Você também pode gostar
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5795)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- Manual de Partes Dumper 730 Caterpillar Vol IIDocumento591 páginasManual de Partes Dumper 730 Caterpillar Vol IIRobinson Guaneme85% (13)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- Matrix Methods OF Structural Analysis: by Dr. A. S. Meghre, S. K. DeshmukhDocumento3 páginasMatrix Methods OF Structural Analysis: by Dr. A. S. Meghre, S. K. DeshmukhThyrso MunhozAinda não há avaliações
- 132 30422 182 PDFDocumento10 páginas132 30422 182 PDFJJAinda não há avaliações
- PID Rotary Dryer PDFDocumento6 páginasPID Rotary Dryer PDFLêNhậtMinhAinda não há avaliações
- Tacoma Narrows Bridge Case StudyDocumento8 páginasTacoma Narrows Bridge Case StudyAshish Singh SengarAinda não há avaliações
- Budhu Soil Mechanics Foundations 3rd TXTBKDocumento1 páginaBudhu Soil Mechanics Foundations 3rd TXTBKNadeem AbbasiAinda não há avaliações
- Design of Intermediate Beam: S E: 200000 MPO B T F D: 554.50 MM T H: D 2t H 0.502 M R W M CB PLL: 4800 Pa H IDocumento3 páginasDesign of Intermediate Beam: S E: 200000 MPO B T F D: 554.50 MM T H: D 2t H 0.502 M R W M CB PLL: 4800 Pa H IMike GocotanoAinda não há avaliações
- 2007 LC4 690 LC8 990 Diagnostic Measurements Failure CodesDocumento49 páginas2007 LC4 690 LC8 990 Diagnostic Measurements Failure Codeschili_s16Ainda não há avaliações
- Techdoc - Print - Page (Manual Armado CAT 785) PDFDocumento347 páginasTechdoc - Print - Page (Manual Armado CAT 785) PDFhualae67% (3)
- Carbon Steel Track Bolts and Nuts: Standard Specification ForDocumento3 páginasCarbon Steel Track Bolts and Nuts: Standard Specification Foralucard375Ainda não há avaliações
- Charlatte HydrochocDocumento1 páginaCharlatte Hydrochocrizkboss8312Ainda não há avaliações
- Programa de Mantencion Simba M7C MK4Documento53 páginasPrograma de Mantencion Simba M7C MK4Cesar QuintanillaAinda não há avaliações
- St. Clair: Allison "World" & "1000/2000/2400" TransmissionDocumento65 páginasSt. Clair: Allison "World" & "1000/2000/2400" TransmissionEinar PupoAinda não há avaliações
- Sepakat Setia Perunding SDN BHD: Design InformationDocumento6 páginasSepakat Setia Perunding SDN BHD: Design InformationAfiq SyahmiAinda não há avaliações
- Bag In-Bag Out CamfilDocumento12 páginasBag In-Bag Out CamfilbinhjukiAinda não há avaliações
- The Founding of The Company: © MAN Diesel A/S L/73480-9.1/0205 (2000/LGJ)Documento11 páginasThe Founding of The Company: © MAN Diesel A/S L/73480-9.1/0205 (2000/LGJ)argentum19619692Ainda não há avaliações
- Severn Glocon Lot2Documento5 páginasSevern Glocon Lot2Amit SurtiAinda não há avaliações
- Worksheet Laws of MotionDocumento2 páginasWorksheet Laws of MotionJyotiprasad DuttaAinda não há avaliações
- Floating JointDocumento2 páginasFloating JointEDUARDO NICOLASAinda não há avaliações
- Presentation - Mee - 4 New1Documento29 páginasPresentation - Mee - 4 New1Amal joyAinda não há avaliações
- Control Valve 16 - 8230usa-GS3Documento6 páginasControl Valve 16 - 8230usa-GS3Amin De Rossi SudrajatAinda não há avaliações
- Expt 2 Performance of A Steam PlantDocumento8 páginasExpt 2 Performance of A Steam PlantAzim YusoffAinda não há avaliações
- Fire Protection Design GuidelinesDocumento11 páginasFire Protection Design GuidelinesMarck Gheson InacayAinda não há avaliações
- Chapter 8. Internal Flow (Bounded, Forced)Documento31 páginasChapter 8. Internal Flow (Bounded, Forced)wadec24Ainda não há avaliações
- DV-5 Deluge Valve With Remote-Resetting Trim 2 To 8 Inch (DN50 To DN200) General DescriptionDocumento24 páginasDV-5 Deluge Valve With Remote-Resetting Trim 2 To 8 Inch (DN50 To DN200) General DescriptionAwais AshrafAinda não há avaliações
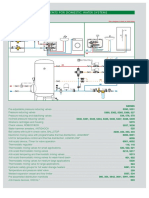
- Components For Domestic Water Systems: This Diagram Is Just An IndicationDocumento22 páginasComponents For Domestic Water Systems: This Diagram Is Just An Indicationravi00098Ainda não há avaliações
- HydraulicsDocumento11 páginasHydraulicsaldz5Ainda não há avaliações
- CG 2015132 02 - 2019 HccavDocumento4 páginasCG 2015132 02 - 2019 HccavRangga AsengAinda não há avaliações
- Configuration Requirements and Effect of Irregularity in StructureDocumento14 páginasConfiguration Requirements and Effect of Irregularity in StructureHernan BeñabonAinda não há avaliações
- Dozer: 10 50J Waste HandlerDocumento6 páginasDozer: 10 50J Waste Handlerwalk01Ainda não há avaliações