Você também pode gostar
- Node-to-Node Approaching in Wireless Mesh ConnectivityNo EverandNode-to-Node Approaching in Wireless Mesh ConnectivityNota: 5 de 5 estrelas5/5 (1)
- Optimizing Energy Efficiency in Wireless Sensor Networks On Various Qos Parameters Using Grasshopper Optimization AlgorithmDocumento6 páginasOptimizing Energy Efficiency in Wireless Sensor Networks On Various Qos Parameters Using Grasshopper Optimization AlgorithmmaddysaAinda não há avaliações
- Upload - 1764473-DATA TRANSMISSION IN WIRELESS SENSOR NETWORK BY CLUSTERING TECHNIQUEDocumento5 páginasUpload - 1764473-DATA TRANSMISSION IN WIRELESS SENSOR NETWORK BY CLUSTERING TECHNIQUEpraveen.malikupAinda não há avaliações
- A Study of Cognitive Wireless Sensor Networks: Taxonomy of Attacks and CountermeasuresDocumento8 páginasA Study of Cognitive Wireless Sensor Networks: Taxonomy of Attacks and CountermeasuresBritto Ebrington AjayAinda não há avaliações
- 3.1 Faster - R-CNN - Towards - Real-Time - Object - Detection - With - Region - Proposal - NetworksDocumento13 páginas3.1 Faster - R-CNN - Towards - Real-Time - Object - Detection - With - Region - Proposal - NetworksAmrutasagar KavarthapuAinda não há avaliações
- An Energy-Aware Grid-Based Routing Scheme For Wireless Sensor NetworksDocumento11 páginasAn Energy-Aware Grid-Based Routing Scheme For Wireless Sensor NetworksABDUL WAHABAinda não há avaliações
- Sensors 22 02459Documento18 páginasSensors 22 02459Khánh TrầnAinda não há avaliações
- 10 5923 J Ajis 20170701 02 PDFDocumento12 páginas10 5923 J Ajis 20170701 02 PDFAnju SharmaAinda não há avaliações
- 1-NARSIMHA-IACC 2016 PaperDocumento6 páginas1-NARSIMHA-IACC 2016 PaperRAMANAIAHAinda não há avaliações
- Enhanced VGDRA For Dynamic WSNDocumento8 páginasEnhanced VGDRA For Dynamic WSNEditor IJRITCCAinda não há avaliações
- Siddamallappa SLRP PaperDocumento8 páginasSiddamallappa SLRP PaperSiddamallappaAinda não há avaliações
- Quality of Service of Routing Protocols in Wireless Sensor Networks: A ReviewDocumento26 páginasQuality of Service of Routing Protocols in Wireless Sensor Networks: A ReviewlupsumetroAinda não há avaliações
- Game Theory Based Congestion Control For Routing in Wireless Sensor NetworksDocumento13 páginasGame Theory Based Congestion Control For Routing in Wireless Sensor NetworksMian NabeelAinda não há avaliações
- IJETR032175Documento4 páginasIJETR032175erpublicationAinda não há avaliações
- Deep Cellular Recurrent Network For Efficient Analysis of Time-Series Data With Spatial InformationDocumento10 páginasDeep Cellular Recurrent Network For Efficient Analysis of Time-Series Data With Spatial Informationbaltazzar_90Ainda não há avaliações
- IJETR032357Documento4 páginasIJETR032357erpublicationAinda não há avaliações
- 1 Ijcnwmcaug20181Documento12 páginas1 Ijcnwmcaug20181TJPRC PublicationsAinda não há avaliações
- Queueing Theory-Based Path Delay Analysis of Wireless Sensor NetworksDocumento6 páginasQueueing Theory-Based Path Delay Analysis of Wireless Sensor NetworksAnonymous Gd16J3n7Ainda não há avaliações
- IJEAS0211018Documento5 páginasIJEAS0211018erpublicationAinda não há avaliações
- Algorithms: CARA: A Congestion-Aware Routing Algorithm For Wireless Sensor NetworksDocumento14 páginasAlgorithms: CARA: A Congestion-Aware Routing Algorithm For Wireless Sensor Networkssomenath_senguptaAinda não há avaliações
- (IJIT V7I3P3) :komalDocumento5 páginas(IJIT V7I3P3) :komalIJITJournalsAinda não há avaliações
- Design of A WSN Platform For Long-Term Environmental Monitoring For Iot ApplicationsDocumento5 páginasDesign of A WSN Platform For Long-Term Environmental Monitoring For Iot Applicationsvinoth1128Ainda não há avaliações
