Você também pode gostar
- Todo en 1 CT1Documento82 páginasTodo en 1 CT1Erick Orlando Portillo MartínezAinda não há avaliações
- Uml Diagrams-Bank ManagementDocumento30 páginasUml Diagrams-Bank Managementshakir54490% (70)
- ALEOS 4.14.0 Software Configuration User Guide For AirLink LX60 - r2Documento585 páginasALEOS 4.14.0 Software Configuration User Guide For AirLink LX60 - r2nguyen nguyenAinda não há avaliações
- ISC Capstone Network Design ProposalDocumento24 páginasISC Capstone Network Design Proposalhomenetwork100% (2)
- Cs6551 Computer Networks: Unit - IiDocumento86 páginasCs6551 Computer Networks: Unit - IiP.Veera LakshmiAinda não há avaliações
- Wired Lans: 1. IEEE Project 802Documento18 páginasWired Lans: 1. IEEE Project 802sarala deviAinda não há avaliações
- Unit 2 UpDocumento18 páginasUnit 2 UpManju LaAinda não há avaliações
- Lecture 15.1 - Ethernet: Delivered by Joel Anandraj.E Ap/ItDocumento47 páginasLecture 15.1 - Ethernet: Delivered by Joel Anandraj.E Ap/ItMithun Santhosh YuvarajanAinda não há avaliações
- Ethernet NetworkingDocumento5 páginasEthernet NetworkingEfti ChowdhuryAinda não há avaliações
- Ethernet Is The Name Given To A Popular Packet-Switched LAN Technology InventedDocumento6 páginasEthernet Is The Name Given To A Popular Packet-Switched LAN Technology InventedjyothisAinda não há avaliações
- Ethernet Technology: Ethernet), Supports Data Transfer Rates of 100 MbpsDocumento27 páginasEthernet Technology: Ethernet), Supports Data Transfer Rates of 100 MbpsAnita Sofia VAinda não há avaliações
- Wired Lans and Ethernet: 01204325: Data Communication and Computer NetworksDocumento53 páginasWired Lans and Ethernet: 01204325: Data Communication and Computer NetworksshaniraAinda não há avaliações
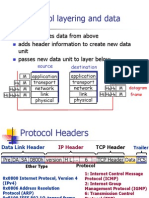
- Protocol layering and data transmissionDocumento28 páginasProtocol layering and data transmissionsalman hussainAinda não há avaliações
- Protocol Layering and DataDocumento19 páginasProtocol Layering and DataAleena KanwalAinda não há avaliações
- Physical and Data Link Layers (1 & 2) : Ethernet (Network Interfce Card)Documento50 páginasPhysical and Data Link Layers (1 & 2) : Ethernet (Network Interfce Card)Manesh KurupAinda não há avaliações
- 4b Ethernet - Medium Access Control SublayerDocumento61 páginas4b Ethernet - Medium Access Control SublayerThamizh VendhanAinda não há avaliações
- CSP Unit 3Documento28 páginasCSP Unit 3m.revathiAinda não há avaliações
- 5 EthernetDocumento40 páginas5 EthernetSourava Kumar BeheraAinda não há avaliações
- Data Communications: LAN TechnologyDocumento39 páginasData Communications: LAN TechnologyAhmed FadulAinda não há avaliações
- Network Topology: Bus Ring Star FddiDocumento14 páginasNetwork Topology: Bus Ring Star FddiJean-Claude Bruce LeeAinda não há avaliações
- Ethernet: Fast Ethernet Gigabit EthernetDocumento47 páginasEthernet: Fast Ethernet Gigabit EthernetHadi HamaAinda não há avaliações
- Lecture 6Documento34 páginasLecture 6Aeman AkramAinda não há avaliações
- LAN Access Control MethodsDocumento31 páginasLAN Access Control MethodsturiagabaAinda não há avaliações
- L4 Networking Newps401: Switching LU3. Describe Basic Switching Concepts and ConfigurationDocumento23 páginasL4 Networking Newps401: Switching LU3. Describe Basic Switching Concepts and ConfigurationIhirwe Shidy MegnyAinda não há avaliações
