Você também pode gostar
- LAB5 Planta Mezcladora de PinturaDocumento10 páginasLAB5 Planta Mezcladora de PinturaYereliz GuevaraAinda não há avaliações
- LAB3 SimulaciónDocumento9 páginasLAB3 SimulaciónYereliz GuevaraAinda não há avaliações
- Circuito 7408 AND TTLDocumento2 páginasCircuito 7408 AND TTLYereliz GuevaraAinda não há avaliações
- Efectos de la exposición a corriente eléctricaDocumento1 páginaEfectos de la exposición a corriente eléctricaYereliz GuevaraAinda não há avaliações
- Experiencia 40 Polaridad Del TransformadorDocumento3 páginasExperiencia 40 Polaridad Del TransformadorYereliz GuevaraAinda não há avaliações
- Voltaje y Corriente en CADocumento10 páginasVoltaje y Corriente en CAYereliz GuevaraAinda não há avaliações
- Voltaje y Corriente en CADocumento10 páginasVoltaje y Corriente en CAYereliz GuevaraAinda não há avaliações
- Calculo VectorialDocumento7 páginasCalculo VectorialKevin SotoAinda não há avaliações
- Flores de Bach y Astrologia PDFDocumento10 páginasFlores de Bach y Astrologia PDFGustavo Cruz100% (4)
- Levantamientos TaquimetricosDocumento14 páginasLevantamientos TaquimetricosCiinthyStephPeraltaAinda não há avaliações
- Plan de Respuesta A Emergencias Tecno FireDocumento22 páginasPlan de Respuesta A Emergencias Tecno Firepaty_arau777Ainda não há avaliações
- Informe 14 Arr Upcv Oscro AsDocumento12 páginasInforme 14 Arr Upcv Oscro AsRodrigo Quiroz Brantes0% (1)
- Pilas. CartelDocumento1 páginaPilas. CartelLeví GómezAinda não há avaliações
- Betún modificado con caucho de neumáticos reciclado ofrece ventajasDocumento13 páginasBetún modificado con caucho de neumáticos reciclado ofrece ventajasLeonardo Sierra TapiasAinda não há avaliações
- Informe 1 de ApaDocumento4 páginasInforme 1 de ApaxxxelyxxxAinda não há avaliações
- Prácticas 1 y 2Documento8 páginasPrácticas 1 y 2Tatiana CalderónAinda não há avaliações
- Glosario de Términos MinerosDocumento4 páginasGlosario de Términos MinerosLuis Zendo Zepeda VásquezAinda não há avaliações
- Mecánica de suelos II UNSLGC IcaDocumento23 páginasMecánica de suelos II UNSLGC Icaomar kanaAinda não há avaliações
- Prensa UniversalDocumento22 páginasPrensa UniversalJessi JgvAinda não há avaliações
- Practica 5 Jeam MMDocumento8 páginasPractica 5 Jeam MMJeampier Medina MelgarAinda não há avaliações
- ADPT Universidad control calidadDocumento5 páginasADPT Universidad control calidadDavid AguirreAinda não há avaliações
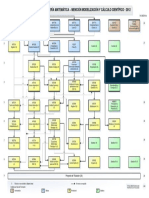
- Malla Curricular Ing Matematica Mencion Modelizacion PDFDocumento1 páginaMalla Curricular Ing Matematica Mencion Modelizacion PDFbartolome777ooAinda não há avaliações
- Geocompuestos de Drenaje Triplanar en Sistema de Subdrenaje en Vías Como ReemplazoDocumento8 páginasGeocompuestos de Drenaje Triplanar en Sistema de Subdrenaje en Vías Como ReemplazojuvermcAinda não há avaliações
- Ecuaciones e InecuacionesDocumento2 páginasEcuaciones e InecuacionesTamara Rosales Tandaipan100% (2)
- Sopa de LetrasDocumento3 páginasSopa de LetrasIvan RománAinda não há avaliações
- Muestreo Reconstruccion Control DigitalDocumento34 páginasMuestreo Reconstruccion Control DigitalelblinblinhotsauceAinda não há avaliações
- Cuestionario de Energia y PotenciaDocumento44 páginasCuestionario de Energia y Potenciaive manamasAinda não há avaliações
- Reporte 7 MétodosDocumento2 páginasReporte 7 Métodosfcbarcelona-08hotmail.comAinda não há avaliações
- Practico 3 - 2012Documento14 páginasPractico 3 - 2012sandra_muñoz_15Ainda não há avaliações
- Método de Taylor para aproximar funcionesDocumento7 páginasMétodo de Taylor para aproximar funcionesCristian AbarcaAinda não há avaliações
- Métodos de medición de temperatura optimizados paraDocumento31 páginasMétodos de medición de temperatura optimizados paraTomas Garcia MirandaAinda não há avaliações
- SILABO MADERA Mayo 2017. Julio Rojas BravoDocumento2 páginasSILABO MADERA Mayo 2017. Julio Rojas BravoMichael Julian GORVEÑA HUISAAinda não há avaliações
- Lord CastroDocumento31 páginasLord CastroJuancito perezAinda não há avaliações
- 01 Reservorio Cuadrado 5 m3 - Diseño EstructuralDocumento30 páginas01 Reservorio Cuadrado 5 m3 - Diseño EstructuralRoger Aldana100% (1)
- Nom 094 Ssa1 1994Documento18 páginasNom 094 Ssa1 1994Ramón ÁngelesAinda não há avaliações
- Angulo y Coeficiente de FriccionDocumento10 páginasAngulo y Coeficiente de FriccionEnriqueRomeroAinda não há avaliações