Você também pode gostar
- Knowledge is "Real Power": Introduction to Power QualityNo EverandKnowledge is "Real Power": Introduction to Power QualityAinda não há avaliações
- Temperature Rise HV MotorDocumento11 páginasTemperature Rise HV Motorashwani2101Ainda não há avaliações
- Gipam2200 Catalog e 0802Documento36 páginasGipam2200 Catalog e 0802Tu CongVanAinda não há avaliações
- 6065 10Documento36 páginas6065 10Alex Barzola VelardeAinda não há avaliações
- Extracto IEEE C37 99 Cond ExtDocumento1 páginaExtracto IEEE C37 99 Cond ExtPablo Poveda Rodriguez0% (1)
- Results: Installation Type: Buried DuctsDocumento10 páginasResults: Installation Type: Buried Ductsgari_monsantoAinda não há avaliações
- CORONA ch5Documento14 páginasCORONA ch5yaredAinda não há avaliações
- REF610 PG 756295 ENb PDFDocumento24 páginasREF610 PG 756295 ENb PDFJesus Ricardo Arzapalo GamarraAinda não há avaliações
- Giza Systems Ss Zigzag Calculation Xls SheetDocumento1 páginaGiza Systems Ss Zigzag Calculation Xls SheetMohamed ShafeyAinda não há avaliações
- IntelliRupter PulseCloserDocumento24 páginasIntelliRupter PulseCloserThai TranAinda não há avaliações
- A Theoretical Model For Corrosion Assessment in Overhead Line ConductorsDocumento6 páginasA Theoretical Model For Corrosion Assessment in Overhead Line Conductorsdeathjester1Ainda não há avaliações
- Air Core ReactorDocumento4 páginasAir Core ReactorBilal AhmadAinda não há avaliações
- Grounding & Ground Fault Protection of Multiple Generator InstallationsDocumento22 páginasGrounding & Ground Fault Protection of Multiple Generator InstallationssparkCE100% (1)
- RigidBusbarDesign Paper vsIEEEDocumento13 páginasRigidBusbarDesign Paper vsIEEEwaqarAinda não há avaliações
- Power Network Protection and Automation GuideDocumento152 páginasPower Network Protection and Automation GuidegirishvAinda não há avaliações
- Completely Self Protected Distribution (CSP) TransformersDocumento11 páginasCompletely Self Protected Distribution (CSP) Transformersjobpei2Ainda não há avaliações
- Ics 2 Part 8 Industrial Control and Systems Controllers, Contactors, and Overload Relays Rated Not More Than 2000 Volts Ac or 750 Volts DCDocumento13 páginasIcs 2 Part 8 Industrial Control and Systems Controllers, Contactors, and Overload Relays Rated Not More Than 2000 Volts Ac or 750 Volts DCSureshKumarAinda não há avaliações
- A Survey of Cold Load Pickup PracticesDocumento26 páginasA Survey of Cold Load Pickup PracticestunghtdAinda não há avaliações
- Amted399086en (Web)Documento180 páginasAmted399086en (Web)aleksandaralAinda não há avaliações
- 7.21 Outdoor Bus StructuresDocumento191 páginas7.21 Outdoor Bus StructuresEdyta MarzecAinda não há avaliações
- Understanding The Neher-McGrath Calculation and The Ampacity of ConductorsDocumento7 páginasUnderstanding The Neher-McGrath Calculation and The Ampacity of ConductorsbhaskarinvuAinda não há avaliações
- D04 BuscouplerDocumento65 páginasD04 BuscouplerபாரதிAinda não há avaliações
- Snubbers:: Protecting Medium-Voltage Transformers From Electrical TransientsDocumento4 páginasSnubbers:: Protecting Medium-Voltage Transformers From Electrical TransientsANTONIO SOLISAinda não há avaliações
- Ieeeiec Measuring Relays and Protection Equipment Part 24 Common 2013Documento73 páginasIeeeiec Measuring Relays and Protection Equipment Part 24 Common 2013Andrés Felipe Cárdenas CárdenasAinda não há avaliações