- Towards Fast and Accurate Object Detection in Bio-Inspired Spiking Neural Networks Through Bayesian OptimizationDocumento11 páginasTowards Fast and Accurate Object Detection in Bio-Inspired Spiking Neural Networks Through Bayesian Optimizationfokhrul islamAinda não há avaliações
- Ijser: Low Delay and High Throughput Data Collection in Wireless Sensor Networks With Mobile SinksDocumento4 páginasIjser: Low Delay and High Throughput Data Collection in Wireless Sensor Networks With Mobile SinkspavitraAinda não há avaliações
- Energy Efficient Intra-Cluster Data Aggregation TechniqueDocumento9 páginasEnergy Efficient Intra-Cluster Data Aggregation Techniquekenene100% (1)
- Trust-Distrust Protocol For The Secure Routing in Wireless Sensor NetworksDocumento5 páginasTrust-Distrust Protocol For The Secure Routing in Wireless Sensor NetworksMahmood SyedAinda não há avaliações
- R T W S N: A S: Outing Echniques in Ireless Ensor Etworks UrveyDocumento23 páginasR T W S N: A S: Outing Echniques in Ireless Ensor Etworks UrveyQuân HoàngAinda não há avaliações
- Electronics: FPGA Implementation For CNN-Based Optical Remote Sensing Object DetectionDocumento24 páginasElectronics: FPGA Implementation For CNN-Based Optical Remote Sensing Object Detection楊凱閔Ainda não há avaliações
- Advance 1d Sensor Network Opportunistic Routing For Lifetime Enhancement by Adaptive Duty CyclingDocumento7 páginasAdvance 1d Sensor Network Opportunistic Routing For Lifetime Enhancement by Adaptive Duty CyclingavnishAinda não há avaliações
- Energy-Efficient Data Management For Sensor Networks: A Work-In-Progress ReportDocumento4 páginasEnergy-Efficient Data Management For Sensor Networks: A Work-In-Progress ReportbutterflyvAinda não há avaliações
- Design of Flexible Hardware Accelerators For Image Convolutions and Transposed ConvolutionsDocumento16 páginasDesign of Flexible Hardware Accelerators For Image Convolutions and Transposed ConvolutionsYogeshwar nath singhAinda não há avaliações
- Design and Implementation of Energy Efficient Protocol in Wireless Sensor Networks: A ReviewDocumento5 páginasDesign and Implementation of Energy Efficient Protocol in Wireless Sensor Networks: A ReviewAkbar aliAinda não há avaliações
- Distance Based Query Processing System For Mobile ApplicationsDocumento3 páginasDistance Based Query Processing System For Mobile ApplicationserpublicationAinda não há avaliações
- Energy Efficient Sleep Awake Aware (EESAA) Intelligent Sensor Network Routing ProtocolDocumento6 páginasEnergy Efficient Sleep Awake Aware (EESAA) Intelligent Sensor Network Routing ProtocolIramfatimaAinda não há avaliações
- Extending The Lifetime and Balancing Energy Consumption in Wireless Sensor NetworksDocumento9 páginasExtending The Lifetime and Balancing Energy Consumption in Wireless Sensor NetworksNaresh KumarAinda não há avaliações
- RobortDocumento36 páginasRobortKarpareddy BharathmohanreddyAinda não há avaliações
- 2019 Clustering Analysis in Wireless Sensor Networks The Ambit ofDocumento24 páginas2019 Clustering Analysis in Wireless Sensor Networks The Ambit ofabidgul85Ainda não há avaliações
- Fuzzy Logic in WSNDocumento10 páginasFuzzy Logic in WSNRudy RudyansyahAinda não há avaliações
- (IJCST-V10I3P9) :rajesh SDocumento6 páginas(IJCST-V10I3P9) :rajesh SEighthSenseGroupAinda não há avaliações
- Routing Paper WSNDocumento23 páginasRouting Paper WSNDerek WangAinda não há avaliações
- Data-Centric Routing Protocols in Wireless Sensor Networks: A SurveyDocumento6 páginasData-Centric Routing Protocols in Wireless Sensor Networks: A SurveyAnuskaAinda não há avaliações
- Ijcse V1i4p1Documento8 páginasIjcse V1i4p1ISAR-PublicationsAinda não há avaliações
