Você também pode gostar
- ARM Microcontrollers Programming for Embedded SystemsNo EverandARM Microcontrollers Programming for Embedded SystemsNota: 5 de 5 estrelas5/5 (1)
- CANopen Dictionary v7Documento67 páginasCANopen Dictionary v7bozzec100% (1)
- OpenFlow Circuit Switch Specification v0.3Documento16 páginasOpenFlow Circuit Switch Specification v0.3Dostojev_84Ainda não há avaliações
- ASAM - AE - MCD 1 XCP - AS - Ethernet Transport Layer - V1 5 0Documento33 páginasASAM - AE - MCD 1 XCP - AS - Ethernet Transport Layer - V1 5 0cruse201550% (2)
- TransformerDocumento30 páginasTransformerAnonymous TVdKmk100% (2)
- 3500 22m Transient Data Interface Manual 161580-01 PDFDocumento82 páginas3500 22m Transient Data Interface Manual 161580-01 PDFkatja kafka100% (1)
- TTC 1000Documento2 páginasTTC 1000svismaelAinda não há avaliações
- Philips LPC2000 CAN Driver: Rev. 01 - 02 March 2006 Application NoteDocumento38 páginasPhilips LPC2000 CAN Driver: Rev. 01 - 02 March 2006 Application NoteRafik CherniAinda não há avaliações
- BL Micro NXP Microcontroller Overview3Documento2 páginasBL Micro NXP Microcontroller Overview3Balaji PotnuriAinda não há avaliações
- An 10438Documento38 páginasAn 10438szczupi87Ainda não há avaliações
- IoT in Five Days - v1.1 20160627 (1) - 1-160-128-136Documento9 páginasIoT in Five Days - v1.1 20160627 (1) - 1-160-128-136pham phuAinda não há avaliações
- An 10744Documento22 páginasAn 10744Bojana ĐukićAinda não há avaliações
- Air Interface ProtocolsDocumento22 páginasAir Interface ProtocolsmetootheskullAinda não há avaliações
- CAN - A Brief Tutorial: Nuts and BoltsDocumento4 páginasCAN - A Brief Tutorial: Nuts and Boltsmailtomyidyaar98100% (1)
- SocketCAN, The Official CAN API of The Linux KernelDocumento6 páginasSocketCAN, The Official CAN API of The Linux KernelTice HarmanAinda não há avaliações
- Can Bus Standalone ControllerDocumento24 páginasCan Bus Standalone ControllerDoan Van TuanAinda não há avaliações
- Application NoteDocumento24 páginasApplication NotePopovici Paul100% (1)
- STM32F7 Peripheral BxCANDocumento13 páginasSTM32F7 Peripheral BxCANfebrian naufalAinda não há avaliações
- Agenda Item: Source: Title: Use of RLC Mode For RRC Messages Document ForDocumento6 páginasAgenda Item: Source: Title: Use of RLC Mode For RRC Messages Document ForsatyamuraliutlAinda não há avaliações
- Philips ARM LPC Microcontroller Family: Rev. 02 - 25 October 2004 Application NoteDocumento18 páginasPhilips ARM LPC Microcontroller Family: Rev. 02 - 25 October 2004 Application NoteRoberAinda não há avaliações
- Computer Solutions LTD: CAN - A Brief TutorialDocumento7 páginasComputer Solutions LTD: CAN - A Brief Tutorialhitech_emi3591Ainda não há avaliações
- Design of The CAN Bus Booster Pack and The Implementation of The CAN Protocol On The TIVA C Launch Pad Evaluation BoardDocumento5 páginasDesign of The CAN Bus Booster Pack and The Implementation of The CAN Protocol On The TIVA C Launch Pad Evaluation BoardSrihari vAinda não há avaliações
- CAN TutorialDocumento22 páginasCAN TutorialNaveen BasavarajacharAinda não há avaliações
- CAN TutorialDocumento22 páginasCAN TutorialApoorva BhattAinda não há avaliações
- An Implementation and Experimental Study of The Explicit Control Protocol (XCP) by Yongguang ZhangDocumento54 páginasAn Implementation and Experimental Study of The Explicit Control Protocol (XCP) by Yongguang ZhangErma PerendaAinda não há avaliações
- AN3312Documento20 páginasAN3312Marcelo CintraAinda não há avaliações
- Data Link: Systems OperationDocumento6 páginasData Link: Systems OperationGabriel Paco LunaAinda não há avaliações
- Lte BibleDocumento307 páginasLte BibleNik100% (3)
- 00945a - A CANopen Stack For PIC18 ECAN MicrocontrollersDocumento58 páginas00945a - A CANopen Stack For PIC18 ECAN MicrocontrollersFernando PeixeiroAinda não há avaliações