- Rees DfigDocumento50 páginasRees DfigSoham KaryakarteAinda não há avaliações
- Sobretensiones y Coordinacione de AislamientoDocumento280 páginasSobretensiones y Coordinacione de AislamientomartinpellsAinda não há avaliações
- 5-Characteristic Cable Impedance-DigibridgeDocumento3 páginas5-Characteristic Cable Impedance-DigibridgealmonimeAinda não há avaliações
- IEEE c37-90-2-1995-Capability-Capability-of-Relay-Systems-to-Radi PDFDocumento14 páginasIEEE c37-90-2-1995-Capability-Capability-of-Relay-Systems-to-Radi PDFCesar Machado0% (1)
- Analysis of Zig-Zag Transformer Applying in The Three-Phase Four-Wire Distribution Power SystemDocumento6 páginasAnalysis of Zig-Zag Transformer Applying in The Three-Phase Four-Wire Distribution Power SystemHESHAM_ELREFAIEAinda não há avaliações
- AFL Substation Bus DampersDocumento12 páginasAFL Substation Bus Dampersabhi120783Ainda não há avaliações
- L-Tri 5 ArevaDocumento48 páginasL-Tri 5 ArevaFernando Tamayo100% (2)
- Arnold 1941Documento11 páginasArnold 1941Gino SuárezAinda não há avaliações
- PILC Cable Data Sheet PDFDocumento2 páginasPILC Cable Data Sheet PDFbiglee82Ainda não há avaliações
- Calculation of Current-Carrying Capacity of Overhead Power Transmission Lines in Different Weather Conditions. 2017Documento5 páginasCalculation of Current-Carrying Capacity of Overhead Power Transmission Lines in Different Weather Conditions. 2017GhhAinda não há avaliações
- The Technology of Instrument Transformers: Current and Voltage Measurement and Insulation SystemsNo EverandThe Technology of Instrument Transformers: Current and Voltage Measurement and Insulation SystemsAinda não há avaliações
- (1981) - Single Phase Switching Tests On The AEP 765 KVDocumento7 páginas(1981) - Single Phase Switching Tests On The AEP 765 KVluan balbinoAinda não há avaliações
- 1377 1997Documento201 páginas1377 1997Ann DodsonAinda não há avaliações
- Loss Evaluation of HVAC and HVDC Transmission Solutions For Large Offshore Wind FarmsDocumento11 páginasLoss Evaluation of HVAC and HVDC Transmission Solutions For Large Offshore Wind Farmsmohon_eee03100% (2)
- CYMGRD 6.3 For Windows: User'S Guide and Reference ManualDocumento141 páginasCYMGRD 6.3 For Windows: User'S Guide and Reference ManualJhon100% (1)
- Study On The Electromagnetic Force Affected by Short CircuitDocumento5 páginasStudy On The Electromagnetic Force Affected by Short CircuitShrihari J100% (1)
- Lightning ParametersDocumento13 páginasLightning ParametersJorge Alberto Ayala SanchezAinda não há avaliações
- Aluminium AW 6101A T6 Busbar FlatDocumento3 páginasAluminium AW 6101A T6 Busbar Flatdoshi78Ainda não há avaliações
- CYMGRD Wind Turbine Grounding PDFDocumento4 páginasCYMGRD Wind Turbine Grounding PDFjaneth lozanoAinda não há avaliações
- AAAC 6201 Type A3 IEC61089Documento1 páginaAAAC 6201 Type A3 IEC61089Proteksitrans1 p3bsAinda não há avaliações
- Pirelli PDFDocumento24 páginasPirelli PDFFarhan ShahAinda não há avaliações
- LS Catalogue HCCDocumento10 páginasLS Catalogue HCCVICTOR JOSE VILORIAAinda não há avaliações
- UL Bulletin On Electrical Connections PDFDocumento2 páginasUL Bulletin On Electrical Connections PDFbhaskarinvuAinda não há avaliações
- Sol Sdm02 SK Pe Ele FD 061 r01Documento9 páginasSol Sdm02 SK Pe Ele FD 061 r012D EngenhariaAinda não há avaliações