- Lossless In-Network Processing in Wsns For Domain-Specific Monitoring ApplicationsDocumento10 páginasLossless In-Network Processing in Wsns For Domain-Specific Monitoring Applicationsaishwarya waghAinda não há avaliações
- IJSRET V5 Issue1 144Documento7 páginasIJSRET V5 Issue1 144Arthee PandiAinda não há avaliações
- A Special Section in IEEE Access Cooperative and Intelligent SensingDocumento3 páginasA Special Section in IEEE Access Cooperative and Intelligent SensinghamidAinda não há avaliações
- Energy Efficient Routing Protocols For Node Distribution in Wireless Sensor NetworksDocumento6 páginasEnergy Efficient Routing Protocols For Node Distribution in Wireless Sensor NetworksEditor IJTSRDAinda não há avaliações
- Lorawan TM Specification - V1.1Documento8 páginasLorawan TM Specification - V1.1mihtorijeAinda não há avaliações
- M.E Computer Science Wireless Communication ProjectsDocumento8 páginasM.E Computer Science Wireless Communication ProjectskasanproAinda não há avaliações
- IEEE SensorDocumento10 páginasIEEE SensorRajesh JakkulaAinda não há avaliações
- Interworking Wihlgc'Ewrs: Efficient Qos Mechanism UsingDocumento4 páginasInterworking Wihlgc'Ewrs: Efficient Qos Mechanism Usinghithot3210Ainda não há avaliações
- An Efficient Coverage and Maximization of Network Lifetime in Wireless Sensor Networks Through MetaheuristicsDocumento12 páginasAn Efficient Coverage and Maximization of Network Lifetime in Wireless Sensor Networks Through MetaheuristicsIJICT JournalAinda não há avaliações
- M.Phil Computer Science Wireless Communication ProjectsDocumento8 páginasM.Phil Computer Science Wireless Communication ProjectskasanproAinda não há avaliações
- Ad Hoc Networks: Amit Singh, A. NagarajuDocumento19 páginasAd Hoc Networks: Amit Singh, A. NagarajuMuktar AbdellaAinda não há avaliações
- IJETR032651Documento5 páginasIJETR032651erpublicationAinda não há avaliações
- Topology Control of Tactical Wireless Sensor Networks Using Energy Ef Ficient Zone RoutingDocumento14 páginasTopology Control of Tactical Wireless Sensor Networks Using Energy Ef Ficient Zone RoutingMohammad RaheelAinda não há avaliações
- Mobile Agents in Wireless Sensor Networks: A Literature ReviewDocumento22 páginasMobile Agents in Wireless Sensor Networks: A Literature Reviewnuit_claire002Ainda não há avaliações
- Routing in Wireless Sensor Network: Divya LunawatDocumento8 páginasRouting in Wireless Sensor Network: Divya LunawatDivya LunawatAinda não há avaliações
- An Application-Specific Protocol Architecture For Wireless Microsensor NetworksDocumento11 páginasAn Application-Specific Protocol Architecture For Wireless Microsensor NetworksivanAinda não há avaliações
- An Energy-Aware Technique To Improve The Lifetime of Cell Phone Based Wsns Using Isa100.11ADocumento7 páginasAn Energy-Aware Technique To Improve The Lifetime of Cell Phone Based Wsns Using Isa100.11AInternational Journal of Application or Innovation in Engineering & ManagementAinda não há avaliações
- A New Outlook Into Your Business: Anand Chitale and Mike Barnhart, SAS Institute Inc., Cary, NCDocumento9 páginasA New Outlook Into Your Business: Anand Chitale and Mike Barnhart, SAS Institute Inc., Cary, NCbhari4cAinda não há avaliações
- Golti Vs TambrahmDocumento2 páginasGolti Vs Tambrahmbhari4cAinda não há avaliações
- VelloreDocumento1 páginaVellorebhari4cAinda não há avaliações
- Company QuestionnaireDocumento1 páginaCompany Questionnairebhari4cAinda não há avaliações
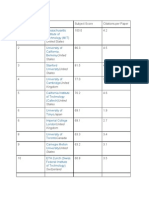
- World's Best UniversitiesDocumento9 páginasWorld's Best Universitiesbhari4cAinda não há avaliações
- Explain How PDF Differs From PostscriptDocumento2 páginasExplain How PDF Differs From PostscriptStephanieAinda não há avaliações
