Você também pode gostar
- Configuraciones de Generadores DCDocumento4 páginasConfiguraciones de Generadores DCAndrea LuzónAinda não há avaliações
- Preparatorio Lab DigitalesDocumento9 páginasPreparatorio Lab DigitalesLaura VizcaínoAinda não há avaliações
- Manual de Maquinas Electricas Ut TecamachalcoDocumento139 páginasManual de Maquinas Electricas Ut TecamachalcoJuanAinda não há avaliações
- LabCirC - Pract4 - Parámetros de AC - DocxDocumento6 páginasLabCirC - Pract4 - Parámetros de AC - DocxStalin AguaizaAinda não há avaliações
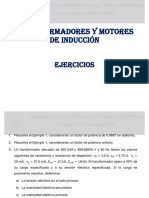
- Ejercicios U. 4 - 10 TransformadoresDocumento10 páginasEjercicios U. 4 - 10 TransformadoresMarinette BeristáinAinda não há avaliações
- Preparatorio 6Documento7 páginasPreparatorio 6Luis Edison TocaAinda não há avaliações
- Calcular de Circuitos Esta Determinado Por Una Cargar y Se Calcula ComoDocumento8 páginasCalcular de Circuitos Esta Determinado Por Una Cargar y Se Calcula ComoYajahira Batista SalcedoAinda não há avaliações
- Ejercicio Maquinas RotativasDocumento2 páginasEjercicio Maquinas Rotativasjonathan l0% (1)
- Ejemplo de Apliación de Las Máquinas Reales Corriente ContínuaDocumento3 páginasEjemplo de Apliación de Las Máquinas Reales Corriente ContínuaAlex Cruz PorcelAinda não há avaliações
- 1,17 - 2,11Documento8 páginas1,17 - 2,11Krristiian Rodrriguezz100% (2)
- LABORATORIO N 3 Elt 2641Documento12 páginasLABORATORIO N 3 Elt 2641Milton Guzman MenciaAinda não há avaliações
- Proyecto CafeteraDocumento10 páginasProyecto Cafeteraeliseo rodea100% (2)
- ME - Informe1 EPNDocumento5 páginasME - Informe1 EPNDianaAinda não há avaliações
- Guia de Practica 03 - Rectificadores Media Onda No ControladoDocumento10 páginasGuia de Practica 03 - Rectificadores Media Onda No ControladoWilliam López BayasAinda não há avaliações
- Ejercicios 3 PDFDocumento44 páginasEjercicios 3 PDFRicardoAinda não há avaliações
- Ut-3 Motor-Generador de C.D.Documento28 páginasUt-3 Motor-Generador de C.D.jesus arvizuAinda não há avaliações
- Practica 3Documento11 páginasPractica 3César Enrique Villamar LugoAinda não há avaliações
- INFORME Circuitos MagnéticosDocumento3 páginasINFORME Circuitos MagnéticosLuis E Araujo Leon100% (1)
- Ejercicios Tema 3 - SolDocumento37 páginasEjercicios Tema 3 - Soloscar acuña godoyAinda não há avaliações
- Diodos Con Carga RC y RLDocumento23 páginasDiodos Con Carga RC y RLJoe Chanco OAinda não há avaliações
- Ejercicios Maquinas U1 y U2Documento9 páginasEjercicios Maquinas U1 y U2Aaron AchoAinda não há avaliações
- NeumaticaDocumento6 páginasNeumaticaesteban rojasAinda não há avaliações
- Ejercicios Resonancia y Lugares GeometricosDocumento4 páginasEjercicios Resonancia y Lugares GeometricosMisael Romero100% (1)
- Problemas Filtros L-PiDocumento7 páginasProblemas Filtros L-PilouisAinda não há avaliações
- Semana 1 CONVERSIÓN DE ENERGÍA ELECTROMAGNÉTICADocumento7 páginasSemana 1 CONVERSIÓN DE ENERGÍA ELECTROMAGNÉTICAFher VerásteguiAinda não há avaliações
- Prueba 2 Ejercicios Primer Bimestre Electricidad GR5-2021BDocumento3 páginasPrueba 2 Ejercicios Primer Bimestre Electricidad GR5-2021BstearimofyAinda não há avaliações
- IELD4431 Simbaña Preparatorio 4 GR1 2Documento3 páginasIELD4431 Simbaña Preparatorio 4 GR1 2Joel AlexanderAinda não há avaliações