- Etap ZcociDocumento7 páginasEtap ZcociJorgeLabraCanalesAinda não há avaliações
- NEMA Standards Publication ICS 20-2009 (R2015) : Informational Guide To Electrical Industrial TopicsDocumento34 páginasNEMA Standards Publication ICS 20-2009 (R2015) : Informational Guide To Electrical Industrial Topicsrize1159Ainda não há avaliações
- V.N PJM Design & Application of Insulation Coordination and Surge ProtectionDocumento3 páginasV.N PJM Design & Application of Insulation Coordination and Surge Protectionbkalatus1Ainda não há avaliações
- MV Air Insultated Switchgear Technical Guide 1VAL1002-TG Rev A PDFDocumento188 páginasMV Air Insultated Switchgear Technical Guide 1VAL1002-TG Rev A PDFRobinson GuerreroAinda não há avaliações
- Astm D4059Documento2 páginasAstm D4059septhiadi100% (1)
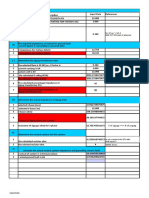
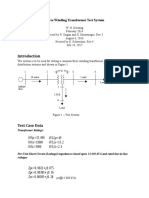
- Three Winding Transformer Test System-EPRI-2017-Rev4Documento18 páginasThree Winding Transformer Test System-EPRI-2017-Rev4Jorge TorresAinda não há avaliações
- Introduction of Electric Power SystemDocumento17 páginasIntroduction of Electric Power SystemsohaibAinda não há avaliações
- IEEE STD C37.20.2b-1994 Suplemento PDFDocumento3 páginasIEEE STD C37.20.2b-1994 Suplemento PDFDaniel Gonzalez LucianiAinda não há avaliações
- Shunt Reactor 0420101Documento16 páginasShunt Reactor 0420101emy1188Ainda não há avaliações
- Ansi C92.1 (1982)Documento16 páginasAnsi C92.1 (1982)juanita sanchez buitragoAinda não há avaliações
- Bus Cond CatalogDocumento28 páginasBus Cond CatalogJorge MoralesAinda não há avaliações
- Recommended Setting For EF Protection PDFDocumento1 páginaRecommended Setting For EF Protection PDFRoberto SuAinda não há avaliações
- Application ManualDocumento918 páginasApplication ManualRus ClaudiuAinda não há avaliações
- P3U en M F005 ANSI Web PDFDocumento364 páginasP3U en M F005 ANSI Web PDFRoberto Su100% (1)
- P3F30 en M G006 IEC Web PDFDocumento456 páginasP3F30 en M G006 IEC Web PDFКонстантин ГригорьевAinda não há avaliações
- Transformer Snubbers White Paper - 8 - 2 - 16Documento8 páginasTransformer Snubbers White Paper - 8 - 2 - 16Roberto SuAinda não há avaliações
- CB Abb LTB PDFDocumento42 páginasCB Abb LTB PDFwiznuvAinda não há avaliações
- 845ref Ac 270 PDFDocumento586 páginas845ref Ac 270 PDFRoberto SuAinda não há avaliações
- Is B Series Family 1500vdcDocumento4 páginasIs B Series Family 1500vdcRoberto SuAinda não há avaliações
- Technical Guide No 6 3AFE64292714 RevF enDocumento32 páginasTechnical Guide No 6 3AFE64292714 RevF enИНВЕРТКОМ ОООAinda não há avaliações
- Ferro Resonance in CVTDocumento30 páginasFerro Resonance in CVTKrishna Venkataraman100% (2)
- Transformer Condition MonitoringDocumento20 páginasTransformer Condition MonitoringRoberto SuAinda não há avaliações
- Disjuntor SiemenesDocumento15 páginasDisjuntor SiemenesDaviMiattelloRFAinda não há avaliações
- K-Factor and Transformer Losses Calculations Under HarmonicsDocumento6 páginasK-Factor and Transformer Losses Calculations Under HarmonicsRoberto SuAinda não há avaliações
- Origin, Pment, and Design: DeveiDocumento3 páginasOrigin, Pment, and Design: DeveiRoberto SuAinda não há avaliações