- CAN Hardware DtailsDocumento21 páginasCAN Hardware DtailsratheeshbrAinda não há avaliações
- C WINDOWS TEMP Plugtmp-29 Plugin-Sprp501Documento31 páginasC WINDOWS TEMP Plugtmp-29 Plugin-Sprp501Ekwere Wilfred UdohAinda não há avaliações
- AN1077 Application Note: Overview of Enhanced Can Controllers For St7 and St9 McusDocumento14 páginasAN1077 Application Note: Overview of Enhanced Can Controllers For St7 and St9 McusAlexAinda não há avaliações
- EC312 CAN Intro 1of2Documento18 páginasEC312 CAN Intro 1of2Elvis Julca HerreraAinda não há avaliações
- Microchip TCP/IP Lite Stack: Authors: Janaki Kuruganti, Alin Stoicescu, Marius Cristea, Microchip Technology IncDocumento30 páginasMicrochip TCP/IP Lite Stack: Authors: Janaki Kuruganti, Alin Stoicescu, Marius Cristea, Microchip Technology IncCarlos Daniel Rodriguez100% (1)
- Networks Chapter 2Documento20 páginasNetworks Chapter 2Sanjay H MAinda não há avaliações
- Vehicle Buses Electronics ComponentsDocumento5 páginasVehicle Buses Electronics ComponentsMustafa Özdemir100% (1)
- AfriCell Day 2Documento40 páginasAfriCell Day 2Nijad NasrAinda não há avaliações
- Cdot An-RaxDocumento46 páginasCdot An-Raxneeraj kumar singh100% (2)
- Stand-Alone CAN Controller With SPI Interface: Features DescriptionDocumento84 páginasStand-Alone CAN Controller With SPI Interface: Features DescriptionjismagicAinda não há avaliações
- An5416 Spc58ec Can Bus Configuration StmicroelectronicsDocumento42 páginasAn5416 Spc58ec Can Bus Configuration StmicroelectronicsAlikhan YessalyAinda não há avaliações
- WRAN Protocol Stack: Control Plane Between UE and RNCDocumento2 páginasWRAN Protocol Stack: Control Plane Between UE and RNChamidboulahiaAinda não há avaliações
- Interface Products Design Guide Using CAN, LIN and Infrared ConnectivityDocumento12 páginasInterface Products Design Guide Using CAN, LIN and Infrared Connectivitymayais00Ainda não há avaliações
- MCES Group ActivityDocumento55 páginasMCES Group ActivitykartiksdanAinda não há avaliações
- AN-ISC-8-1095 CRC Check With CANbedded CAN StackDocumento8 páginasAN-ISC-8-1095 CRC Check With CANbedded CAN Stackqplygxlj9Ainda não há avaliações
- TCP ManDocumento17 páginasTCP ManGiovany RosalesAinda não há avaliações
- Time-Triggered CAN Protocol OverviewDocumento26 páginasTime-Triggered CAN Protocol OverviewPadmaja VenkataramanAinda não há avaliações
- RAN1637 - High Speed Cell - FACH (DL)Documento23 páginasRAN1637 - High Speed Cell - FACH (DL)christian100% (1)
- Barré2011 Chapter MultiPathTCPFromTheoryToPractiDocumento14 páginasBarré2011 Chapter MultiPathTCPFromTheoryToPractiMAIZIA SARAHAinda não há avaliações
- An-InD-1-004 Diagnostics Via Gateway in CANoeDocumento80 páginasAn-InD-1-004 Diagnostics Via Gateway in CANoeUpendra VaddeAinda não há avaliações
- MCP2515 PDFDocumento84 páginasMCP2515 PDFHector SanchezAinda não há avaliações
- Interfacing The 8051 With 2-Wire Serial EepromsDocumento12 páginasInterfacing The 8051 With 2-Wire Serial EepromsNusret YılmazAinda não há avaliações
- 6v102 PDFDocumento16 páginas6v102 PDFtetrapoltestAinda não há avaliações
- Philips UtilityDocumento14 páginasPhilips UtilityRavikumar RangaswamyAinda não há avaliações
- Pic 32 CanDocumento100 páginasPic 32 CanNikola PerencevicAinda não há avaliações
- A Solution For Improving TCP Performance Over Wireless LinksDocumento12 páginasA Solution For Improving TCP Performance Over Wireless LinksBirsh EndawkieAinda não há avaliações
- Ip Services and Port Numbers: Alcatel Omnipcx EnterpriseDocumento12 páginasIp Services and Port Numbers: Alcatel Omnipcx EnterpriseAriel BecerraAinda não há avaliações
- Uart Spi I2cDocumento17 páginasUart Spi I2cestraj1954100% (1)
- LPC 2148 UserDocumento348 páginasLPC 2148 UserpavankrishnatAinda não há avaliações