- Presentacion XCOS Palancas - Sistema Masa - Resorte - AmortiguadorDocumento14 páginasPresentacion XCOS Palancas - Sistema Masa - Resorte - AmortiguadorJohan Andres ARIAS CADAVIDAinda não há avaliações
- 12 Ejercicios de Máquina SincrónicaDocumento10 páginas12 Ejercicios de Máquina SincrónicaRuiz AdolfoAinda não há avaliações
- Papoulis - 'Probability, Random Variables and Stochastic Processes'Documento0 páginaPapoulis - 'Probability, Random Variables and Stochastic Processes'Angel AgAinda não há avaliações
- Circuitos Cmos 1Documento9 páginasCircuitos Cmos 1Paul R. ZamudioAinda não há avaliações
- Ejemplo S MimDocumento3 páginasEjemplo S MimDarruel Castellón AcevedoAinda não há avaliações
- Practica 10 Circuitos Resonantes 2019Documento5 páginasPractica 10 Circuitos Resonantes 2019DANIEL PATRICIO CADENA MEDRANDA0% (2)
- Informe 7 INSEP EPNDocumento4 páginasInforme 7 INSEP EPNIan BaqueroAinda não há avaliações
- Taller 3Documento4 páginasTaller 3Carlos ChaparröAinda não há avaliações
- Máquina de CC - 2020 - I PDFDocumento85 páginasMáquina de CC - 2020 - I PDFDiego SamanezAinda não há avaliações
- Tarea 2. Asignación de Polos EJERCICIOS 1 A 7 PDFDocumento30 páginasTarea 2. Asignación de Polos EJERCICIOS 1 A 7 PDFMaria Edith Domingo GaonaAinda não há avaliações
- Actividad 2°evaluación Electricidad CCDocumento2 páginasActividad 2°evaluación Electricidad CCArgenis AvilezAinda não há avaliações
- Ejercicios 4Documento42 páginasEjercicios 4micro62003Ainda não há avaliações
- El Motor Sincrono Ejercicios ResueltosDocumento16 páginasEl Motor Sincrono Ejercicios ResueltosYesid Oscar Chambi CáceresAinda não há avaliações
- Solucionario Duncan GloverDocumento3 páginasSolucionario Duncan GloverJorge DelaurensAinda não há avaliações
- Informe Practica #4 Diodos SujetadoresDocumento18 páginasInforme Practica #4 Diodos SujetadoresFrancisco ImbachiAinda não há avaliações
- E1 Guia 5Documento8 páginasE1 Guia 5Edwin Alex Ovando SaavedraAinda não há avaliações
- Generadores de Corriente Directa (CD) : ApítuloDocumento25 páginasGeneradores de Corriente Directa (CD) : ApítuloJesus Abaroa RdzAinda não há avaliações
- Informe 6 - Transitorios en CircuitosDocumento6 páginasInforme 6 - Transitorios en CircuitosDiegoAinda não há avaliações
- Ejemplo Espira GiratoriaDocumento3 páginasEjemplo Espira GiratoriaAlex Cruz PorcelAinda não há avaliações
- Transformada ZDocumento21 páginasTransformada ZrobotikioAinda não há avaliações
- LAB - ME - Preparatorio 02Documento4 páginasLAB - ME - Preparatorio 02Jorge Chalco MHAinda não há avaliações
- Presentación Convertidor CukDocumento10 páginasPresentación Convertidor CukJoselyn Viviana Guillen NogalesAinda não há avaliações
- Acondicionamiento de Señal para Sensor InductivoDocumento5 páginasAcondicionamiento de Señal para Sensor InductivoJorge MarioAinda não há avaliações
- Preparatorio 4Documento5 páginasPreparatorio 4Alexandra I.100% (1)
- Amplificador Operacional IntegradorDocumento4 páginasAmplificador Operacional IntegradorWladimir EspinAinda não há avaliações
- Problemas Unidad 1-MakinasDocumento6 páginasProblemas Unidad 1-MakinasAntonio Moreno0% (1)
- Ejercicios 8.1 A 8.7 TocciDocumento9 páginasEjercicios 8.1 A 8.7 Toccimiguel ramosAinda não há avaliações
