Você também pode gostar
- Simulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysNo EverandSimulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysAinda não há avaliações
- Tp N°03Documento2 páginasTp N°03No OneAinda não há avaliações
- Sujet 1 CAO Genie Electrique BTS 2020Documento3 páginasSujet 1 CAO Genie Electrique BTS 2020Yann TenifouetAinda não há avaliações
- CV Med EssahafiDocumento1 páginaCV Med Essahafidunod2012100% (2)
- Physique Terminale S Tome 1 135Documento3 páginasPhysique Terminale S Tome 1 135ely ElassryAinda não há avaliações
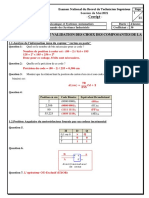
- Composition Du Sujet:: Le Sujet Comporte Trois Parties IndépendantesDocumento5 páginasComposition Du Sujet:: Le Sujet Comporte Trois Parties IndépendantesImad ElberrouaguiAinda não há avaliações
- Memoire Fin D'étude Master (Régulation de Vitesse Et Position D'une MCC)Documento48 páginasMemoire Fin D'étude Master (Régulation de Vitesse Et Position D'une MCC)Ỗś ɱŏ100% (2)
- Sujet 2 CAO Genie Electrique BTS 2020Documento3 páginasSujet 2 CAO Genie Electrique BTS 2020Yann TenifouetAinda não há avaliações
- 08-09 ATI2 CM TP Cinematique-III Faac PDFDocumento7 páginas08-09 ATI2 CM TP Cinematique-III Faac PDFZaafoury WassimAinda não há avaliações
- Master Korichi KerrecheDocumento83 páginasMaster Korichi KerrecheAbderrahmane AyounAinda não há avaliações
- Expériences ProfessionnellesDocumento1 páginaExpériences ProfessionnellesFernand djeffAinda não há avaliações
- CV Min PDFDocumento2 páginasCV Min PDFbeliveAinda não há avaliações
- Inbound 5284095911142812639Documento5 páginasInbound 5284095911142812639Belmaghraoui khalidAinda não há avaliações
- CV YoussefDocumento1 páginaCV YoussefYoussef BabaAinda não há avaliações
- OfpptDocumento2 páginasOfpptAmin TaamouchAinda não há avaliações
- CV Sakli MouadhDocumento2 páginasCV Sakli MouadhVukeAinda não há avaliações
- Rapport Banc de PuissanceDocumento35 páginasRapport Banc de PuissanceMohamed WatoutiAinda não há avaliações
- MathDocumento1 páginaMathAmin TaamouchAinda não há avaliações
- Commande ElectriqueDocumento37 páginasCommande ElectriqueAbdelbaki ElfahemAinda não há avaliações
- Stage Marsa Maroc AutomatismeDocumento58 páginasStage Marsa Maroc AutomatismeFatima Zahra100% (1)
- CV Dourhri Anouar - FrenchDocumento2 páginasCV Dourhri Anouar - FrenchDEEPBLUE314Ainda não há avaliações
- Projet Industriel de Fin D'études: Filière Génie Mécanique Option EnergétiqueDocumento93 páginasProjet Industriel de Fin D'études: Filière Génie Mécanique Option EnergétiqueFor DriveAinda não há avaliações
- Unité3 TPDocumento5 páginasUnité3 TPAzzeddine EL-OhnAinda não há avaliações
- Corrigé CSI 21Documento11 páginasCorrigé CSI 21Crazy ytAinda não há avaliações
- Adobe Scan 07 Mai 2021Documento9 páginasAdobe Scan 07 Mai 2021denis yakouaAinda não há avaliações
- Sessions de Formation Autodesk Robot Structures Analysisi ProfessionneleDocumento2 páginasSessions de Formation Autodesk Robot Structures Analysisi ProfessionneleAnonymous IASq7xbNY3100% (1)
- Gcu 2223 FRDocumento136 páginasGcu 2223 FRbockouAinda não há avaliações
- ELC5011-TECHNOLOGIES EMBARQUEES - 2023 - 2024 - v2Documento6 páginasELC5011-TECHNOLOGIES EMBARQUEES - 2023 - 2024 - v2younesselghazouani123Ainda não há avaliações
- (TDP) (TD) TS Monte ChargeDocumento2 páginas(TDP) (TD) TS Monte ChargemezziAinda não há avaliações
- Plan de Cours Design Des Systèmes Mécaniques A22Documento2 páginasPlan de Cours Design Des Systèmes Mécaniques A22Hamza CHAIBOUBAinda não há avaliações
- Tkhribi9at ZwinaDocumento1 páginaTkhribi9at Zwinaismail mbarkiAinda não há avaliações