- Ethernet and Switches (Computer Network)Documento31 páginasEthernet and Switches (Computer Network)Vikalp PanseriyaAinda não há avaliações
- Protocol Layering and DataDocumento20 páginasProtocol Layering and DataAli AhmadAinda não há avaliações
- Computer Networks Assignment No. 02: Ponraj. P Iii Bca C 0822JC32 02.08.2010Documento24 páginasComputer Networks Assignment No. 02: Ponraj. P Iii Bca C 0822JC32 02.08.2010scribleAinda não há avaliações
- Introduction To Ethernet TechnologyDocumento47 páginasIntroduction To Ethernet TechnologySABIR HUSSAIN100% (1)
- To Identify Where The Frame Starts and Ends To Distinguish Data Bits From Control BitsDocumento6 páginasTo Identify Where The Frame Starts and Ends To Distinguish Data Bits From Control BitsLeonardo Alberto Conde TorresAinda não há avaliações
- Data Link Layer (Ethernet)Documento37 páginasData Link Layer (Ethernet)Yash TamakuwalaAinda não há avaliações
- Ethernet: An Introduction: Fast Ethernet Operates 10 Times Faster, I.e., at 100 Mbps. Recently, There HasDocumento4 páginasEthernet: An Introduction: Fast Ethernet Operates 10 Times Faster, I.e., at 100 Mbps. Recently, There Hasaksagar22Ainda não há avaliações
- General Fill in The Blanks' Questions (: May Have Some Duplicates)Documento4 páginasGeneral Fill in The Blanks' Questions (: May Have Some Duplicates)Larry Et AlAinda não há avaliações
- Computer Communication & Networks: Datalink Layer: Local Area NetworkDocumento21 páginasComputer Communication & Networks: Datalink Layer: Local Area NetworkAli AhmadAinda não há avaliações
- Lecture 04Documento27 páginasLecture 04api-3701823Ainda não há avaliações
- Network+ Important StuffDocumento19 páginasNetwork+ Important StuffribsterAinda não há avaliações
- Cn-Unit Ii-NotesDocumento42 páginasCn-Unit Ii-NotesRobin RobinAinda não há avaliações
- Data Communication and Network FundamentalsDocumento12 páginasData Communication and Network Fundamentalskeshav sainiAinda não há avaliações
- Troubleshoot Ethernet IssuesDocumento11 páginasTroubleshoot Ethernet Issuesmrigank shekhar100% (1)
- 5 EthernetDocumento3 páginas5 EthernetAbhay RastogiAinda não há avaliações
- Ethernet Frame FormatDocumento24 páginasEthernet Frame FormatKaushik KumarAinda não há avaliações
- By - Megha Thirki Aditya Sy BSC ItDocumento30 páginasBy - Megha Thirki Aditya Sy BSC Itmegha thirkiAinda não há avaliações
- Ethernet MainDocumento21 páginasEthernet Mainashish_patwalAinda não há avaliações
- LAN TechnologiesDocumento26 páginasLAN TechnologiesrabiAinda não há avaliações
- Ethernet (802.3) : Sep. 16. 2005 CS 440 Lecture Notes 1Documento14 páginasEthernet (802.3) : Sep. 16. 2005 CS 440 Lecture Notes 1james smithAinda não há avaliações
- Transmission Media & Networking Components: Electrical Engineering DepartmentDocumento11 páginasTransmission Media & Networking Components: Electrical Engineering DepartmentHazel Ann ManlapazAinda não há avaliações
- Course Contents: Data Communications Grade Prof. Dr. Hassan H. Soliman Dr. Mostafa Elgayar Part 4 P1Documento19 páginasCourse Contents: Data Communications Grade Prof. Dr. Hassan H. Soliman Dr. Mostafa Elgayar Part 4 P1saher waleedAinda não há avaliações
- Ce3716 Computer Networks 5Documento21 páginasCe3716 Computer Networks 5jake dossryAinda não há avaliações