- IEDL443L Quinga Prepa3 GR2 3Documento5 páginasIEDL443L Quinga Prepa3 GR2 3Jesica QuingaAinda não há avaliações
- Ejercicios 5Documento20 páginasEjercicios 5Carlos CáceresAinda não há avaliações
- Ejercicios 5-DesbloqueadoDocumento13 páginasEjercicios 5-Desbloqueadocopiapo123456Ainda não há avaliações
- Ejercicios 5Documento13 páginasEjercicios 5RobertAragónLduAinda não há avaliações
- 04-Matriz de TransferenciaDocumento20 páginas04-Matriz de TransferenciactagmAinda não há avaliações
- Repaso de ControlesDocumento145 páginasRepaso de ControlesSebastian CorredorAinda não há avaliações
- Inf. Topografico Tambo - UchuraccayDocumento173 páginasInf. Topografico Tambo - UchuraccayFrank Huaccachi JulianAinda não há avaliações
- Ensayo de LugeonDocumento3 páginasEnsayo de LugeonFrank Huaccachi JulianAinda não há avaliações
- Plantilla de Informe.Documento17 páginasPlantilla de Informe.Frank Huaccachi JulianAinda não há avaliações
- CRONOGRAMA Peiodico IIDocumento4 páginasCRONOGRAMA Peiodico IIFrank Huaccachi JulianAinda não há avaliações
- Informe Casisa 2021Documento11 páginasInforme Casisa 2021Frank Huaccachi JulianAinda não há avaliações
- Diseño DG 2018 PRG.2+000-23+500Documento11 páginasDiseño DG 2018 PRG.2+000-23+500Frank Huaccachi JulianAinda não há avaliações
- Diseño DG 2018 PRG.0+000-2+000Documento9 páginasDiseño DG 2018 PRG.0+000-2+000Frank Huaccachi JulianAinda não há avaliações
- InsumoDocumento22 páginasInsumoFrank Huaccachi JulianAinda não há avaliações
- Informe de RenunciaDocumento1 páginaInforme de RenunciaFrank Huaccachi JulianAinda não há avaliações
- Pre Supuesto Client e Resume NDocumento36 páginasPre Supuesto Client e Resume NFrank Huaccachi JulianAinda não há avaliações
- Resumen EjecutivoDocumento21 páginasResumen EjecutivoFrank Huaccachi JulianAinda não há avaliações
- Pre Supuesto Client e Resume NDocumento40 páginasPre Supuesto Client e Resume NFrank Huaccachi JulianAinda não há avaliações
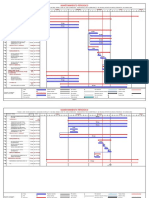
- Cronograma - Mantenimiento Periodico - OKDocumento1 páginaCronograma - Mantenimiento Periodico - OKFrank Huaccachi JulianAinda não há avaliações
- Calculo de Flete Terrestre PistasDocumento7 páginasCalculo de Flete Terrestre PistasFrank Huaccachi JulianAinda não há avaliações
- Memoria Descriptiva Parque AccosaDocumento13 páginasMemoria Descriptiva Parque AccosaFrank Huaccachi JulianAinda não há avaliações
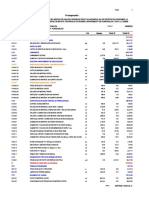
- Presupuesto DesagregadoDocumento5 páginasPresupuesto DesagregadoFrank Huaccachi JulianAinda não há avaliações
- Analisis de Costos UnitariosDocumento37 páginasAnalisis de Costos UnitariosFrank Huaccachi JulianAinda não há avaliações
- Moviliz y Desmol de Equipos y Maquinarias AccosaDocumento2 páginasMoviliz y Desmol de Equipos y Maquinarias AccosaFrank Huaccachi JulianAinda não há avaliações
- Muro de ContencionDocumento21 páginasMuro de ContencionFrank Huaccachi JulianAinda não há avaliações
- Ética y Deontología-Valores Profesionales FinalDocumento15 páginasÉtica y Deontología-Valores Profesionales FinalFrank Huaccachi JulianAinda não há avaliações
- Calculo de EncauzamientoDocumento29 páginasCalculo de EncauzamientoFrank Huaccachi JulianAinda não há avaliações
- La Eco EficienciaDocumento22 páginasLa Eco EficienciaFrank Huaccachi JulianAinda não há avaliações