- Calculatrice Scientifique Non ProgrammableDocumento8 páginasCalculatrice Scientifique Non ProgrammableImad ElberrouaguiAinda não há avaliações
- 1A Automatisme TS PDocumento37 páginas1A Automatisme TS Pkra micaelAinda não há avaliações
- Elc610 Electronique de Commande 2020 2021 ValidéDocumento6 páginasElc610 Electronique de Commande 2020 2021 ValidéOssama SariaAinda não há avaliações
- Master Academique: Etude Et Simulation D'un Convertisseur Ac / DCDocumento90 páginasMaster Academique: Etude Et Simulation D'un Convertisseur Ac / DCKillua ZoldekAinda não há avaliações
- sti2d-rat-2013-scooter2Documento10 páginassti2d-rat-2013-scooter2Manveer singhAinda não há avaliações
- Efm V3Documento2 páginasEfm V3badr hadriAinda não há avaliações
- Rapport PFE (2019 ACHKARFACH - SABIRI) : Développement D'un Logiciel de Calcul Des Tabliers Des Ponts Dalles.Documento141 páginasRapport PFE (2019 ACHKARFACH - SABIRI) : Développement D'un Logiciel de Calcul Des Tabliers Des Ponts Dalles.Sb HassanAinda não há avaliações
- CV YasserDocumento1 páginaCV YasserpfeAinda não há avaliações
- Pfe MouhcineDocumento87 páginasPfe MouhcineYouness BOURHIMAinda não há avaliações
- Cours Polytech Montreal VBA-ExcelDocumento13 páginasCours Polytech Montreal VBA-ExcelKatia DaliAinda não há avaliações
- Presentation Post Bac LyceeDocumento42 páginasPresentation Post Bac LyceeWydadAinda não há avaliações
- Acfrogdyxjiwp Ratrpjgg2haksg3vntsm C 3ymyugpclnuq39rtfnbayb3etrhitiyukd66fkfhkgdnkrl2pay7e3ch8iou3oxgv960ypqz Gog2d8hinaczol8dp3gw7exi 8ulvy05v8uedcDocumento7 páginasAcfrogdyxjiwp Ratrpjgg2haksg3vntsm C 3ymyugpclnuq39rtfnbayb3etrhitiyukd66fkfhkgdnkrl2pay7e3ch8iou3oxgv960ypqz Gog2d8hinaczol8dp3gw7exi 8ulvy05v8uedcImad ElberrouaguiAinda não há avaliações
- XFWh7pnRODjZqeGfo0saSxlM9k3bQUvBNtmA6C 582-1YPrLuwDocumento2 páginasXFWh7pnRODjZqeGfo0saSxlM9k3bQUvBNtmA6C 582-1YPrLuwNeoXana01Ainda não há avaliações
- RS211 ApdfDocumento22 páginasRS211 ApdfAhmed ChebchoubAinda não há avaliações
- EXAMEN LAAYOUNEdfinalDocumento9 páginasEXAMEN LAAYOUNEdfinallinaajnaouAinda não há avaliações
- Fiches matières-La-Genie-Mecanique-Iset PDFDocumento170 páginasFiches matières-La-Genie-Mecanique-Iset PDFMannou Souma67% (3)
- Rapport PFE - MR HAMMOUTENE Mohamed IslamDocumento105 páginasRapport PFE - MR HAMMOUTENE Mohamed IslamAEX3 111Ainda não há avaliações
- Filiere ELEC - 2022Documento42 páginasFiliere ELEC - 2022Batiste ArnaudAinda não há avaliações
- Travail - A - Rendre - MCC - MatlabDocumento2 páginasTravail - A - Rendre - MCC - MatlabOussama OussamaAinda não há avaliações
- Logique CombinatoireDocumento136 páginasLogique Combinatoiretahourahmed0% (1)
- U1 2021 Sujet 230529 131231Documento25 páginasU1 2021 Sujet 230529 131231elfanidi ELFANIDIAinda não há avaliações
- Ingénierie Mécanique - Transmission de Puissance - Tome 1 - 4e Éd.Documento272 páginasIngénierie Mécanique - Transmission de Puissance - Tome 1 - 4e Éd.Jacques BONOU100% (1)
- Major IccDocumento30 páginasMajor IccbtscrsaaAinda não há avaliações
- Control #2 - 5eme Année Cours Du JourDocumento6 páginasControl #2 - 5eme Année Cours Du JourMariya KsslAinda não há avaliações
- AbcdDocumento3 páginasAbcdAimé ZahuiAinda não há avaliações
- Des Techniciens de GenerateurDocumento2 páginasDes Techniciens de GenerateurDemba KanouteAinda não há avaliações
- Base Technologique FKDocumento9 páginasBase Technologique FKmarclousAinda não há avaliações
- Issam ELHAMOUDANI Vehicle Functional Safety DesignerDocumento2 páginasIssam ELHAMOUDANI Vehicle Functional Safety DesignerFadelBennisAinda não há avaliações
- Thème: Master AcademiqueDocumento128 páginasThème: Master AcademiqueBa Bi91Ainda não há avaliações
- Libro b2Documento254 páginasLibro b2Gabriela García SerranoAinda não há avaliações
