Você também pode gostar
- Low Budget Music Promotion and PublicityDocumento41 páginasLow Budget Music Promotion and PublicityFola Folayan100% (3)
- Modern School For SaxophoneDocumento23 páginasModern School For SaxophoneAllen Demiter65% (23)
- Organic Chemistry 1Documento265 páginasOrganic Chemistry 1Israk Mustakim IslamAinda não há avaliações
- Comparison of PubMed, Scopus, Web of Science, and Google Scholar - Strengths and WeaknessesDocumento5 páginasComparison of PubMed, Scopus, Web of Science, and Google Scholar - Strengths and WeaknessesMostafa AbdelrahmanAinda não há avaliações
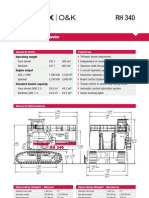
- Hydraulic Mining ExcavatorDocumento8 páginasHydraulic Mining Excavatorasditia_07100% (1)
- Electronic Spin Inversion: A Danger To Your HealthDocumento4 páginasElectronic Spin Inversion: A Danger To Your Healthambertje12Ainda não há avaliações
- Transportasi Distribusi MigasDocumento25 páginasTransportasi Distribusi MigasDian Permatasari100% (1)
- Mechanical Engineering - Workshop Practice - Laboratory ManualDocumento77 páginasMechanical Engineering - Workshop Practice - Laboratory Manualrajeevranjan_br100% (4)
- Introduction To Robotics: Talk The TalkDocumento49 páginasIntroduction To Robotics: Talk The TalkManar HosnyAinda não há avaliações
- Fuzzy 3Documento8 páginasFuzzy 3engrodeAinda não há avaliações
- Vision Based Autonomous Path Tracking ofDocumento9 páginasVision Based Autonomous Path Tracking ofrachid alikaAinda não há avaliações
- A Tele-Operation Interface With A Motion Capture System and A Haptic GloveDocumento6 páginasA Tele-Operation Interface With A Motion Capture System and A Haptic GloveVigneshGsAinda não há avaliações
- Different Kinematic Path Following Controllers For A Wheeled Mobile Robot of (2,0) TypeDocumento18 páginasDifferent Kinematic Path Following Controllers For A Wheeled Mobile Robot of (2,0) TypemonikAinda não há avaliações
- Implementation of VFHDocumento6 páginasImplementation of VFHqwerty uAinda não há avaliações
- 32423-Article Text-33991-1-10-20190711Documento7 páginas32423-Article Text-33991-1-10-20190711aliAinda não há avaliações
- journal-Observer-Based Adaptive Tracking Control ofDocumento10 páginasjournal-Observer-Based Adaptive Tracking Control ofPham ThuanAinda não há avaliações
- Learning Probabilistics ModelsDocumento6 páginasLearning Probabilistics Modelssshak9Ainda não há avaliações
- Variable Formation Control of Multiple Robots Via VRC and Formation Switching To Accommodate Large Heading Changes by Leader RobotDocumento12 páginasVariable Formation Control of Multiple Robots Via VRC and Formation Switching To Accommodate Large Heading Changes by Leader Robotkurts010Ainda não há avaliações
- A Method of Indoor Mobile Robot Navigation by Using ControlDocumento6 páginasA Method of Indoor Mobile Robot Navigation by Using ControlengrodeAinda não há avaliações
- Hiremath 2012 Image Based Particle Ltering For Robot Navigation in A Maize EldDocumento5 páginasHiremath 2012 Image Based Particle Ltering For Robot Navigation in A Maize EldjfrasconAinda não há avaliações
- 14 - Int.J.Control 2014Documento11 páginas14 - Int.J.Control 2014Lâm BảoAinda não há avaliações
- Position Estimation Through Sensor Data Fusion and Path Control of An Omnidirectional RobotDocumento6 páginasPosition Estimation Through Sensor Data Fusion and Path Control of An Omnidirectional RobotVictorSAinda não há avaliações