- Ethernet: Fast Ethernet Gigabit EthernetDocumento47 páginasEthernet: Fast Ethernet Gigabit EthernetPonvel MuruganAinda não há avaliações
- Module 1-2 TakenotesDocumento9 páginasModule 1-2 TakenotesAries VenturaAinda não há avaliações
- Unit 2 Topic 11-12 IEEE 802.3,802.4,802.5Documento68 páginasUnit 2 Topic 11-12 IEEE 802.3,802.4,802.5ashok_it87Ainda não há avaliações
- Unit1-EEE Computer Networks - EthetnetDocumento39 páginasUnit1-EEE Computer Networks - EthetnetPandiyanAinda não há avaliações
- Internetworking Devices: Cables Repeaters Hubs Bridges Switches RoutersDocumento13 páginasInternetworking Devices: Cables Repeaters Hubs Bridges Switches RoutersPrashanth PrashuAinda não há avaliações
- IEEE Standards and EthernetDocumento5 páginasIEEE Standards and EthernetArthi Annamalla100% (1)
- Local Area Networks (LAN)Documento50 páginasLocal Area Networks (LAN)Battala Vamshi KrishnaAinda não há avaliações
- Optical Networking and Multiplexing StandardsDocumento10 páginasOptical Networking and Multiplexing StandardsSmit prajapatiAinda não há avaliações
- Ethernet: Subtopic Chapter 2Documento38 páginasEthernet: Subtopic Chapter 2Syed MohammadAinda não há avaliações
- Carrier Sensing Multiple Acces Collision DetectionDocumento9 páginasCarrier Sensing Multiple Acces Collision DetectionShikha SharmaAinda não há avaliações
- Networks NotesDocumento5 páginasNetworks NotesSukhwinderAinda não há avaliações
- Module - 2 - Medium Access - Part-2Documento40 páginasModule - 2 - Medium Access - Part-2Sangeetha B SAinda não há avaliações
- Eth 100Documento7 páginasEth 100SarzaminKhanAinda não há avaliações
- CCNA Interview Questions You'll Most Likely Be Asked: Job Interview Questions SeriesNo EverandCCNA Interview Questions You'll Most Likely Be Asked: Job Interview Questions SeriesAinda não há avaliações
- Computer Networking: An introductory guide for complete beginners: Computer Networking, #1No EverandComputer Networking: An introductory guide for complete beginners: Computer Networking, #1Nota: 4.5 de 5 estrelas4.5/5 (2)
- 1 6 C S 7 2 0 3 M O B I L E Computing: Regulation-2016, Vii SemesterDocumento17 páginas1 6 C S 7 2 0 3 M O B I L E Computing: Regulation-2016, Vii SemesterRevathimuthusamyAinda não há avaliações
- MAC ProtocolsDocumento13 páginasMAC ProtocolsRevathimuthusamyAinda não há avaliações
- HICET - Department of Computer Science and EngineeringDocumento1 páginaHICET - Department of Computer Science and EngineeringRevathimuthusamyAinda não há avaliações
- HICET - Mobile Computing CourseDocumento1 páginaHICET - Mobile Computing CourseRevathimuthusamyAinda não há avaliações
- GE6757 TQM IntroductionDocumento30 páginasGE6757 TQM IntroductionRevathimuthusamyAinda não há avaliações
- Ooad April May 2016 PDFDocumento2 páginasOoad April May 2016 PDFRevathimuthusamyAinda não há avaliações
- Subject Code and name:16CP2201 /research Methodology Question BankDocumento7 páginasSubject Code and name:16CP2201 /research Methodology Question BankRevathimuthusamyAinda não há avaliações
- Subject Code and name:16CP2201 /research Methodology Question BankDocumento7 páginasSubject Code and name:16CP2201 /research Methodology Question BankRevathimuthusamyAinda não há avaliações
- Singly Linked List Program in CDocumento12 páginasSingly Linked List Program in CRevathimuthusamyAinda não há avaliações