- Study of Very Fast Transient Overvoltages and Mitigation Techniques of A Gas Insulated SubstationDocumento6 páginasStudy of Very Fast Transient Overvoltages and Mitigation Techniques of A Gas Insulated SubstationThyago De Moura JorgeAinda não há avaliações
- Estimating The Size of Ferrite For Suppressing VFTO in GIS: Yuanbing2 Ge2Documento4 páginasEstimating The Size of Ferrite For Suppressing VFTO in GIS: Yuanbing2 Ge2Roberto SuAinda não há avaliações
- A Novel Arc Model For Very Fast Transient Overvoltage Simulation in A 252-kV Gas-Insulated SwitchgearDocumento7 páginasA Novel Arc Model For Very Fast Transient Overvoltage Simulation in A 252-kV Gas-Insulated SwitchgearRoberto SuAinda não há avaliações
- Study On VFTO in UHV GIS SubstationDocumento4 páginasStudy On VFTO in UHV GIS SubstationRoberto SuAinda não há avaliações
- Bamne2018 PDFDocumento5 páginasBamne2018 PDFRoberto SuAinda não há avaliações
- Ijsrp p15121 PDFDocumento14 páginasIjsrp p15121 PDFRoberto SuAinda não há avaliações
- Bamne2018 PDFDocumento5 páginasBamne2018 PDFRoberto SuAinda não há avaliações
- Computation of Very Fast Transient Overvoltages (VFTO) in A 1000 KV Gas Insulated SubstationDocumento6 páginasComputation of Very Fast Transient Overvoltages (VFTO) in A 1000 KV Gas Insulated SubstationRoberto SuAinda não há avaliações
- Estimating The Size of Ferrite For Suppressing VFTO in GIS: Yuanbing2 Ge2Documento4 páginasEstimating The Size of Ferrite For Suppressing VFTO in GIS: Yuanbing2 Ge2Roberto SuAinda não há avaliações
- Transactions On Energy Conversion, Vol. September: (4) PresentedDocumento7 páginasTransactions On Energy Conversion, Vol. September: (4) PresentedRoberto SuAinda não há avaliações
- Design of A High-Speed Motor Bus Transfer System: Murty V. V. S. Yalla, Fellow, IEEEDocumento8 páginasDesign of A High-Speed Motor Bus Transfer System: Murty V. V. S. Yalla, Fellow, IEEERoberto SuAinda não há avaliações
- Research The Effect of UHV GIS Disconnector Contact Shape On The Multi-RestrikeDocumento4 páginasResearch The Effect of UHV GIS Disconnector Contact Shape On The Multi-RestrikeRoberto SuAinda não há avaliações
- Shipp2008 PDFDocumento9 páginasShipp2008 PDFRoberto SuAinda não há avaliações
- Normal Power Supply System of A Nuclear Power Plant - Modelling and Simulation Studies For Fast Bus TransferDocumento6 páginasNormal Power Supply System of A Nuclear Power Plant - Modelling and Simulation Studies For Fast Bus TransferRoberto SuAinda não há avaliações
- Normal Power Supply System of A Nuclear Power Plant - Modelling and Simulation Studies For Fast Bus TransferDocumento6 páginasNormal Power Supply System of A Nuclear Power Plant - Modelling and Simulation Studies For Fast Bus TransferRoberto SuAinda não há avaliações
- Induction Motor Parameter Estimation Algorithm Using Spectral AnalysisDocumento10 páginasInduction Motor Parameter Estimation Algorithm Using Spectral AnalysisRoberto SuAinda não há avaliações
- Sigrity Flextronics Power Integrity System Design CPDocumento26 páginasSigrity Flextronics Power Integrity System Design CPDURGASI JYOTHIAinda não há avaliações
- Sector Bending Blurring Lines Between Non-Profit and For-ProfitDocumento13 páginasSector Bending Blurring Lines Between Non-Profit and For-ProfitKevAinda não há avaliações
- Bangui Wind FarmDocumento5 páginasBangui Wind FarmChristopher YsitAinda não há avaliações