- Position Control of A Mobile Robot Through PID ConDocumento7 páginasPosition Control of A Mobile Robot Through PID ConTuan Anh HoangAinda não há avaliações
- Introduction To RoboticsDocumento49 páginasIntroduction To RoboticsTaher TawabAinda não há avaliações
- A Robust Adaptive Control of Mecanum Wheel Mobile Robot Simulation and Experimental ValidationDocumento6 páginasA Robust Adaptive Control of Mecanum Wheel Mobile Robot Simulation and Experimental ValidationShivi SivaAinda não há avaliações
- Implementation of An Object-Grasping Robot Arm Using Stereo Vision Measurement and Fuzzy ControlDocumento13 páginasImplementation of An Object-Grasping Robot Arm Using Stereo Vision Measurement and Fuzzy ControlWikipedia.Ainda não há avaliações
- Camera Ready 34Documento6 páginasCamera Ready 34thuanhoang70Ainda não há avaliações
- 01 - Main - Good - Automatica - 2014 - Adaptive Output Feedback.Documento11 páginas01 - Main - Good - Automatica - 2014 - Adaptive Output Feedback.Lâm BảoAinda não há avaliações
- Chapter 3 Autonomous Robot - KinematicsDocumento35 páginasChapter 3 Autonomous Robot - KinematicsHoang Anh Nguyen QuocAinda não há avaliações
- 2011 An Adaptive Trajectory Tracking Control of Wheel Mobile RobotsDocumento5 páginas2011 An Adaptive Trajectory Tracking Control of Wheel Mobile RobotsChanel For KidsAinda não há avaliações
- TaiLieu1 MoHinhDocumento16 páginasTaiLieu1 MoHinhTùng ĐặngAinda não há avaliações
- 2 Scsa1406 PDFDocumento107 páginas2 Scsa1406 PDFKIran MohanAinda não há avaliações
- Papper To Read Successfuly 11Documento6 páginasPapper To Read Successfuly 11thrithunAinda não há avaliações
- Automated Navigation Using Snake-Like RobotDocumento6 páginasAutomated Navigation Using Snake-Like RobotAfzal AhmadAinda não há avaliações
- Mobile Robot RefDocumento25 páginasMobile Robot Refchoc_ngoayAinda não há avaliações
- Design and Implementation of A Multi-Robot System Based On Zigbee NetworkDocumento5 páginasDesign and Implementation of A Multi-Robot System Based On Zigbee NetworkVô Hạ Thiên VươngAinda não há avaliações
- Roy Icra CalibDocumento8 páginasRoy Icra CalibNguyen Tien AnhAinda não há avaliações
- Obstacle Avoidance and Control of Swedish Wheeled Mobile RobotDocumento8 páginasObstacle Avoidance and Control of Swedish Wheeled Mobile RobotArjun HajongAinda não há avaliações
- NavigationDocumento17 páginasNavigationQuan NguyenAinda não há avaliações
- Choi 2020Documento12 páginasChoi 2020Duby CastellanosAinda não há avaliações
- Obstacles Avoidance Method For An Autonomous Mobile Robot Using Two IR SensorsDocumento4 páginasObstacles Avoidance Method For An Autonomous Mobile Robot Using Two IR SensorsDeeksha AggarwalAinda não há avaliações
- Balancing Control of A Two Wheeled Mobile Robot SystemDocumento7 páginasBalancing Control of A Two Wheeled Mobile Robot SystemAbdellilah HattabAinda não há avaliações
- MOBRO Localisation SlidesDocumento106 páginasMOBRO Localisation SlidesaustinvishalAinda não há avaliações
- Adaptive Stabilization and Tracking Control of A Nonholonomic Mobile Robot WithDocumento8 páginasAdaptive Stabilization and Tracking Control of A Nonholonomic Mobile Robot Withhind90Ainda não há avaliações
- Research On Motion Control Algorithm For Mirosot Soccer RobotDocumento4 páginasResearch On Motion Control Algorithm For Mirosot Soccer RobotMuhammad RenaldyAinda não há avaliações
- Fuzzy Control of Omnidirectional RobotDocumento9 páginasFuzzy Control of Omnidirectional RobotRida ahmedAinda não há avaliações