- Dewa Asset ManagemntDocumento7 páginasDewa Asset ManagemntDC VashistAinda não há avaliações
- ISO IEC 17025 2017 Transition TemplateDocumento8 páginasISO IEC 17025 2017 Transition TemplateaasAinda não há avaliações
- Main AssignmentDocumento12 páginasMain Assignmentsvijay87sAinda não há avaliações
- How To Configure SAP Purchase Order Release StrategyDocumento12 páginasHow To Configure SAP Purchase Order Release Strategyphogat projectAinda não há avaliações
- Next Generation Network Addressing SolutionsDocumento318 páginasNext Generation Network Addressing SolutionspvsairamAinda não há avaliações
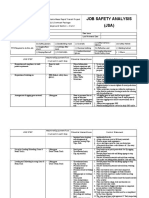
- JSA Lifting With Equipment+Load ChartDocumento13 páginasJSA Lifting With Equipment+Load ChartBoas BoetarzAinda não há avaliações
- Nav1 Eplan2Documento2 páginasNav1 Eplan2Jemar lucidoAinda não há avaliações
- Nexans 500 KV CableDocumento22 páginasNexans 500 KV CableFiras Atwan100% (1)
- Baja Saeindia 2022 DVP&R + Dfmea TemplateDocumento10 páginasBaja Saeindia 2022 DVP&R + Dfmea TemplateNandam HarshithAinda não há avaliações
- Capacitor ABB CLMD - Spec - ABB CapacitorDocumento8 páginasCapacitor ABB CLMD - Spec - ABB CapacitorKR WaruneeAinda não há avaliações
- Radius: Remote Authentication Dial in User Service (RADIUS) Is A NetworkingDocumento6 páginasRadius: Remote Authentication Dial in User Service (RADIUS) Is A NetworkingVandana SharmaAinda não há avaliações
- Land Rover Workshop Manuals L322 Range Rover System Description and Operation AUTOMATIC TRANSMISDocumento1 páginaLand Rover Workshop Manuals L322 Range Rover System Description and Operation AUTOMATIC TRANSMISMark ErskineAinda não há avaliações
- 3-Terminal Positive Linear Regulator Az78LxxDocumento18 páginas3-Terminal Positive Linear Regulator Az78LxxCesarAinda não há avaliações
- Converting KW Ton To COP or EERDocumento2 páginasConverting KW Ton To COP or EERswsw2011Ainda não há avaliações
- UntitledDocumento9 páginasUntitledyzlAinda não há avaliações
- CSC134 Lab 4 - Introduction To MS Word (Part 3)Documento9 páginasCSC134 Lab 4 - Introduction To MS Word (Part 3)MUHAMMAD AIDEED RODZIAinda não há avaliações
- Basics of COA: 1. (MCQ) (GATE-2023: 2M)Documento69 páginasBasics of COA: 1. (MCQ) (GATE-2023: 2M)dzz9wt7x9kAinda não há avaliações
- Quality Form: Dr. Cesar A. Villariba Research and Knowledge Management InstituteDocumento2 páginasQuality Form: Dr. Cesar A. Villariba Research and Knowledge Management Institutewatak ONLINEAinda não há avaliações
- The Modeling and Application of Step Voltage RegulatorDocumento7 páginasThe Modeling and Application of Step Voltage RegulatorAmritanshu PandeyAinda não há avaliações
- ANA Content Marketing Maturity ModelDocumento2 páginasANA Content Marketing Maturity ModelDemand Metric100% (1)
- Embedded Debugging TechniquesDocumento16 páginasEmbedded Debugging TechniquesAhmed HamoudaAinda não há avaliações
- Engine Scania1 PDFDocumento74 páginasEngine Scania1 PDFMarek MaciążekAinda não há avaliações
- DH7 OsDocumento2 páginasDH7 OsSampalau AnglerAinda não há avaliações
- Labsheet#2 - Erd (Amirafatiha Kct15005)Documento4 páginasLabsheet#2 - Erd (Amirafatiha Kct15005)Amira EiraAinda não há avaliações
- Mingw w64 Howto BuildDocumento7 páginasMingw w64 Howto Builddsdadsd sadsadAinda não há avaliações
- Bluehill Universal BrochureDocumento24 páginasBluehill Universal BrochureSoo SeoAinda não há avaliações
- ZipmatchDocumento3 páginasZipmatchDanny CastilloAinda não há avaliações
- схема и сервис мануал на английском Toshiba 46UL863R Ver 1.00Documento138 páginasсхема и сервис мануал на английском Toshiba 46UL863R Ver 1.00Andrey ChersonAinda não há avaliações