Você também pode gostar
- Desmontaje y montaje de elementos de aluminio. TMVL0309No EverandDesmontaje y montaje de elementos de aluminio. TMVL0309Ainda não há avaliações
- Mando Final, Diferencial de La Dirección y Freno (Lado Izquierdo) - QuitarDocumento9 páginasMando Final, Diferencial de La Dirección y Freno (Lado Izquierdo) - QuitarEver SaavedraAinda não há avaliações
- Cat 11Documento11 páginasCat 11Omar SuazoAinda não há avaliações
- Manual Troqueles Mini Die EspañolDocumento34 páginasManual Troqueles Mini Die EspañolHugo SanchezAinda não há avaliações
- Boom 992kDocumento8 páginasBoom 992kAlexter AyalaAinda não há avaliações
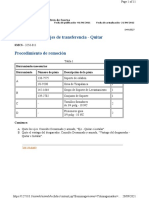
- Desarmado de La Caja de Transferencia - Cargador 950HDocumento8 páginasDesarmado de La Caja de Transferencia - Cargador 950HLUIS ANGEL CURILLA PAUCARAinda não há avaliações
- Quitar Avol de LevasDocumento11 páginasQuitar Avol de Levascadir tejadaAinda não há avaliações
- Partes RR-RD 5700 CrownDocumento366 páginasPartes RR-RD 5700 Crownmilton apraezAinda não há avaliações
- Procedimiento Armado Mando Final D10T2Documento10 páginasProcedimiento Armado Mando Final D10T2Claudio MuñozAinda não há avaliações
- Lorad Elite Manual de ServicioDocumento188 páginasLorad Elite Manual de Serviciokizen_5100% (11)
- Tandem y Tapa Quitar e InstalarDocumento5 páginasTandem y Tapa Quitar e InstalarJUAN PABLOAinda não há avaliações
- Manual Unidad Dental KnightDocumento17 páginasManual Unidad Dental KnightJose Alberto Martinez100% (1)
- Trench - BushingDocumento8 páginasTrench - BushingLuis Brandao100% (1)
- Ste 18 D Ste 23 D EspanolDocumento23 páginasSte 18 D Ste 23 D EspanolMiguel Angel Timana MendozaAinda não há avaliações
- Cubos de EjeDocumento50 páginasCubos de EjeLiliana Rebeca Santos santos100% (2)
- Manual Instalación Armado y DesarmadoDocumento42 páginasManual Instalación Armado y DesarmadoVicente Elías Venegas Luna50% (2)
- Diferencial BticinoDocumento11 páginasDiferencial BticinoDino J. Flores BasilioAinda não há avaliações
- 09 Transmisión - DesmontarDocumento66 páginas09 Transmisión - DesmontarWilder OportoAinda não há avaliações
- Mando Final Derecho RemoverDocumento5 páginasMando Final Derecho RemoverEver SaavedraAinda não há avaliações
- GT5 4toDocumento9 páginasGT5 4toA&A E&P0% (1)
- Curso Entrega RetroexcavadorasDocumento153 páginasCurso Entrega RetroexcavadorasAlexander Calua100% (2)
- Proyect Integrator 2019-2 DarrieusDocumento23 páginasProyect Integrator 2019-2 DarrieusGonzalo Veliz AtenciaAinda não há avaliações
- Estribadora ALBA D24L PDFDocumento26 páginasEstribadora ALBA D24L PDFHugo Fernandez Ceron50% (2)
- SIS 2.0 Moto 4087 Desarme Caja de Frenos.Documento6 páginasSIS 2.0 Moto 4087 Desarme Caja de Frenos.epsa2200Ainda não há avaliações
- 34065EK - Árbol de Levas - DesensambleDocumento6 páginas34065EK - Árbol de Levas - DesensambleMiguel MarineroAinda não há avaliações
- Unidad de Rotación L10-HelacDocumento32 páginasUnidad de Rotación L10-Helaccesar franz napaico perezAinda não há avaliações
- Mejora Valvula Freno Dumper Caterpillar 730Documento11 páginasMejora Valvula Freno Dumper Caterpillar 730Edwin VacaAinda não há avaliações
- D519 Sensor de AnguloDocumento6 páginasD519 Sensor de AnguloxqnaduAinda não há avaliações
- 420F Backhoe Loader LTG00001-02342 (MACHINE) POWERED BY C4.4 Engine (SEBP5945 - 38) - Brazo ProcedimientoDocumento6 páginas420F Backhoe Loader LTG00001-02342 (MACHINE) POWERED BY C4.4 Engine (SEBP5945 - 38) - Brazo ProcedimientoDiego Jose Tocto GuzmamAinda não há avaliações
