Você também pode gostar
- Cms Files 54701 1657238250apostila Eletrogate - Kit Arduino InicianteDocumento39 páginasCms Files 54701 1657238250apostila Eletrogate - Kit Arduino InicianteDG SoaresAinda não há avaliações
- Cms Files 54701 1657238074apostila Eletrogate - Kit Arduino MakerDocumento80 páginasCms Files 54701 1657238074apostila Eletrogate - Kit Arduino MakerlucianotiffAinda não há avaliações
- Conhecendo as ferramentas básicas do ArduinoDocumento60 páginasConhecendo as ferramentas básicas do ArduinoGrifushgAinda não há avaliações
- 11 Apostila Eletrogate - Kit Arduino Big JackDocumento102 páginas11 Apostila Eletrogate - Kit Arduino Big JackEldglay Da Silva DomingosAinda não há avaliações
- 08 Apostila Eletrogate - Kit Arduino Robo WiFiDocumento37 páginas08 Apostila Eletrogate - Kit Arduino Robo WiFiEldglay Da Silva DomingosAinda não há avaliações
- 03 Apostila Eletrogate - Kit Arduino StartDocumento35 páginas03 Apostila Eletrogate - Kit Arduino StartEldglay Da Silva DomingosAinda não há avaliações
- Apostila Eletrogate - Kit AutomaoDocumento68 páginasApostila Eletrogate - Kit AutomaoluizdaaopAinda não há avaliações
- Introdução à Arduino: Circuitos Elétricos e Componentes BásicosDocumento61 páginasIntrodução à Arduino: Circuitos Elétricos e Componentes BásicosLuizhcgAinda não há avaliações
- Cms Files 54701 1657238153apostila Eletrogate - Kit Arduino AdvancedDocumento74 páginasCms Files 54701 1657238153apostila Eletrogate - Kit Arduino AdvancedlucianotiffAinda não há avaliações
- Praça Conteiner - Planta Baixa PreliminarDocumento1 páginaPraça Conteiner - Planta Baixa PreliminarEldglay Da Silva DomingosAinda não há avaliações
- Aprenda Arduino com 10 projetos práticosDocumento68 páginasAprenda Arduino com 10 projetos práticosroselitoAinda não há avaliações
- Cms Files 54701 1670407279apostila Eletrogate - Kit Arduino Beginning PDFDocumento55 páginasCms Files 54701 1670407279apostila Eletrogate - Kit Arduino Beginning PDFAleksmatematicaAinda não há avaliações
- Aneel Atlas Da Energia Eletrica Do Brasil Blog - Conhecimentovaleouro - Blogspot.com by @viniciusf666Documento199 páginasAneel Atlas Da Energia Eletrica Do Brasil Blog - Conhecimentovaleouro - Blogspot.com by @viniciusf666JeffholandaAinda não há avaliações
- Freaklabs - Open Source Sem Fio - Luz Seqüenciamento e Decoding DMX Com Um ArduinoDocumento6 páginasFreaklabs - Open Source Sem Fio - Luz Seqüenciamento e Decoding DMX Com Um ArduinoEldglay Da Silva DomingosAinda não há avaliações
- Apostila de Inversores de Frequência 3Documento6 páginasApostila de Inversores de Frequência 3Thais PontesAinda não há avaliações
- Manual Correção Fator de Potência PotDocumento34 páginasManual Correção Fator de Potência PotLuiz UshijimaAinda não há avaliações
- Weg Cfw500 Manual de ProgramacaoDocumento158 páginasWeg Cfw500 Manual de ProgramacaoEldglay Da Silva DomingosAinda não há avaliações
- Manual ReativoDocumento12 páginasManual ReativoLima RochaAinda não há avaliações
- Manual Correção Fator de Potência PotDocumento34 páginasManual Correção Fator de Potência PotLuiz UshijimaAinda não há avaliações
- Manual de Energia Reativa: Como Reduzir Perdas e Melhorar o Sistema ElétricoDocumento13 páginasManual de Energia Reativa: Como Reduzir Perdas e Melhorar o Sistema ElétricoScarpatiAinda não há avaliações
- Livro Edificios Solares FotovoltaicosDocumento118 páginasLivro Edificios Solares FotovoltaicosMelissa Webster100% (2)
- Reações em vigas e estruturasDocumento4 páginasReações em vigas e estruturasWagner Dos SantosAinda não há avaliações
- Manua Rele DNI l0102Documento1 páginaManua Rele DNI l0102Eldglay Da Silva DomingosAinda não há avaliações
- Datasheet 24072013slaveDocumento2 páginasDatasheet 24072013slaveEldglay Da Silva DomingosAinda não há avaliações
- Introdução à medição de vazão com diferentes tipos de medidoresDocumento16 páginasIntrodução à medição de vazão com diferentes tipos de medidoresEldglay Da Silva DomingosAinda não há avaliações
- Compensação de Folgas e Erros de PassoDocumento4 páginasCompensação de Folgas e Erros de PassoEldglay Da Silva DomingosAinda não há avaliações
- Automacao CNCDocumento46 páginasAutomacao CNCrossbrAinda não há avaliações
- K30SLV100 ManualDocumento52 páginasK30SLV100 ManualAnonymous ACsUnjnmKjAinda não há avaliações