- HICET - Department of Computer Science and EngineeringDocumento1 páginaHICET - Department of Computer Science and EngineeringRevathimuthusamyAinda não há avaliações
- Unit I Software Process and Project Management: Hindusthan College of Engineering and TechnologyDocumento1 páginaUnit I Software Process and Project Management: Hindusthan College of Engineering and TechnologyRevathimuthusamyAinda não há avaliações
- Unit Ii Requirements Analysis and Specification: Hindusthan College of Engineering and TechnologyDocumento2 páginasUnit Ii Requirements Analysis and Specification: Hindusthan College of Engineering and TechnologyRevathimuthusamyAinda não há avaliações
- Ip Lab Program 1Documento4 páginasIp Lab Program 1RevathimuthusamyAinda não há avaliações
- Kpit Sparkle 2016Documento2 páginasKpit Sparkle 2016RevathimuthusamyAinda não há avaliações
- CS6601-Distributed Systems Two Marks Question BankDocumento8 páginasCS6601-Distributed Systems Two Marks Question BankRevathimuthusamyAinda não há avaliações
- CS6303 Computer Architecture Regulation 2013 Q & BDocumento6 páginasCS6303 Computer Architecture Regulation 2013 Q & BRevathimuthusamyAinda não há avaliações
- Big Data Brochure PDFDocumento2 páginasBig Data Brochure PDFRevathimuthusamyAinda não há avaliações
- Ooad April May 2016Documento2 páginasOoad April May 2016RevathimuthusamyAinda não há avaliações
- Presentation 1-CloudDocumento31 páginasPresentation 1-CloudRevathimuthusamyAinda não há avaliações
- Sl. No. Topic(s) Unit No - of Hours Require D Books Remarks Unit I-Data WarehousingDocumento2 páginasSl. No. Topic(s) Unit No - of Hours Require D Books Remarks Unit I-Data WarehousingRevathimuthusamyAinda não há avaliações
- Data and Transaction Control Language CommandsDocumento1 páginaData and Transaction Control Language CommandsRevathimuthusamyAinda não há avaliações
- UDP Echo ProgramDocumento2 páginasUDP Echo ProgramRevathimuthusamyAinda não há avaliações
- Nested Queries and Join QueriesDocumento6 páginasNested Queries and Join QueriesRevathimuthusamy100% (1)
- CS2402 MOBILE Log Book SylDocumento1 páginaCS2402 MOBILE Log Book SylRevathimuthusamyAinda não há avaliações
- Oss Un IDocumento40 páginasOss Un IRevathimuthusamyAinda não há avaliações
- 080230069cloud Computing Log Book SyllabusDocumento1 página080230069cloud Computing Log Book SyllabusRevathimuthusamyAinda não há avaliações
- Lesson Plan: Subject Code: CS2307 Subject Name: Networks Lab Name of Faculty: Designation: Class / SemesterDocumento2 páginasLesson Plan: Subject Code: CS2307 Subject Name: Networks Lab Name of Faculty: Designation: Class / SemesterRevathimuthusamyAinda não há avaliações
- CSEDocumento6 páginasCSEstaalinAinda não há avaliações
- Can ProtocolDocumento4 páginasCan ProtocolratheeshbrAinda não há avaliações
- Configure IEEE 802.1X Port AuthenticationDocumento72 páginasConfigure IEEE 802.1X Port Authenticationdafa13Ainda não há avaliações
- Programmable GSM/GPRS Quad Band Terminal with I/O's and RS232 portDocumento2 páginasProgrammable GSM/GPRS Quad Band Terminal with I/O's and RS232 portRelu123Ainda não há avaliações
- DIP5000 Inter Trip Relay ArevaDocumento4 páginasDIP5000 Inter Trip Relay ArevaHytham HailAinda não há avaliações