- Smcs Reparacion Convertidor d8tDocumento73 páginasSmcs Reparacion Convertidor d8tJose Alberto Izquiel100% (1)
- Remocion de TransmicionDocumento4 páginasRemocion de TransmicionAlbertoAinda não há avaliações
- 11 Válvula de Control de Flujo - Quitar e InstalarDocumento7 páginas11 Válvula de Control de Flujo - Quitar e InstalarWilder OportoAinda não há avaliações
- Manual de Taller SHB 6502wd Es 22267Documento162 páginasManual de Taller SHB 6502wd Es 22267H.A. OmarAinda não há avaliações
- Manual Técnico de Transmisor OLCT60Documento39 páginasManual Técnico de Transmisor OLCT60Luy GuillenAinda não há avaliações
- ALBUMDocumento47 páginasALBUMakameAinda não há avaliações
- Giador de CadenaDocumento4 páginasGiador de Cadenajuan castaedaAinda não há avaliações
- Instalacion NAV E46 Espanol PDFDocumento17 páginasInstalacion NAV E46 Espanol PDFangeltavAinda não há avaliações
- 777G - Diferencial - RemociónDocumento7 páginas777G - Diferencial - RemociónJuanAinda não há avaliações
- Manual de Instrucciones: Inocart VT, Inocart HDocumento51 páginasManual de Instrucciones: Inocart VT, Inocart HDiego Acosta mendezAinda não há avaliações
- Tablero de Instrumentos: ContenidosDocumento18 páginasTablero de Instrumentos: ContenidosGarikoitz FranciscoeneAinda não há avaliações
- AudiTT 220 Roadster (Castella) PDFDocumento32 páginasAudiTT 220 Roadster (Castella) PDFPaulo RodriguesAinda não há avaliações
- Cojinetes de La Leva RemoverDocumento2 páginasCojinetes de La Leva RemoverAlejandro ValenzuelaAinda não há avaliações
- Service Manual SP PDFDocumento350 páginasService Manual SP PDFPercy Moreno BozzetaAinda não há avaliações
- Sierra de Cinta para Metal 1100 W (LIDLONLINE-322848 - ES)Documento63 páginasSierra de Cinta para Metal 1100 W (LIDLONLINE-322848 - ES)Juan Jimeno100% (1)
- Arme RetardatorDocumento7 páginasArme RetardatorUilmerKrdenasAinda não há avaliações
- Manual Operador RTK Normativa Trabajo CampoDocumento82 páginasManual Operador RTK Normativa Trabajo Campovulcano1955Ainda não há avaliações
- Desarmado y Armado de Actuadores - CilindroDocumento37 páginasDesarmado y Armado de Actuadores - CilindroRumy Rayen Ruca Yagua20% (5)
- Caja Cambios 11.180 PDFDocumento109 páginasCaja Cambios 11.180 PDFronald monjes100% (1)
- Brava One BF - enDocumento124 páginasBrava One BF - enAlb2222Ainda não há avaliações
- DF 3Documento5 páginasDF 3miltonAinda não há avaliações
- Proc Desmontar Mando Moto 11Documento2 páginasProc Desmontar Mando Moto 11Cristian ZarricuetaAinda não há avaliações
- Caja de Cambios Automática ZFDocumento34 páginasCaja de Cambios Automática ZFMTK2016100% (3)
- Traducido .Documento24 páginasTraducido .Estefany Gabriela PazAinda não há avaliações
- 320D & 320D L Excavators A8F00001Documento4 páginas320D & 320D L Excavators A8F00001german gualavisiAinda não há avaliações
- Bomba FanDocumento6 páginasBomba FanSERTECC SASAinda não há avaliações
- Procedimiento Desmontaje Transmision Cat 140hDocumento4 páginasProcedimiento Desmontaje Transmision Cat 140hVladimir RiveraAinda não há avaliações
- Instrucciones Transpaleta AY 2500 THN y AY 2500 THV 2017 1Documento15 páginasInstrucciones Transpaleta AY 2500 THN y AY 2500 THV 2017 1Nemer OjedaAinda não há avaliações
- C175-16 AftercoolerDocumento5 páginasC175-16 Aftercoolerjordan navarroAinda não há avaliações
- Orbitrol QuitarDocumento7 páginasOrbitrol QuitarAlejandro ValenzuelaAinda não há avaliações