- AlinhamentobacklashDocumento3 páginasAlinhamentobacklashEldglay Da Silva DomingosAinda não há avaliações
- AlinhamentobacklashDocumento3 páginasAlinhamentobacklashEldglay Da Silva DomingosAinda não há avaliações
- Projeto de elevador residencial para passageirosDocumento57 páginasProjeto de elevador residencial para passageirosHédrick Colona100% (1)
- UNINTER disciplina controle contínuo atividadeDocumento5 páginasUNINTER disciplina controle contínuo atividademarcelo antonioAinda não há avaliações
- Sistema ELITE de Ensão & Cores de SabãoDocumento6 páginasSistema ELITE de Ensão & Cores de SabãoViclaurentizAinda não há avaliações
- Atividade AvaliativaDocumento3 páginasAtividade AvaliativaMarcos SousaAinda não há avaliações
- Funções VetoriaisDocumento18 páginasFunções Vetoriaisengeproduezo80% (5)
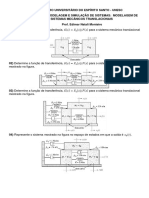
- UNESC Sistemas Mecânicos Translacionais ModelosDocumento2 páginasUNESC Sistemas Mecânicos Translacionais ModelosEnzo Gomes KohlertAinda não há avaliações
- Conteúdos de Matemática e Português para Processo SeletivoDocumento3 páginasConteúdos de Matemática e Português para Processo SeletivoLucas CoelhoAinda não há avaliações
- Fresando engrenagens cilíndricas com dentes helicoidaisDocumento7 páginasFresando engrenagens cilíndricas com dentes helicoidaisEnfa DaiAinda não há avaliações
- Relações trigonométricas triângulo retânguloDocumento7 páginasRelações trigonométricas triângulo retânguloStela MartinsAinda não há avaliações
- Relatorio Completo Modelo Queda LivreDocumento4 páginasRelatorio Completo Modelo Queda LivreGeisell CastroAinda não há avaliações
- Aulas de FísicaDocumento22 páginasAulas de FísicaSonia DiasAinda não há avaliações
- 12 EAC Proj Vest MAT Módulo 2 Matrizes e SistemasDocumento10 páginas12 EAC Proj Vest MAT Módulo 2 Matrizes e Sistemascon_seguirAinda não há avaliações
- Teste de avaliação 4 (90 min) - Resolução de problemas de estatística e probabilidadeDocumento4 páginasTeste de avaliação 4 (90 min) - Resolução de problemas de estatística e probabilidadeOlga Isabel da Silva Calhau f(1326)0% (1)
- Projeto de dutos ASME B31.4: cálculo de espessura de paredeDocumento37 páginasProjeto de dutos ASME B31.4: cálculo de espessura de paredeEdwin Rafael Puma CoricazaAinda não há avaliações
- Exemplos 6 de Física Geral 1 Trabalho e EnergiaDocumento2 páginasExemplos 6 de Física Geral 1 Trabalho e EnergiaWellmaxAinda não há avaliações
- Fis Epcar 98Documento3 páginasFis Epcar 98CLAUDIO MARIANO SILVAAinda não há avaliações
- ROTEIRO P SIMULAÇÃO Algarismos Significativos 2Documento6 páginasROTEIRO P SIMULAÇÃO Algarismos Significativos 2dotempolinhaAinda não há avaliações
- Determinação de Fluoreto em Enxaguante BucalDocumento13 páginasDeterminação de Fluoreto em Enxaguante BucalLeticiaAnd00100% (1)
- Matemática 6º Ano 4º BimestreDocumento3 páginasMatemática 6º Ano 4º BimestreFrancisco Felipe FilhoAinda não há avaliações
- RELATÓRIO - CONSELHO DE CLASSE - 1°bim - 2022Documento9 páginasRELATÓRIO - CONSELHO DE CLASSE - 1°bim - 2022Cláudia G. VianaAinda não há avaliações
- Prova AlgoritmoDocumento4 páginasProva Algoritmowagnerpqt52Ainda não há avaliações
- Áreas de figuras geométricasDocumento1 páginaÁreas de figuras geométricasProf. Carla DeniseAinda não há avaliações
- Batimento Radial e AxialDocumento11 páginasBatimento Radial e AxialMatheus FelipeAinda não há avaliações
- Formulário sobre trabalho, energia e forçasDocumento5 páginasFormulário sobre trabalho, energia e forçasMarcos RodriguesAinda não há avaliações
- Dimensionamento de Juntas Aparafusadas E Aplicação de Torque em Peças AutomotivasDocumento15 páginasDimensionamento de Juntas Aparafusadas E Aplicação de Torque em Peças AutomotivasIvan Scaglioni de OliveiraAinda não há avaliações
- Geometria Diferencial USPDocumento50 páginasGeometria Diferencial USPJosé Antonio Silva NetoAinda não há avaliações
- Cedência de Corte em PolímerosDocumento4 páginasCedência de Corte em PolímerosAntónio TeixeiraAinda não há avaliações
- Criando realidades através de exposiçõesDocumento122 páginasCriando realidades através de exposiçõesamatobrunogabrielAinda não há avaliações
- O Conceito de FunçãoDocumento7 páginasO Conceito de FunçãoRonaldo DamattaAinda não há avaliações
- Teste Matemática 9o AnoDocumento4 páginasTeste Matemática 9o AnoRaquelAinda não há avaliações