702 s03 QP 2AjibolaAinda não há avaliações
- Geometric Design of Highways Part 3Documento7 páginasGeometric Design of Highways Part 3jun junAinda não há avaliações
- GATE Aerospace 2012 PaperDocumento5 páginasGATE Aerospace 2012 Papermohini priya kolluriAinda não há avaliações
- DVS 2205-5-1987 Calculation of Thermoplastic TanksDocumento7 páginasDVS 2205-5-1987 Calculation of Thermoplastic TanksAserty12100% (3)
- Earthquake Resistant Design of Structures PDFDocumento3 páginasEarthquake Resistant Design of Structures PDFPraveen JainAinda não há avaliações
- AirfoilDocumento8 páginasAirfoilMOFEEZALAMAinda não há avaliações
- MOM II - Module 1Documento10 páginasMOM II - Module 1Wolf LordAinda não há avaliações
- IS241 - Lecture-5 Heat EquationsDocumento39 páginasIS241 - Lecture-5 Heat EquationskibagefourjeyAinda não há avaliações
- Energy and Exergy Analysis of A Shell and Tube Heat Exchangers Having Smooth and Corrugated Inner TubesDocumento11 páginasEnergy and Exergy Analysis of A Shell and Tube Heat Exchangers Having Smooth and Corrugated Inner TubesKar AbhishekAinda não há avaliações
- Chapter 1 PDFDocumento9 páginasChapter 1 PDFB ChandAinda não há avaliações
- Acceleration: Acceleration Is The Rate of Change of VelocityDocumento8 páginasAcceleration: Acceleration Is The Rate of Change of VelocityChristian LeeAinda não há avaliações
- Egyptian Code of PracticeDocumento263 páginasEgyptian Code of PracticeyhszaAinda não há avaliações
- 2015 H2 Promo P1 EditedDocumento15 páginas2015 H2 Promo P1 EditedLim Kew ChongAinda não há avaliações
- Seismic Earth Pressures On Retaining WallsDocumento71 páginasSeismic Earth Pressures On Retaining Wallsradespino1Ainda não há avaliações
- 02 Special Topic NSCP Minimum Design Loads (Partial)Documento21 páginas02 Special Topic NSCP Minimum Design Loads (Partial)Maan LucsAinda não há avaliações
- Design of Machine Elements: Muhammad Ilyas, PHDDocumento60 páginasDesign of Machine Elements: Muhammad Ilyas, PHDumer JuttAinda não há avaliações
- BookPgs ProbDocumento5 páginasBookPgs Probmsenesi3100% (2)
- Theory of Machines-I (MAE218) - Minor Exam and SolutionDocumento33 páginasTheory of Machines-I (MAE218) - Minor Exam and SolutionRohit KaushikAinda não há avaliações
- ASTM D7078 - Shear Test of Composite MaterialDocumento4 páginasASTM D7078 - Shear Test of Composite MaterialFARUK ELALDIAinda não há avaliações
- BUOYANCY & FLOTATION - METACENTRIC HEIGHT ReportDocumento8 páginasBUOYANCY & FLOTATION - METACENTRIC HEIGHT Reportميسرة94% (18)
- Modeling, Estimation and Attitude Control of An Octorotor Using PID and L1 Adaptive Control TechniquesDocumento137 páginasModeling, Estimation and Attitude Control of An Octorotor Using PID and L1 Adaptive Control TechniquesColDfireAinda não há avaliações
- TANK Module: Sample PrintoutDocumento17 páginasTANK Module: Sample PrintoutAnonymous J1vjrU2Ainda não há avaliações
- Week 011-012 Chemical ThermodynamicsDocumento8 páginasWeek 011-012 Chemical ThermodynamicsFigh terAinda não há avaliações
- Heat Transfer CoefficientDocumento42 páginasHeat Transfer CoefficientVenkatesh RYAinda não há avaliações
- 1 - Gravitation (Theory) Short NotesDocumento12 páginas1 - Gravitation (Theory) Short NotesKartik P. SahAinda não há avaliações
- Engineering Hydrology & HydraulicsDocumento153 páginasEngineering Hydrology & HydraulicsMihirAinda não há avaliações
- (J. R. Simonson (Auth.) ) Engineering Heat Transfer (B-Ok - Xyz)Documento270 páginas(J. R. Simonson (Auth.) ) Engineering Heat Transfer (B-Ok - Xyz)sssss100% (2)
- PHY10 ReviewerDocumento4 páginasPHY10 ReviewerAngelo Montelibano PatronAinda não há avaliações
- Ok - SDB SAP2000 v14.0.0 - License # 02 February 2016Documento2 páginasOk - SDB SAP2000 v14.0.0 - License # 02 February 2016AdyZiipAinda não há avaliações
- (ABU) Reinforced Concrete I - L2 Introduction PDFDocumento29 páginas(ABU) Reinforced Concrete I - L2 Introduction PDFEmre ÖzkatAinda não há avaliações