- Iub TX Configuration Recommendation - ATM RAN14 V1.1Documento94 páginasIub TX Configuration Recommendation - ATM RAN14 V1.1BegumKarabatakAinda não há avaliações
- LEARN MPLS FROM SCRATCH PART-B: A Beginners guide to next level of networkingNo EverandLEARN MPLS FROM SCRATCH PART-B: A Beginners guide to next level of networkingAinda não há avaliações
- LTE Signaling: Troubleshooting and Performance MeasurementNo EverandLTE Signaling: Troubleshooting and Performance MeasurementAinda não há avaliações
- nRF52810 PB v2.1Documento2 páginasnRF52810 PB v2.1Clyde CauchiAinda não há avaliações
- Stepper Motor Control Using The PIC16F684Documento12 páginasStepper Motor Control Using The PIC16F684edward_conzaAinda não há avaliações
- CT Testing TheoryDocumento15 páginasCT Testing TheoryClyde CauchiAinda não há avaliações
- CTTestingTheory PDFDocumento53 páginasCTTestingTheory PDFjengandxbAinda não há avaliações
- Adept Application User's Manual PDFDocumento9 páginasAdept Application User's Manual PDFClyde CauchiAinda não há avaliações
- CT Testing TheoryDocumento25 páginasCT Testing TheoryClyde CauchiAinda não há avaliações
- 74HC151 74HCT151: 1. General DescriptionDocumento19 páginas74HC151 74HCT151: 1. General DescriptionClyde CauchiAinda não há avaliações
- Reloj DigitalDocumento14 páginasReloj DigitalsegundosAinda não há avaliações
- AN557 - Four-Channel Digital Voltmeter With Display and Keyboard - MicrochipDocumento30 páginasAN557 - Four-Channel Digital Voltmeter With Display and Keyboard - MicrochipRicardo BessaAinda não há avaliações
- LVDS SERDES Transmitter / Receiver IP Cores User Guide: Updated For Intel Quartus Prime Design Suite: 17.1Documento56 páginasLVDS SERDES Transmitter / Receiver IP Cores User Guide: Updated For Intel Quartus Prime Design Suite: 17.1Clyde CauchiAinda não há avaliações
- Unit 4 Ee336Documento31 páginasUnit 4 Ee336Satya Sudhakar RasamsettiAinda não há avaliações
- Transformer StudyDocumento256 páginasTransformer StudysulemankhalidAinda não há avaliações
- Transformer StudyDocumento256 páginasTransformer StudysulemankhalidAinda não há avaliações
- Cyclone® V Device Family Pin Connection Guidelines PCG-01014-2.8Documento70 páginasCyclone® V Device Family Pin Connection Guidelines PCG-01014-2.8Clyde CauchiAinda não há avaliações
- Healthcare Radisys Medical Imaging StudyDocumento4 páginasHealthcare Radisys Medical Imaging StudyClyde CauchiAinda não há avaliações
- CTTestingTheory PDFDocumento53 páginasCTTestingTheory PDFjengandxbAinda não há avaliações
- J Neurol Neurosurg Psychiatry 2005 Smith Ii2 7Documento7 páginasJ Neurol Neurosurg Psychiatry 2005 Smith Ii2 7Eka Satria AnanditaAinda não há avaliações
- Brain-Computer Interfaces For Communication and RehabilitationDocumento13 páginasBrain-Computer Interfaces For Communication and RehabilitationClyde CauchiAinda não há avaliações
- Termocople Tipo TDocumento2 páginasTermocople Tipo TArturo RamirezAinda não há avaliações
- PCB Assembly REFERENCEDocumento17 páginasPCB Assembly REFERENCEClyde CauchiAinda não há avaliações
- THDB-HTG Rev BDocumento1 páginaTHDB-HTG Rev BClyde CauchiAinda não há avaliações
- 50996034X2RM - Principles of Control Systems - Solution ManualDocumento100 páginas50996034X2RM - Principles of Control Systems - Solution ManualClyde Cauchi100% (1)
- Adept Application User's ManualDocumento9 páginasAdept Application User's ManualAna Laura Baeza RomeroAinda não há avaliações
- Driving Unipolar Stepper Motors Using C51/C251: Application NoteDocumento15 páginasDriving Unipolar Stepper Motors Using C51/C251: Application Noteani8888Ainda não há avaliações
- Chapter 5 - Functions: OutlineDocumento33 páginasChapter 5 - Functions: OutlineGayu SivamAinda não há avaliações