- Informe Final Formulación y Evaluación de Proyecto de NegocioDocumento19 páginasInforme Final Formulación y Evaluación de Proyecto de NegocioStephany Carolina Franco CortésAinda não há avaliações
- Operating Manual (Avh-P4250dvd - Avh-P3250dvd - Avh-P3250bt) - Esp PDFDocumento104 páginasOperating Manual (Avh-P4250dvd - Avh-P3250dvd - Avh-P3250bt) - Esp PDFCesar Zarate RojasAinda não há avaliações
- Manual AA Toshiba OM - MMK-AP - 7HP-E (1) - (50-70-90-120) - ESDocumento34 páginasManual AA Toshiba OM - MMK-AP - 7HP-E (1) - (50-70-90-120) - ESMiranda GrandAinda não há avaliações
- DECODIFICADOR ZTE ZXV10 B710S2-A34 - Hispansat RevisadoDocumento11 páginasDECODIFICADOR ZTE ZXV10 B710S2-A34 - Hispansat RevisadoManuel100% (1)
- Manual Mobi Esp2021Documento242 páginasManual Mobi Esp2021Mario CanteliAinda não há avaliações
- Modelo HLE3214DDocumento48 páginasModelo HLE3214Divaknesio troglodisAinda não há avaliações
- Reset en Equipos de Sonido SonyDocumento6 páginasReset en Equipos de Sonido SonyFrancisco LopezAinda não há avaliações
- Procedimiento Actualización de FW Modelos SMART BGH 1328 PDFDocumento3 páginasProcedimiento Actualización de FW Modelos SMART BGH 1328 PDFfabibru7629% (17)
- Manual de Uso Inverter Fit 17Documento32 páginasManual de Uso Inverter Fit 17ernesto garzaAinda não há avaliações
- 0081 Catalogo Phaeton Web 02Documento25 páginas0081 Catalogo Phaeton Web 02Francisco javierAinda não há avaliações
- 68b007023 Maninst SPL BGH Inverter GU1Documento65 páginas68b007023 Maninst SPL BGH Inverter GU1mdcarraro100% (1)
- E4b78-D37ee-Procedimiento de Actualizacion Soyea hdp160 PDFDocumento4 páginasE4b78-D37ee-Procedimiento de Actualizacion Soyea hdp160 PDFJorge Luis Puty100% (1)
- C Exp Arc1010h Gp7 Rev1.0 EspaDocumento52 páginasC Exp Arc1010h Gp7 Rev1.0 EspaAlejandroAinda não há avaliações
- Servicio en La Etapa de Salida de Audio en MinicomponentesDocumento8 páginasServicio en La Etapa de Salida de Audio en MinicomponentesJose PadronAinda não há avaliações
- GUIA05Documento28 páginasGUIA05RamonMartinezCatalaAinda não há avaliações
- Android-Tv ORANGEDocumento21 páginasAndroid-Tv ORANGEPedroDiazAinda não há avaliações
- Manual Led Linea f50Documento28 páginasManual Led Linea f50Ivan Felipe Huaracha CruzAinda não há avaliações
- Cud 900 ManDocumento2 páginasCud 900 ManGabi ReyesAinda não há avaliações
- Tornado 2018 ManualDocumento199 páginasTornado 2018 ManualJuan Hernandez100% (2)
- In Movi Liz AdoresDocumento362 páginasIn Movi Liz Adoresjrpp100% (18)
- Manual Chevrolet OnixDocumento298 páginasManual Chevrolet OnixJorge Girbau67% (3)
- Manual Zafira 2009 Es PDFDocumento246 páginasManual Zafira 2009 Es PDFJosé100% (1)
- ZENITH Healthview - h20j55dt (ES)Documento64 páginasZENITH Healthview - h20j55dt (ES)Marly Salas GonzalezAinda não há avaliações
- 28 MT48BF-PMDocumento36 páginas28 MT48BF-PMSoulPower789100% (1)
- Manual PC Packard Bell PDFDocumento68 páginasManual PC Packard Bell PDFEnrique Fernandez100% (1)
- Onkyo Manual - TX-SR313 - EspañolDocumento68 páginasOnkyo Manual - TX-SR313 - Españoldavicom0437Ainda não há avaliações
- TV Remote ManualDocumento2 páginasTV Remote ManualMed royAinda não há avaliações
- Manual en Español HDL NXT-R PDFDocumento6 páginasManual en Español HDL NXT-R PDFMFT_CORPAinda não há avaliações
- Comunicacion Por InfrarrojosDocumento70 páginasComunicacion Por InfrarrojosNoe Minga CalderonAinda não há avaliações
- Automatización de Accesos y Techos MóvilesDocumento19 páginasAutomatización de Accesos y Techos MóvilesLUIS GERARDO PAREDES ALDERETEAinda não há avaliações