- HP Big PictureDocumento2 páginasHP Big PictureTrung BjAinda não há avaliações
- LTRT-22018 MP-202 - MP-26x and MP-27x Release Notes Ver. 4.4.3Documento36 páginasLTRT-22018 MP-202 - MP-26x and MP-27x Release Notes Ver. 4.4.3Anonymous ygpt13y0ASAinda não há avaliações
- Business Vocab in Use Intermediate Unit 48Documento2 páginasBusiness Vocab in Use Intermediate Unit 48ScotdotcomAinda não há avaliações
- Cisco 800 Series Integrated Services Routers Software Configuration GuideDocumento478 páginasCisco 800 Series Integrated Services Routers Software Configuration GuidecsystemsAinda não há avaliações
- s3900 Series Configuration Guide PDFDocumento87 páginass3900 Series Configuration Guide PDFignaceAinda não há avaliações
- Qos SRND BookDocumento316 páginasQos SRND BookdazpiaAinda não há avaliações
- Nortel Voice FundamentalsDocumento43 páginasNortel Voice FundamentalsQuoc NhaAinda não há avaliações
- GPON Sevice Board Comparison PDFDocumento3 páginasGPON Sevice Board Comparison PDFSebastian MontesAinda não há avaliações
- KX TDA100 200 - Presentation PDFDocumento16 páginasKX TDA100 200 - Presentation PDFhappykglayAinda não há avaliações
- Rc551e 4geDocumento3 páginasRc551e 4geGocThuGianAinda não há avaliações
- Telecommunication Switching System Networks PDFDocumento22 páginasTelecommunication Switching System Networks PDFUdhay Prakash100% (8)
- IEEE P802.1DG - Time-Sensitive Networking Profile For Automotive In-Vehicle Ethernet Communications Call For ParticipationDocumento2 páginasIEEE P802.1DG - Time-Sensitive Networking Profile For Automotive In-Vehicle Ethernet Communications Call For Participationsmith dAinda não há avaliações
- PTN 3900 1900 912 - Product Description OptixDocumento32 páginasPTN 3900 1900 912 - Product Description Optixalejovp100% (1)
- Eth 100Documento7 páginasEth 100SarzaminKhanAinda não há avaliações
- NetPoint Pro 6x2.4 G2 Data SheetDocumento2 páginasNetPoint Pro 6x2.4 G2 Data SheetMartine OneAinda não há avaliações
- DVS-016 Series: Unmanaged Industrial 16-Port FE Ethernet SwitchesDocumento2 páginasDVS-016 Series: Unmanaged Industrial 16-Port FE Ethernet SwitchesOludamilola KujoreAinda não há avaliações
- Configure VPC peer link and network port channels on two switchesDocumento2 páginasConfigure VPC peer link and network port channels on two switchestester testerAinda não há avaliações
- 5.3.1.1 Switch Trio Instructions - ILMDocumento3 páginas5.3.1.1 Switch Trio Instructions - ILMKukuh Harsanto0% (1)
- PSP987 Bulu Barumun - PSP643 Sibuhuan, MLE-7HP To MLTN-7X, 0.6 To 1.2DP (New), 16E1 To 200 MBPS, 1+1HSDocumento8.959 páginasPSP987 Bulu Barumun - PSP643 Sibuhuan, MLE-7HP To MLTN-7X, 0.6 To 1.2DP (New), 16E1 To 200 MBPS, 1+1HSOkas PaskalAinda não há avaliações
- ZTE GPON Low Level Design - 20082014Documento25 páginasZTE GPON Low Level Design - 20082014Nhan LêAinda não há avaliações
- NSX For VSphere 6.4.4 Configuration - MaximumsDocumento10 páginasNSX For VSphere 6.4.4 Configuration - MaximumsJuan GonzálezAinda não há avaliações
- Torrent ProjectDocumento18 páginasTorrent ProjectRahulAinda não há avaliações
- AirLink RV50 Series Hardware User Guide - r5 PDFDocumento75 páginasAirLink RV50 Series Hardware User Guide - r5 PDFKrAinda não há avaliações
- VPN GRE Tunnel ConfigurationDocumento6 páginasVPN GRE Tunnel ConfigurationMauriceAinda não há avaliações