- MIMO Fuzzy Control For Autonomous Mobile RobotDocumento6 páginasMIMO Fuzzy Control For Autonomous Mobile RobotaliAinda não há avaliações
- Quadruped Robot With Stabilization Algorithm On Uneven Floor Using 6 DOF IMU Based Inverse KinematicDocumento6 páginasQuadruped Robot With Stabilization Algorithm On Uneven Floor Using 6 DOF IMU Based Inverse KinematicfarlockAinda não há avaliações
- Adaptive Control of Mobile Manipulator To Track Horizontal Smooth Curved Apply For Welding ProcessDocumento10 páginasAdaptive Control of Mobile Manipulator To Track Horizontal Smooth Curved Apply For Welding ProcessAJER JOURNALAinda não há avaliações
- Bipped LegDocumento7 páginasBipped LegRonald JosephAinda não há avaliações
- Accelerometer-Based Control of An Industrial Robotic ArmDocumento6 páginasAccelerometer-Based Control of An Industrial Robotic ArmsanjusanjanareddyAinda não há avaliações
- Encoder Con Mouse OpticoDocumento9 páginasEncoder Con Mouse OpticoJorge Hernán Osorio SánchezAinda não há avaliações
- Jurnal Fix 2Documento17 páginasJurnal Fix 2tataAinda não há avaliações
- Balance Control For Two-Wheeled Robot Via Neural-Fuzzy TechniqueDocumento5 páginasBalance Control For Two-Wheeled Robot Via Neural-Fuzzy TechniqueSomeone LolAinda não há avaliações
- Control of Biped Robot With Stable WalkingDocumento22 páginasControl of Biped Robot With Stable WalkingAJER JOURNALAinda não há avaliações
- Robust Adaptive Controller For Wheel Mobile Robot With Disturbances and Wheel SlipsDocumento11 páginasRobust Adaptive Controller For Wheel Mobile Robot With Disturbances and Wheel SlipsKhải VũAinda não há avaliações
- Trajectory Planning and Control of One-Legged Hopping Robot at Thrusting PhaseDocumento8 páginasTrajectory Planning and Control of One-Legged Hopping Robot at Thrusting PhaseAlina MirelaAinda não há avaliações
- Robô Pêndulo 2 Rodas - 1Documento7 páginasRobô Pêndulo 2 Rodas - 1Victor PassosAinda não há avaliações
- Delta Robot Literature Riview PDFDocumento11 páginasDelta Robot Literature Riview PDFArif AbbasiAinda não há avaliações
- SM3075Documento15 páginasSM3075eir235dAinda não há avaliações
- Rover-Arm Based Coring With Slip: Technological Development and Control ApproachDocumento5 páginasRover-Arm Based Coring With Slip: Technological Development and Control ApproachDivyashree RanganathAinda não há avaliações
- Development and Experimental Validation of An Adaptive Extended Kalman Filter For The Localization of Mobile RobotsDocumento11 páginasDevelopment and Experimental Validation of An Adaptive Extended Kalman Filter For The Localization of Mobile RobotsAnderson OliveiraAinda não há avaliações
- Abid RobotDocumento10 páginasAbid RobotHAFEDH ABIDAinda não há avaliações
- Walking Control Algorithm of Biped Humanoid Robot On Uneven and Inclined FloorDocumento32 páginasWalking Control Algorithm of Biped Humanoid Robot On Uneven and Inclined FloorDiego Fonseca ViannaAinda não há avaliações
- Curvature Based Velocity Control System For Mobile Robot: Pengfei Wang and Kosuke SekiyamaDocumento6 páginasCurvature Based Velocity Control System For Mobile Robot: Pengfei Wang and Kosuke SekiyamaRavi RanjanAinda não há avaliações
- Cuestiones de Robotica: Jose Morisco' Prieto Antonio Luis Caballero Ramirez Juan Antonio Mut 1oz CeciliaDocumento10 páginasCuestiones de Robotica: Jose Morisco' Prieto Antonio Luis Caballero Ramirez Juan Antonio Mut 1oz Cecilialiliana chacanAinda não há avaliações
