Você também pode gostar
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (894)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- Anthropometric Methods ROEBUCKDocumento93 páginasAnthropometric Methods ROEBUCKRi RuAinda não há avaliações
- Computer Science Department: Lab ManualDocumento58 páginasComputer Science Department: Lab ManualShahad AlharthyAinda não há avaliações
- Muller's Method Root Finding Exercise for Cos(x)-xe^x FunctionDocumento27 páginasMuller's Method Root Finding Exercise for Cos(x)-xe^x FunctionChillie Bronzal UllamotAinda não há avaliações
- Csat 11Documento52 páginasCsat 11Mossad NewsAinda não há avaliações
- Directed Energy WeaponsDocumento368 páginasDirected Energy WeaponsPete Santilli100% (1)
- Nonlethal Weapons and CapabilitiesDocumento74 páginasNonlethal Weapons and Capabilitiesbingwazzup100% (2)
- Non-Lethal Weaponry: Applications To Ac-130 GunshipsDocumento36 páginasNon-Lethal Weaponry: Applications To Ac-130 Gunshipsbingwazzup100% (1)
- The Invisible Third World War by W. H. Bowart and Richard SuttonDocumento35 páginasThe Invisible Third World War by W. H. Bowart and Richard Suttonhisroyalslynessone2funkAinda não há avaliações
- An Investigation On The Physiological and Psychological Effects of Infrasound On PersonsDocumento6 páginasAn Investigation On The Physiological and Psychological Effects of Infrasound On Personsbingwazzup100% (1)
- Auditory Response To Pulsed Radiofrequency EnergyDocumento12 páginasAuditory Response To Pulsed Radiofrequency Energybingwazzup100% (1)
- Behavioral and Cognitive Effects of Microwave ExposureDocumento24 páginasBehavioral and Cognitive Effects of Microwave Exposurebingwazzup100% (1)
- Ip Multicast Part1Documento18 páginasIp Multicast Part1Pallab PalAinda não há avaliações
- Implementing A Digital Tracker For Monopulse Radar Using The TMS320C40 DSPDocumento26 páginasImplementing A Digital Tracker For Monopulse Radar Using The TMS320C40 DSPbingwazzupAinda não há avaliações
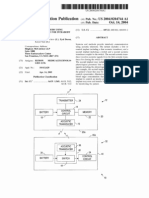
- Remote Mobile Monitoring and Communications Systems (US Patent # 5870029)Documento7 páginasRemote Mobile Monitoring and Communications Systems (US Patent # 5870029)bingwazzup100% (1)
- Model of A Monopulse Radar Tracking System For Student LaboratoryDocumento6 páginasModel of A Monopulse Radar Tracking System For Student Laboratorybingwazzup100% (1)
- The Use of RFID For Human Identification A DRAFT REPORT From DHS Emerging Applications and Technology SubcommitteeDocumento14 páginasThe Use of RFID For Human Identification A DRAFT REPORT From DHS Emerging Applications and Technology SubcommitteespectabearAinda não há avaliações
- A Low-Cost Approach To FMCW Radar: Through-Wall Microwatt RadarDocumento28 páginasA Low-Cost Approach To FMCW Radar: Through-Wall Microwatt Radarbingwazzup100% (1)
- Ultrasonic Interrogating System and Exciter-Detector Circuit ThereforDocumento12 páginasUltrasonic Interrogating System and Exciter-Detector Circuit ThereforbingwazzupAinda não há avaliações
- DEW Electromagnetic SpectrumDocumento3 páginasDEW Electromagnetic SpectrumbingwazzupAinda não há avaliações
- Random Noise Monopulse Radar System For Covert Tracking of TargetsDocumento10 páginasRandom Noise Monopulse Radar System For Covert Tracking of TargetsbingwazzupAinda não há avaliações
- Apparatus and Methods Using Acoustic Telemetry For Intrabody CommunicationsDocumento18 páginasApparatus and Methods Using Acoustic Telemetry For Intrabody CommunicationsbingwazzupAinda não há avaliações
- Aerial Laser ScanningDocumento244 páginasAerial Laser Scanningbingwazzup100% (1)
- The Radio Armateur Microwave Communications HandbookDocumento192 páginasThe Radio Armateur Microwave Communications HandbookRapee Dev100% (1)
- Frequency Choice For Radio Telemetry: HF-vs-VHF-ConundrumDocumento7 páginasFrequency Choice For Radio Telemetry: HF-vs-VHF-Conundrumbingwazzup100% (1)
- An Overview of Acoustic TelemetryDocumento11 páginasAn Overview of Acoustic TelemetrybingwazzupAinda não há avaliações
- Radio Direction FinderDocumento78 páginasRadio Direction Finderbingwazzup100% (1)
