Você também pode gostar
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- Auditory Response To Pulsed Radiofrequency EnergyDocumento12 páginasAuditory Response To Pulsed Radiofrequency Energybingwazzup100% (1)
- Nonlethal Weapons and CapabilitiesDocumento74 páginasNonlethal Weapons and Capabilitiesbingwazzup100% (2)
- Behavioral and Cognitive Effects of Microwave ExposureDocumento24 páginasBehavioral and Cognitive Effects of Microwave Exposurebingwazzup100% (1)
- Csat 11Documento52 páginasCsat 11Mossad NewsAinda não há avaliações
- Ip Multicast Part1Documento18 páginasIp Multicast Part1Pallab PalAinda não há avaliações
- Non-Lethal Weaponry: Applications To Ac-130 GunshipsDocumento36 páginasNon-Lethal Weaponry: Applications To Ac-130 Gunshipsbingwazzup100% (1)
- DEW Electromagnetic SpectrumDocumento3 páginasDEW Electromagnetic SpectrumbingwazzupAinda não há avaliações
- A Low-Cost Approach To FMCW Radar: Through-Wall Microwatt RadarDocumento28 páginasA Low-Cost Approach To FMCW Radar: Through-Wall Microwatt Radarbingwazzup100% (1)
- The Use of RFID For Human Identification A DRAFT REPORT From DHS Emerging Applications and Technology SubcommitteeDocumento14 páginasThe Use of RFID For Human Identification A DRAFT REPORT From DHS Emerging Applications and Technology SubcommitteespectabearAinda não há avaliações
- Implementing A Digital Tracker For Monopulse Radar Using The TMS320C40 DSPDocumento26 páginasImplementing A Digital Tracker For Monopulse Radar Using The TMS320C40 DSPbingwazzupAinda não há avaliações
- An Investigation On The Physiological and Psychological Effects of Infrasound On PersonsDocumento6 páginasAn Investigation On The Physiological and Psychological Effects of Infrasound On Personsbingwazzup100% (1)
- An Investigation On The Physiological and Psychological Effects of Infrasound On PersonsDocumento6 páginasAn Investigation On The Physiological and Psychological Effects of Infrasound On Personsbingwazzup100% (1)
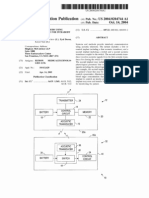
- Remote Mobile Monitoring and Communications Systems (US Patent # 5870029)Documento7 páginasRemote Mobile Monitoring and Communications Systems (US Patent # 5870029)bingwazzup100% (1)
- Ultrasonic Interrogating System and Exciter-Detector Circuit ThereforDocumento12 páginasUltrasonic Interrogating System and Exciter-Detector Circuit ThereforbingwazzupAinda não há avaliações
- Random Noise Monopulse Radar System For Covert Tracking of TargetsDocumento10 páginasRandom Noise Monopulse Radar System For Covert Tracking of TargetsbingwazzupAinda não há avaliações
- Directed Energy WeaponsDocumento368 páginasDirected Energy WeaponsPete Santilli100% (1)
- Apparatus and Methods Using Acoustic Telemetry For Intrabody CommunicationsDocumento18 páginasApparatus and Methods Using Acoustic Telemetry For Intrabody CommunicationsbingwazzupAinda não há avaliações
- Frequency Choice For Radio Telemetry: HF-vs-VHF-ConundrumDocumento7 páginasFrequency Choice For Radio Telemetry: HF-vs-VHF-Conundrumbingwazzup100% (1)
- An Overview of Acoustic TelemetryDocumento11 páginasAn Overview of Acoustic TelemetrybingwazzupAinda não há avaliações
- Model of A Monopulse Radar Tracking System For Student LaboratoryDocumento6 páginasModel of A Monopulse Radar Tracking System For Student Laboratorybingwazzup100% (1)
- The Radio Armateur Microwave Communications HandbookDocumento192 páginasThe Radio Armateur Microwave Communications HandbookRapee Dev100% (1)
- Aerial Laser ScanningDocumento244 páginasAerial Laser Scanningbingwazzup100% (1)