- 21 FullPaper Design and Fabrication of An Adlai Milling Machine Version 2Documento75 páginas21 FullPaper Design and Fabrication of An Adlai Milling Machine Version 2loureniel de jesus100% (1)
- Report WISHDocumento51 páginasReport WISHNss Aissms Coe PuneAinda não há avaliações
- AP Chemistry 1994 Free ResponseDocumento5 páginasAP Chemistry 1994 Free ResponseWes BristleconeAinda não há avaliações
- Vaporizador 120 GPH InglesDocumento54 páginasVaporizador 120 GPH InglesvictorlizcanoAinda não há avaliações
- Lesson 5 Packed Tower ScrubbersDocumento20 páginasLesson 5 Packed Tower ScrubbersinsomniaticstatAinda não há avaliações
- PT7Documento2 páginasPT7Anonymous j5apk2AumAinda não há avaliações
- Planning and Design of SewageDocumento23 páginasPlanning and Design of SewageBenedicte Aimee JohansenAinda não há avaliações
- B20ME067 SeminarDocumento14 páginasB20ME067 SeminarSanjay 69ffAinda não há avaliações
- Pages From PU BRI 23 018 Auto Transformer IR001 (093) DraftDocumento2 páginasPages From PU BRI 23 018 Auto Transformer IR001 (093) DraftumairAinda não há avaliações
- Sandvik DU311 ITH - Descripción Técnica - EnglishDocumento4 páginasSandvik DU311 ITH - Descripción Técnica - EnglishErix Alcayaga GonzálezAinda não há avaliações
- Solutions To The Problems of The Theoretical CompetitionDocumento16 páginasSolutions To The Problems of The Theoretical CompetitionDejan DjokićAinda não há avaliações
- Turbine Operation and Maintenance ManualDocumento31 páginasTurbine Operation and Maintenance ManualTaufik TajudinAinda não há avaliações
- List of Ports Covered in PPA Statistics PDFDocumento22 páginasList of Ports Covered in PPA Statistics PDFPlanet Kaizen100% (1)
- Us 3871298Documento13 páginasUs 3871298Phúc DuyAinda não há avaliações
- 01-KPDS 1992 MayisDocumento16 páginas01-KPDS 1992 MayishusebukeAinda não há avaliações
- Electrodo de Ignicion Westwood 50Documento120 páginasElectrodo de Ignicion Westwood 50RichardAinda não há avaliações
- ChE ThermodynamicsDocumento49 páginasChE ThermodynamicsMiguel FelisildaAinda não há avaliações
- Refrigerator RG90Documento11 páginasRefrigerator RG90Manuel HernandezAinda não há avaliações
- EML2322L-Drilling and Milling Speeds and FeedsDocumento9 páginasEML2322L-Drilling and Milling Speeds and Feedsjromero_rpgAinda não há avaliações
- External Dimensions and Piping Details: PX Pressure Exchanger Energy Recovery DeviceDocumento2 páginasExternal Dimensions and Piping Details: PX Pressure Exchanger Energy Recovery Deviceprasad5034Ainda não há avaliações
- Basic Science BASIC 8Documento2 páginasBasic Science BASIC 8Alexander ChristAinda não há avaliações
- Osmium - Os: Chemical Properties of Osmium Health Effects of Osmium Environmental Effects of OsmiumDocumento15 páginasOsmium - Os: Chemical Properties of Osmium Health Effects of Osmium Environmental Effects of Osmiumshoaibansari641Ainda não há avaliações
- Bergenb 3240 Propulsion EngineDocumento2 páginasBergenb 3240 Propulsion Enginefahmi wibowoAinda não há avaliações
- Plant Structure and Function PDFDocumento2 páginasPlant Structure and Function PDFPT.Susan Angwyn Gemilang 8Ainda não há avaliações
- 5070 s03 QP 1 PDFDocumento16 páginas5070 s03 QP 1 PDFAnonymous wFLGHQ6ARAinda não há avaliações
- Alstom China ProdutosDocumento43 páginasAlstom China ProdutoscolimecAinda não há avaliações
- Fuel Less GRNTRDocumento4 páginasFuel Less GRNTRKamran ImtiyazAinda não há avaliações