- 2 Escalier en Beton ArmeDocumento2 páginas2 Escalier en Beton ArmeTahirou KonatéAinda não há avaliações
- (PDF) Cours Complet en Electricite Batiment - Cours ElectriciteDocumento1 página(PDF) Cours Complet en Electricite Batiment - Cours ElectriciteYves LakeuAinda não há avaliações
- Qdoc - Tips ExaolinDocumento7 páginasQdoc - Tips ExaolinFlorian FerreiraAinda não há avaliações
- Chapitre 3 Routage Et CommutationDocumento2 páginasChapitre 3 Routage Et CommutationAmel FERARSAAinda não há avaliações
- 7PH06TE0420 Partie2Documento16 páginas7PH06TE0420 Partie2viator P.NAinda não há avaliações
- Tutoriel Radio Mobil PDFDocumento17 páginasTutoriel Radio Mobil PDFechaib mohammedAinda não há avaliações
- Majestic's FR Cadrans de Radiesthesie v1.5Documento84 páginasMajestic's FR Cadrans de Radiesthesie v1.5Eric TataAinda não há avaliações
- URGENT Directeur de L'usineDocumento4 páginasURGENT Directeur de L'usineYves Taylor NguiyaAinda não há avaliações
- Fiesta Entretien 140000Documento1 páginaFiesta Entretien 140000Seb NagelAinda não há avaliações
- Meziane, Mohamed CherifDocumento135 páginasMeziane, Mohamed Cherifmo3tezbaAinda não há avaliações
- Nicolas Le DOUXDocumento41 páginasNicolas Le DOUXAhmed El abdellaouiAinda não há avaliações
- Cahier Des ChargesDocumento3 páginasCahier Des ChargesFteiti MondherAinda não há avaliações
- Connecteurs LogiqueDocumento1 páginaConnecteurs LogiqueJuKannAinda não há avaliações
- ImportDocumento672 páginasImportpurunjay joshiAinda não há avaliações
- Guide AIFI1Documento14 páginasGuide AIFI1BORN AliceAinda não há avaliações
- 3NA3832 Datasheet FRDocumento6 páginas3NA3832 Datasheet FRMohamed DhifallahAinda não há avaliações
- Communiqué de Presse: Changement de Bureau À l'AFNEUSDocumento2 páginasCommuniqué de Presse: Changement de Bureau À l'AFNEUSAFNEUS: Fédération Nationale des Etudiants en SciencesAinda não há avaliações
- TD3 2012Documento10 páginasTD3 2012ADELA MBOUZEKOAinda não há avaliações
- Code de Bonne Conduite Matériaux Bitumineux Coulés À FroidDocumento92 páginasCode de Bonne Conduite Matériaux Bitumineux Coulés À FroidWilly Victor ObamAinda não há avaliações
- Série D'exercices N°1 Lycée Pilote - Sciences Physiques CINEMATIQUE - Bac Sciences (2012-2013) MR Abdellahi Ahmed TalebDocumento2 páginasSérie D'exercices N°1 Lycée Pilote - Sciences Physiques CINEMATIQUE - Bac Sciences (2012-2013) MR Abdellahi Ahmed TalebWiem BenchahbounAinda não há avaliações
- Sacrorum Conciliorum Nova Et Amplissima Collectio. Tomus 13. Ab Anno DCCLXXXVII Ufque Ad Annum DCCCXIV Inclufiue. N0051595 - PDF - 1 - 1DMDocumento560 páginasSacrorum Conciliorum Nova Et Amplissima Collectio. Tomus 13. Ab Anno DCCLXXXVII Ufque Ad Annum DCCCXIV Inclufiue. N0051595 - PDF - 1 - 1DMPatrologia Latina, Graeca et OrientalisAinda não há avaliações
- TD N°7 2SM 2023-24 (Exponentielle)Documento4 páginasTD N°7 2SM 2023-24 (Exponentielle)yassine laelianiAinda não há avaliações
- Igo 21 PDFDocumento4 páginasIgo 21 PDFAlex Paye AncoAinda não há avaliações
- Tissus PDFDocumento39 páginasTissus PDFAbdelah El ArabiAinda não há avaliações
- Cours SGBD5Documento64 páginasCours SGBD5Leïla GazzehAinda não há avaliações
- Guercif Plan Directeur Mission 3 Avril 2017Documento65 páginasGuercif Plan Directeur Mission 3 Avril 2017Med AssiouiAinda não há avaliações
- Examen DWHDocumento2 páginasExamen DWHthemister83Ainda não há avaliações
- SOLV-Safety-Manual - Abridged - IIPP-SE - V2.3 FRDocumento83 páginasSOLV-Safety-Manual - Abridged - IIPP-SE - V2.3 FRsofianealvarrezAinda não há avaliações
- Stockage Energie E JanettiDocumento7 páginasStockage Energie E Janettisamboss1904Ainda não há avaliações