- Robot For Transmission LineDocumento6 páginasRobot For Transmission LinebhattparthivAinda não há avaliações
- Altium InstallationDocumento3 páginasAltium InstallationUmer_Farooq_1557Ainda não há avaliações
- National Robosprint 2012 by Umer Farooq (President CRG "Case Robotics Group")Documento5 páginasNational Robosprint 2012 by Umer Farooq (President CRG "Case Robotics Group")Umer_Farooq_1557Ainda não há avaliações
- TalalDocumento7 páginasTalalUmer_Farooq_1557Ainda não há avaliações
- Adder LabDocumento1 páginaAdder LabUmer_Farooq_1557Ainda não há avaliações
- Biology Key Stage 4 Lesson PDFDocumento4 páginasBiology Key Stage 4 Lesson PDFAleesha AshrafAinda não há avaliações
- Recruitment SelectionDocumento11 páginasRecruitment SelectionMOHAMMED KHAYYUMAinda não há avaliações
- Random Variables Random Variables - A Random Variable Is A Process, Which When FollowedDocumento2 páginasRandom Variables Random Variables - A Random Variable Is A Process, Which When FollowedsdlfAinda não há avaliações
- Aditya Birla GroupDocumento21 páginasAditya Birla GroupNarendra ThummarAinda não há avaliações
- I I I I: Peroxid.Q!Documento2 páginasI I I I: Peroxid.Q!Diego PradelAinda não há avaliações
- Assignment 4Documento5 páginasAssignment 4Hafiz AhmadAinda não há avaliações
- Moquerio - Defense Mechanism ActivityDocumento3 páginasMoquerio - Defense Mechanism ActivityRoxan MoquerioAinda não há avaliações
- Product Manual 26086 (Revision E) : EGCP-2 Engine Generator Control PackageDocumento152 páginasProduct Manual 26086 (Revision E) : EGCP-2 Engine Generator Control PackageErick KurodaAinda não há avaliações
- Myanmar 1Documento3 páginasMyanmar 1Shenee Kate BalciaAinda não há avaliações
- Civ Beyond Earth HotkeysDocumento1 páginaCiv Beyond Earth HotkeysExirtisAinda não há avaliações
- CS-6777 Liu AbsDocumento103 páginasCS-6777 Liu AbsILLA PAVAN KUMAR (PA2013003013042)Ainda não há avaliações
- 1916 South American Championship Squads - WikipediaDocumento6 páginas1916 South American Championship Squads - WikipediaCristian VillamayorAinda não há avaliações
- Wwii TictactoeDocumento2 páginasWwii Tictactoeapi-557780348Ainda não há avaliações
- 5066452Documento53 páginas5066452jlcheefei9258Ainda não há avaliações
- 82686b - LOAD SHARING MODULEDocumento2 páginas82686b - LOAD SHARING MODULENguyễn Đình ĐứcAinda não há avaliações
- Computers in Industry: Hugh Boyes, Bil Hallaq, Joe Cunningham, Tim Watson TDocumento12 páginasComputers in Industry: Hugh Boyes, Bil Hallaq, Joe Cunningham, Tim Watson TNawabMasidAinda não há avaliações
- Introduction - Livspace - RenoDocumento12 páginasIntroduction - Livspace - RenoMêghnâ BîswâsAinda não há avaliações
- (Campus of Open Learning) University of Delhi Delhi-110007Documento1 página(Campus of Open Learning) University of Delhi Delhi-110007Sahil Singh RanaAinda não há avaliações
- ENT 300 Individual Assessment-Personal Entrepreneurial CompetenciesDocumento8 páginasENT 300 Individual Assessment-Personal Entrepreneurial CompetenciesAbu Ammar Al-hakimAinda não há avaliações
- Antibiotic Zone Interpretation Guide PDFDocumento2 páginasAntibiotic Zone Interpretation Guide PDFFarandy Insan Sejati100% (2)
- 52 - JB CHP Trigen - V01Documento33 páginas52 - JB CHP Trigen - V01July E. Maldonado M.Ainda não há avaliações
- Manual For Tacho Universal Edition 2006: Legal DisclaimerDocumento9 páginasManual For Tacho Universal Edition 2006: Legal DisclaimerboirxAinda não há avaliações