- TEMARIODocumento4 páginasTEMARIOPERCY VITON DIAZAinda não há avaliações
- Selección de ResortesDocumento14 páginasSelección de ResortesBraulio Romero Ramirez100% (2)
- PsicomotricidadDocumento23 páginasPsicomotricidadEugenio AlegreAinda não há avaliações
- Neisser Meyer Quispe Lopez Perfil Noviembre VDocumento57 páginasNeisser Meyer Quispe Lopez Perfil Noviembre VJhon Richard QuispeAinda não há avaliações
- Ejercicios Semana 8Documento4 páginasEjercicios Semana 8Gabriel Agripino100% (1)
- Ficha Tecnica OPzS VesnaDocumento1 páginaFicha Tecnica OPzS VesnaAnonymous y4YES82Ainda não há avaliações
- Evaluacion Unidad 3 de Calculo Integral PDFDocumento7 páginasEvaluacion Unidad 3 de Calculo Integral PDFLUZ MORENO0% (1)
- Mapa MentalDocumento1 páginaMapa MentalEmily CoradoAinda não há avaliações
- Hornos Resumen Operaciones UnitariasDocumento29 páginasHornos Resumen Operaciones UnitariasVianey LunaAinda não há avaliações
- Propiedades Fisicas de Los FluidosDocumento6 páginasPropiedades Fisicas de Los FluidosCatherine PajaresAinda não há avaliações
- Testt ExplosivosDocumento26 páginasTestt ExplosivosCinta Sintin100% (1)
- Teoria de MecanismosDocumento56 páginasTeoria de Mecanismosesteban4villagra-1Ainda não há avaliações
- Practicas de LubricantessDocumento8 páginasPracticas de LubricantessJairoAinda não há avaliações
- Funcion Cuadratica (Apunte y Ejercicios)Documento6 páginasFuncion Cuadratica (Apunte y Ejercicios)Pabel QRAinda não há avaliações
- Parcial 1 AlgebraDocumento4 páginasParcial 1 AlgebraJalimRoyeAinda não há avaliações
- Contraste Hipotesis 3rDocumento15 páginasContraste Hipotesis 3rCesar Cieza SantillanAinda não há avaliações
- Aportes de Lavoisier A La QuímicaDocumento4 páginasAportes de Lavoisier A La QuímicaIsaac SanchezAinda não há avaliações
- Respuestas A Ejercicios Seleccionados: Capítulo 1Documento15 páginasRespuestas A Ejercicios Seleccionados: Capítulo 1renata bustamanteAinda não há avaliações
- 2 DimenDocumento6 páginas2 DimenJonathan RcaAinda não há avaliações
- Sensores de Nivel de LiquidosDocumento10 páginasSensores de Nivel de LiquidosDUT-92Ainda não há avaliações
- Informe DiaclasasDocumento22 páginasInforme DiaclasasJahir MaguiñaAinda não há avaliações
- Instrumentos para Medir Las PrecipitacionesDocumento3 páginasInstrumentos para Medir Las PrecipitacionesMrthe MrtheAinda não há avaliações
- Taller 2 - Potencial Eléctrico y CapacitanciaDocumento6 páginasTaller 2 - Potencial Eléctrico y CapacitanciaAnibal Tobar0% (1)
- Reflexión y RefracciónDocumento19 páginasReflexión y RefracciónCARLOS EDUARDO CARDENAS GUEVARAAinda não há avaliações
- Familias LógicasDocumento10 páginasFamilias LógicasRamirez ZurielAinda não há avaliações
- Sensores Mecanicos y ElectricosDocumento12 páginasSensores Mecanicos y ElectricosRosmaryCafaro100% (1)
- MEMORIA DE CÁLCULO ESTRUCTURAL TamesisDocumento18 páginasMEMORIA DE CÁLCULO ESTRUCTURAL TamesisBarbara JessiAinda não há avaliações
- Taller 1 - 2023-3Documento5 páginasTaller 1 - 2023-3Estefanie CeballosAinda não há avaliações
- INFORME PROYECTO Cercha 5TOBDocumento14 páginasINFORME PROYECTO Cercha 5TOBAdriana Carolina Uchazara CondeAinda não há avaliações
- Energía en República DominicanaDocumento13 páginasEnergía en República DominicanaynnoelAinda não há avaliações