Você também pode gostar
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Sound Insulation and Noise ControlDocumento25 páginasSound Insulation and Noise ControlJoe AyeAinda não há avaliações
- AUTOSAR Specification of CAN Driver Ver 4.0.0 PDFDocumento101 páginasAUTOSAR Specification of CAN Driver Ver 4.0.0 PDFJoshwa2elAinda não há avaliações
- 3D Modelling Environment For Plant Design - PDMSDocumento11 páginas3D Modelling Environment For Plant Design - PDMSDayo IdowuAinda não há avaliações
- Roofing with Burlington slates design guideDocumento20 páginasRoofing with Burlington slates design guideAFW111Ainda não há avaliações
- Front AccountingDocumento2 páginasFront AccountingVamsi KrishnaAinda não há avaliações
- Din 1045-1 ManualDocumento82 páginasDin 1045-1 ManualdoomrinAinda não há avaliações
- How2 Calulate Deflections Using EC2Documento8 páginasHow2 Calulate Deflections Using EC2Amro Ahmad AliAinda não há avaliações
- List Game SoftwareDocumento204 páginasList Game SoftwareApriyana0% (1)
- Trinidad Barangay Evaluation Criteria & ConsolidationDocumento14 páginasTrinidad Barangay Evaluation Criteria & Consolidationapi-19750334Ainda não há avaliações
- 1417 Vol Ii, Part 2Documento180 páginas1417 Vol Ii, Part 2Mahroof Bin ShajahanAinda não há avaliações
- CFPA E Guideline No 19 2009 EVACUATION FROM BUILDINGS PDFDocumento99 páginasCFPA E Guideline No 19 2009 EVACUATION FROM BUILDINGS PDFodemircioglu2Ainda não há avaliações
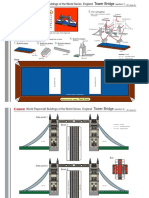
- World Papercraft Buildings of The World Series England: (Section 1)Documento3 páginasWorld Papercraft Buildings of The World Series England: (Section 1)GregAinda não há avaliações
- All Products BrochureDocumento16 páginasAll Products BrochureArmandoMiquilenaAinda não há avaliações
- Sheet 1Documento1 páginaSheet 1Jay SenjaliaAinda não há avaliações
- Install Contour Storyteller LogDocumento3 páginasInstall Contour Storyteller Logseiken771Ainda não há avaliações
- Pozzolith 80 PDFDocumento2 páginasPozzolith 80 PDFDoby YuniardiAinda não há avaliações
- English 50/HIS/2 SET: Code NoDocumento12 páginasEnglish 50/HIS/2 SET: Code NoNavneet Kumar SinghAinda não há avaliações
- Design Optimization of Industrial Portal PDFDocumento6 páginasDesign Optimization of Industrial Portal PDFVassil VassilevAinda não há avaliações
- PDH Multiplexing PrinciplesDocumento14 páginasPDH Multiplexing PrinciplesMogeni G MogeniAinda não há avaliações
- Mini Trunking For CableDocumento12 páginasMini Trunking For CableSteven HungAinda não há avaliações
- Catalogue Standard Air Handling Units Blauair PDFDocumento24 páginasCatalogue Standard Air Handling Units Blauair PDFIonut CatalinAinda não há avaliações
- Oratorium Lighting Proposal Jesus ZuluagaDocumento0 páginaOratorium Lighting Proposal Jesus ZuluagaJesus David ZuluagaAinda não há avaliações
- An Overview of On-Chip BusesDocumento25 páginasAn Overview of On-Chip BusesSreekanth PagadapalliAinda não há avaliações
- MikrotikDocumento3 páginasMikrotikTudeAinda não há avaliações
- Develop Android Apps Using AndroidDocumento1 páginaDevelop Android Apps Using AndroidHaseeb MogralAinda não há avaliações
- Manual de Board ASrock P55 DeluxeDocumento75 páginasManual de Board ASrock P55 Deluxeanon_530716820Ainda não há avaliações
- Zaha HadidDocumento48 páginasZaha Hadiddami100% (1)
- Lo 2 - DemolitionDocumento29 páginasLo 2 - DemolitionEng Stephen ArendeAinda não há avaliações
- Jail and Prison PlumbingDocumento7 páginasJail and Prison PlumbingRhea Antonette DiazAinda não há avaliações
- Royal Plaza DraftDocumento4 páginasRoyal Plaza Draftssjk2008Ainda não há avaliações