- An Investigation On The Physiological and Psychological Effects of Infrasound On PersonsDocumento6 páginasAn Investigation On The Physiological and Psychological Effects of Infrasound On Personsbingwazzup100% (1)
- Model of A Monopulse Radar Tracking System For Student LaboratoryDocumento6 páginasModel of A Monopulse Radar Tracking System For Student Laboratorybingwazzup100% (1)
- Apparatus and Methods Using Acoustic Telemetry For Intrabody CommunicationsDocumento18 páginasApparatus and Methods Using Acoustic Telemetry For Intrabody CommunicationsbingwazzupAinda não há avaliações
- Implementing A Digital Tracker For Monopulse Radar Using The TMS320C40 DSPDocumento26 páginasImplementing A Digital Tracker For Monopulse Radar Using The TMS320C40 DSPbingwazzupAinda não há avaliações
- Random Noise Monopulse Radar System For Covert Tracking of TargetsDocumento10 páginasRandom Noise Monopulse Radar System For Covert Tracking of TargetsbingwazzupAinda não há avaliações
- An Overview of Acoustic TelemetryDocumento11 páginasAn Overview of Acoustic TelemetrybingwazzupAinda não há avaliações
- Infra SoundDocumento7 páginasInfra Soundbingwazzup100% (1)
- NetSim 9 User ManualDocumento40 páginasNetSim 9 User ManualJose Miguel GuzmanAinda não há avaliações
- Window Air ConditionerDocumento8 páginasWindow Air ConditionerHimanshu UpadhyayAinda não há avaliações
- Introduction To Information SystemDocumento23 páginasIntroduction To Information Systemahmeddhshory077Ainda não há avaliações
- Isom ReviewerDocumento35 páginasIsom ReviewerKristian UyAinda não há avaliações
- Navigation & SelectionDocumento2 páginasNavigation & SelectionPranayAinda não há avaliações
- Pertemuan 13 Pemrograman Web 2Documento6 páginasPertemuan 13 Pemrograman Web 2Rava satriyaAinda não há avaliações
- Mail Merge: How to Send Personalized Letters in WordDocumento15 páginasMail Merge: How to Send Personalized Letters in WordKaku Ghoshal100% (1)
- Basic UsersguideDocumento10 páginasBasic UsersguidekapukapucarAinda não há avaliações
- 2 N 3820Documento3 páginas2 N 3820Ariel NavarreteAinda não há avaliações
- Chapter-5-Working With Typical Operating System BookbackanswerDocumento5 páginasChapter-5-Working With Typical Operating System BookbackanswervenusrinivassAinda não há avaliações
- fx-CG50 Soft EN PDFDocumento662 páginasfx-CG50 Soft EN PDFSaksham RanjanAinda não há avaliações
- Syngo Fastview Vx57E: Release NoteDocumento4 páginasSyngo Fastview Vx57E: Release NoteAlexis RafaelAinda não há avaliações
- MNO 4G LTE Security PerspectivesDocumento9 páginasMNO 4G LTE Security PerspectivesTzvika ShechoriAinda não há avaliações
- VCarve Post Processor GuideDocumento37 páginasVCarve Post Processor GuidefertobyAinda não há avaliações
- CertyIQ AZ-900 UpdatedExam Dumps - 2022 Part 3Documento29 páginasCertyIQ AZ-900 UpdatedExam Dumps - 2022 Part 3Marcio ArrudaAinda não há avaliações
- Credit Card Fraud Detection System Using CNNDocumento7 páginasCredit Card Fraud Detection System Using CNNIJRASETPublicationsAinda não há avaliações
- 486 Sps 103Documento61 páginas486 Sps 103Samuel MarquezAinda não há avaliações
- Paying Guest ManagementDocumento60 páginasPaying Guest ManagementVISHNU KAinda não há avaliações
- FlyWithLua NG Debug LogDocumento24 páginasFlyWithLua NG Debug LogMarcelo ReAinda não há avaliações
- Chap 03Documento26 páginasChap 03Amrutha RajeshAinda não há avaliações
- IoT-Based Smart Parking Management SystemDocumento6 páginasIoT-Based Smart Parking Management SystemInternational Journal of Innovative Science and Research TechnologyAinda não há avaliações
- Muxed Home IntercomDocumento7 páginasMuxed Home IntercomalanAinda não há avaliações
- Ipad ProposalDocumento3 páginasIpad ProposalAmie Botak100% (1)
- Fi 6110 DatasheetDocumento2 páginasFi 6110 DatasheetJesus RoldanAinda não há avaliações
- N270L3Documento6 páginasN270L3hotfuryAinda não há avaliações
- Resume With Experience PDFDocumento2 páginasResume With Experience PDFVinay ReddyAinda não há avaliações
- Manasa Tatavarthy: E-Mail: MobileDocumento4 páginasManasa Tatavarthy: E-Mail: MobileDivya SushmaAinda não há avaliações