Você também pode gostar
- Cuevas Mena Cristian S11Documento10 páginasCuevas Mena Cristian S11Anonymous JoBckYGuUAinda não há avaliações
- Batalla de PueblaDocumento21 páginasBatalla de PueblaAnonymous JoBckYGuUAinda não há avaliações
- Trabajo de Calculo (Algebra Vectorial)Documento8 páginasTrabajo de Calculo (Algebra Vectorial)Anonymous JoBckYGuUAinda não há avaliações
- Audio DigitalDocumento2 páginasAudio DigitalAnonymous JoBckYGuUAinda não há avaliações
- Audio DigitalDocumento2 páginasAudio DigitalAnonymous JoBckYGuUAinda não há avaliações
- Ingeniería AeroespacialDocumento6 páginasIngeniería AeroespacialAnonymous JoBckYGuUAinda não há avaliações
- Medición de NivelDocumento5 páginasMedición de NivelAnonymous JoBckYGuUAinda não há avaliações
- Silabo Materiales de ContruccionDocumento3 páginasSilabo Materiales de ContruccionAlfredo Romero KanaAinda não há avaliações
- Soldadura (24-04-2020)Documento103 páginasSoldadura (24-04-2020)Johan James Hinostroza Yucra100% (1)
- Capitulo 35. Gestion de Las Estructuras Mixtas Hormigon-Acero Durante Su Vida de ServicioDocumento2 páginasCapitulo 35. Gestion de Las Estructuras Mixtas Hormigon-Acero Durante Su Vida de ServicioJ_C_RomAinda não há avaliações
- 17 - Instrucción LOOP en Step 7 - El For - Next Del PLC - Programación SIEMENS PDFDocumento2 páginas17 - Instrucción LOOP en Step 7 - El For - Next Del PLC - Programación SIEMENS PDFjubidiaiAinda não há avaliações
- Tarea NormaDocumento27 páginasTarea NormaJaime Escudero HernandezAinda não há avaliações
- Clasificados Web 1006Documento33 páginasClasificados Web 1006internetelheraldoAinda não há avaliações
- Sikaplan F 10-12 FeltDocumento2 páginasSikaplan F 10-12 FeltDavid V. BaltazarAinda não há avaliações
- Lab 8 - Flip Flop - RegistrosDocumento11 páginasLab 8 - Flip Flop - RegistrosBilly Markos Felix GutierrezAinda não há avaliações
- Documents - MX Diseno de Puentes 560702eeedab9Documento5 páginasDocuments - MX Diseno de Puentes 560702eeedab9Carmen HLópezAinda não há avaliações
- DisenoSismico2 PRMDocumento49 páginasDisenoSismico2 PRMViviana RamirezAinda não há avaliações
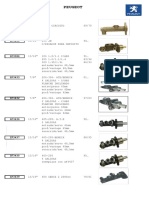
- PeugeotDocumento30 páginasPeugeotאליהו אסתי אנדרדAinda não há avaliações
- Marco Teorico Informe 2 Lab SuelosDocumento2 páginasMarco Teorico Informe 2 Lab Suelosomar anthonyAinda não há avaliações
- Unidad 01 - 01 - AsfaltoDocumento141 páginasUnidad 01 - 01 - AsfaltoMarco Ramos RaimondiAinda não há avaliações
- Hispana - CDU - 60Hz 2023Documento100 páginasHispana - CDU - 60Hz 2023Robert Navidad CorreaAinda não há avaliações
- Coeficiente de Convección o PelicularDocumento5 páginasCoeficiente de Convección o PelicularAdoBrodAinda não há avaliações
- Presentacion Curso Operación de Trenes Con PD LBDocumento84 páginasPresentacion Curso Operación de Trenes Con PD LBAlcides R Sanchez Aponte100% (1)
- Maquinarías EspecialesDocumento4 páginasMaquinarías EspecialesEdgar Raul Machaca MaytaAinda não há avaliações
- Ensayos de Campo para Determinar Propiedades Del SueloDocumento4 páginasEnsayos de Campo para Determinar Propiedades Del Suelocrema2000Ainda não há avaliações
- 112243Documento154 páginas112243ruben ordoñezAinda não há avaliações
- Elisa Duarte CuadroComparativo Actividad.1.1Documento2 páginasElisa Duarte CuadroComparativo Actividad.1.1elisa duarte100% (1)
- Tesis Diseño Planta BiodieselDocumento157 páginasTesis Diseño Planta BiodieselVenecia De la TierraverdeazuladaAinda não há avaliações
- CogeneracionDocumento32 páginasCogeneracionpedrofv50% (4)
- Especificacion Tecnica de Pozo A TierraDocumento2 páginasEspecificacion Tecnica de Pozo A TierraNico CAYOAinda não há avaliações
- Resumen Fundamentos de ColorDocumento5 páginasResumen Fundamentos de ColorzuvelzazAinda não há avaliações
- Anastilosis - Natalia Huratdo Montano.Documento29 páginasAnastilosis - Natalia Huratdo Montano.Natalia MontanoAinda não há avaliações
- Informe N° 1 TopografiaDocumento17 páginasInforme N° 1 TopografiaJhoel ChavezAinda não há avaliações
- Lab.3 Bomba CentrifugaDocumento25 páginasLab.3 Bomba Centrifugahagi andres carrilloAinda não há avaliações
- Ensayos Eléctricos en Baja Tensión 1Documento49 páginasEnsayos Eléctricos en Baja Tensión 1Paul CruzAinda não há avaliações
- Cuestionarios Final 2.0Documento98 páginasCuestionarios Final 2.0Javier Nicolas Quintanilla FloresAinda não há avaliações
- Leyes Informaticas Todas PDFDocumento38 páginasLeyes Informaticas Todas PDFAlfredo JoseAinda não há avaliações