Você também pode gostar
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
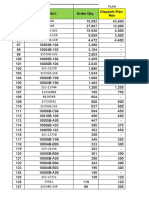
- Order Qty Vs Dispatch Plan - 04 11 20Documento13 páginasOrder Qty Vs Dispatch Plan - 04 11 20NPD1 JAKAPAinda não há avaliações
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- Antikythera MechanismDocumento25 páginasAntikythera MechanismchetansergiurazvanAinda não há avaliações
- Receiving Material Procedure (Done) (Sudah Direvisi)Documento8 páginasReceiving Material Procedure (Done) (Sudah Direvisi)Hardika SambilangAinda não há avaliações
- Compact 40/25Documento58 páginasCompact 40/25znim04Ainda não há avaliações
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Ofdma: LTE Air Interface CourseDocumento63 páginasOfdma: LTE Air Interface CourseAkhtar KhanAinda não há avaliações
- Cisco Network DiagramDocumento1 páginaCisco Network DiagramĐỗ DuyAinda não há avaliações
- 20 Site SummaryDocumento2 páginas20 Site SummaryMuzammil WepukuluAinda não há avaliações
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- Ude My For Business Course ListDocumento51 páginasUde My For Business Course ListShehroz BhuttaAinda não há avaliações
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Report On HACCP ManualDocumento72 páginasReport On HACCP ManualRizwan KhanAinda não há avaliações
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- Portland CementDocumento46 páginasPortland Cementni putu diah untariningsihAinda não há avaliações
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Le22a1321 AocDocumento130 páginasLe22a1321 AocEchefisEchefisAinda não há avaliações
- 27C ChainDocumento19 páginas27C ChainyanaziAinda não há avaliações
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- zx350lc 3 InglesDocumento6 páginaszx350lc 3 InglesLuis Nahuelhuaique LemusAinda não há avaliações
- Transmicion de CF 500, CF 600 PDFDocumento337 páginasTransmicion de CF 500, CF 600 PDFgusspeSAinda não há avaliações
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
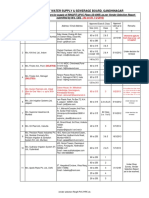
- GWSSB Vendor List 19.11.2013Documento18 páginasGWSSB Vendor List 19.11.2013sivesh_rathiAinda não há avaliações
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (345)
- Schematic Lenovo ThinkPad T410 NOZOMI-1Documento99 páginasSchematic Lenovo ThinkPad T410 NOZOMI-1borneocampAinda não há avaliações
- Good Practices in Government Resource Planning, Developed Vs Developing CountriesDocumento11 páginasGood Practices in Government Resource Planning, Developed Vs Developing CountriesFreeBalanceGRPAinda não há avaliações
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- Mega PostDocumento5 páginasMega PostandreyfgAinda não há avaliações
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- Ain Tsila Development Main EPC Contract A-CNT-CON-000-00282 Subcontract N°: JI-2045/07-002BDocumento15 páginasAin Tsila Development Main EPC Contract A-CNT-CON-000-00282 Subcontract N°: JI-2045/07-002BAslaouiAinda não há avaliações
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- Prospects For Alkaline Zero Gap Water Electrolysers For Hydrogen ProductionDocumento16 páginasProspects For Alkaline Zero Gap Water Electrolysers For Hydrogen Productionkhan47pkAinda não há avaliações
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- 100ah - 12V - 6FM100 VISIONDocumento2 páginas100ah - 12V - 6FM100 VISIONBashar SalahAinda não há avaliações
- Understanding Low Voltage Power Distribution SystemsDocumento64 páginasUnderstanding Low Voltage Power Distribution SystemsJorge Luis Mallqui Barbaran100% (1)
- Dynamic Cone Penetrometers: In-Situ CBR in 10 Minutes With Dual-Mass DcpsDocumento2 páginasDynamic Cone Penetrometers: In-Situ CBR in 10 Minutes With Dual-Mass Dcpsd'Hell CaesarAinda não há avaliações
- IEM PI A401 - ANNEXE - Design & Site ExperienceDocumento5 páginasIEM PI A401 - ANNEXE - Design & Site ExperienceapiplajengilaAinda não há avaliações
- Estimation Software For Presure VesselDocumento36 páginasEstimation Software For Presure VesselKarthikeyan Shanmugavel0% (1)
- Advanced Cooling System - EMD00253ENDocumento4 páginasAdvanced Cooling System - EMD00253ENnarayanan_anoob0% (1)
- Quantity Surveying Division Assessment of Professional Competence Final Assessment 2014 Practice Problems / Part Ii Written TestDocumento31 páginasQuantity Surveying Division Assessment of Professional Competence Final Assessment 2014 Practice Problems / Part Ii Written TestjackyAinda não há avaliações
- Method StatementDocumento4 páginasMethod StatementtayitbatovAinda não há avaliações
- Opc PDFDocumento20 páginasOpc PDFnirajAinda não há avaliações
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- Web 2.0: Dynamic Web PagesDocumento12 páginasWeb 2.0: Dynamic Web PagesAra PantaleonAinda não há avaliações