- Xilinx10.1 Quick Start PDFDocumento28 páginasXilinx10.1 Quick Start PDFsupriyasenapatiAinda não há avaliações
- 50996034X2RM - Principles of Control Systems - Solution ManualDocumento100 páginas50996034X2RM - Principles of Control Systems - Solution ManualClyde Cauchi100% (1)
- Fun CDocumento1 páginaFun CClyde CauchiAinda não há avaliações
- C Chap01Documento21 páginasC Chap01Michael MagpantayAinda não há avaliações
- Data Sheet: Mcu For DSLDocumento49 páginasData Sheet: Mcu For DSLradioscribdAinda não há avaliações
- Development of The ARM ArchitectureDocumento44 páginasDevelopment of The ARM ArchitectureDwaraka OrugantiAinda não há avaliações
- Behringer Mixer MX602ADocumento16 páginasBehringer Mixer MX602AÁlvaro Remacha Vecino100% (1)
- Report VHDL PDFDocumento31 páginasReport VHDL PDFShailesh PrajapatiAinda não há avaliações
- Powers of 2 Table - Vaughn's SummariesDocumento2 páginasPowers of 2 Table - Vaughn's SummariesAnonymous NEqv0Uy7KAinda não há avaliações
- Cmos Schmitt Trigger CircuitsDocumento9 páginasCmos Schmitt Trigger CircuitsAakash ChandraAinda não há avaliações
- 2.1 Introduction BJTDocumento3 páginas2.1 Introduction BJTlizhi0007Ainda não há avaliações
- 18cs442 MC-2Documento2 páginas18cs442 MC-2M.A rajaAinda não há avaliações
- Dt-9205 MultimeterDocumento5 páginasDt-9205 MultimeterBen ThiartAinda não há avaliações
- Guide To Cache MemoryDocumento5 páginasGuide To Cache MemoryVivek Pai KAinda não há avaliações
- SMPS - (Switch Mode Power Supply)Documento20 páginasSMPS - (Switch Mode Power Supply)Karthi Keyan VeeraAinda não há avaliações
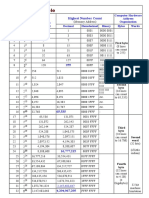
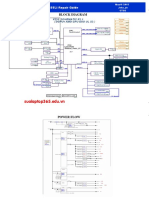
- X555LI Repair Guide Signal Measurement PointsDocumento7 páginasX555LI Repair Guide Signal Measurement Pointsopenid_6iaTksxPAinda não há avaliações
- Gpib and Ieee 488Documento17 páginasGpib and Ieee 488communicationridersAinda não há avaliações
- VHDL Code For FilterDocumento2 páginasVHDL Code For FilterArkadip GhoshAinda não há avaliações
- All Rights Reserved, Central Computer Centre, SVNIT SuratDocumento1 páginaAll Rights Reserved, Central Computer Centre, SVNIT SuratVishwajeet S BAinda não há avaliações
- © J Wagner March 20, 2000Documento31 páginas© J Wagner March 20, 2000S.S. MeenaAinda não há avaliações
- Sony kdl-22cx520 kdl-32cx520 cx523 kdl-40cx520 523 Chassis Az2g SM PDFDocumento98 páginasSony kdl-22cx520 kdl-32cx520 cx523 kdl-40cx520 523 Chassis Az2g SM PDFBoKi PoKiAinda não há avaliações
- Altera Component CreationDocumento3 páginasAltera Component Creationfran0772Ainda não há avaliações
- Adaptive Delta ModulationDocumento16 páginasAdaptive Delta ModulationRaviKiranAinda não há avaliações
- Micro 133 Prelim Lecture 5 - Intel ΜP Instruction Encoding and DecodingDocumento16 páginasMicro 133 Prelim Lecture 5 - Intel ΜP Instruction Encoding and DecodingKeilla Romabiles LeopandoAinda não há avaliações
- Me15n10 V1.4 - SpecDocumento5 páginasMe15n10 V1.4 - Specrov1976Ainda não há avaliações
- Siemens S7 PLC Error TroubleshootingDocumento27 páginasSiemens S7 PLC Error TroubleshootingSofiane BenseghirAinda não há avaliações
- Technical HandbookDocumento51 páginasTechnical HandbookBryan WahyuAinda não há avaliações
- Draw #Item Description: With Ion. Cham. 5 Areas Normal VersionDocumento41 páginasDraw #Item Description: With Ion. Cham. 5 Areas Normal VersionlegasuAinda não há avaliações
- 7039xxx Rev 0909Documento1 página7039xxx Rev 0909pandavision76Ainda não há avaliações
- Health Monitoring GloveDocumento7 páginasHealth Monitoring GloveYashAinda não há avaliações
- Marantz Sa7001 SMDocumento68 páginasMarantz Sa7001 SMPietertje58Ainda não há avaliações
- Obstacle Avoiding Robot Using Ultrasonic SensorDocumento10 páginasObstacle Avoiding Robot Using Ultrasonic SensorANIL KUMAR CSTSERVICESAinda não há avaliações