- Radio Direction FinderDocumento78 páginasRadio Direction Finderbingwazzup100% (1)
- The Invisible Third World War by W. H. Bowart and Richard SuttonDocumento35 páginasThe Invisible Third World War by W. H. Bowart and Richard Suttonhisroyalslynessone2funkAinda não há avaliações
- Apparatus and Methods Using Acoustic Telemetry For Intrabody CommunicationsDocumento18 páginasApparatus and Methods Using Acoustic Telemetry For Intrabody CommunicationsbingwazzupAinda não há avaliações
- Model of A Monopulse Radar Tracking System For Student LaboratoryDocumento6 páginasModel of A Monopulse Radar Tracking System For Student Laboratorybingwazzup100% (1)
- An Overview of Acoustic TelemetryDocumento11 páginasAn Overview of Acoustic TelemetrybingwazzupAinda não há avaliações
- Infra SoundDocumento7 páginasInfra Soundbingwazzup100% (1)
- Random Noise Monopulse Radar System For Covert Tracking of TargetsDocumento10 páginasRandom Noise Monopulse Radar System For Covert Tracking of TargetsbingwazzupAinda não há avaliações
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (399)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (120)
- ExternalSpecialist SEARCH RESULTDocumento6 páginasExternalSpecialist SEARCH RESULTSea RouteAinda não há avaliações
- Service Manual: XR3F-19B160Documento9 páginasService Manual: XR3F-19B160Andre VPAinda não há avaliações
- KV Az212m61Documento155 páginasKV Az212m61DeddyThungAinda não há avaliações
- Nokia-FastMile-5G User GuideDocumento59 páginasNokia-FastMile-5G User GuideHue HueAinda não há avaliações
- 1556997962SXT-LTE KitDocumento5 páginas1556997962SXT-LTE KitnetspidercAinda não há avaliações
- Best Network Installation Company in DubaiDocumento7 páginasBest Network Installation Company in Dubaialyamin ComputersAinda não há avaliações
- S61A Model CS25M20SSNSKLG, CS29M20SPNS - KLG, CS29M20SSNSKLGDocumento74 páginasS61A Model CS25M20SSNSKLG, CS29M20SPNS - KLG, CS29M20SSNSKLGKoTheinHtooAinda não há avaliações
- 10ec71 - CCN - Notes PDFDocumento127 páginas10ec71 - CCN - Notes PDFRashmi Samant100% (2)
- CCNAquestions July 2019 PDFDocumento294 páginasCCNAquestions July 2019 PDFAlbertoAinda não há avaliações
- CH 4 Digital Transmission Media Multiple Choice Questions and Answers MCQ PDF Data Communication and NetworkingDocumento16 páginasCH 4 Digital Transmission Media Multiple Choice Questions and Answers MCQ PDF Data Communication and NetworkingsaifAinda não há avaliações
- Encoder y ArduinoDocumento30 páginasEncoder y ArduinoFernando Escalante100% (1)
- Eds-208 Series Quick Installation Guide: Moxa Etherdevice SwitchDocumento12 páginasEds-208 Series Quick Installation Guide: Moxa Etherdevice SwitchJudin HAinda não há avaliações
- Michael Barreto ResumeDocumento2 páginasMichael Barreto Resumebarretomichael88Ainda não há avaliações
- Blueprint Ceh v10Documento3 páginasBlueprint Ceh v10Abdul KarimAinda não há avaliações
- Zte R8862A S2600-Users-Manual-ZTE-q78-r8862as2600-ex-1-20Documento26 páginasZte R8862A S2600-Users-Manual-ZTE-q78-r8862as2600-ex-1-20romoAinda não há avaliações
- Cyber Security ToolsDocumento13 páginasCyber Security ToolsSamir AslanovAinda não há avaliações
- 2G To 4G Re-Selection IssueDocumento4 páginas2G To 4G Re-Selection IssueAnonymous yzm4usswsAinda não há avaliações
- GSM PS Performance Evaluation and Optimization GuideDocumento21 páginasGSM PS Performance Evaluation and Optimization GuidemohyeAinda não há avaliações
- 7 PI3070igDocumento1 página7 PI3070igGiovanny AntelizAinda não há avaliações
- Nokia BSC Command'sDocumento2 páginasNokia BSC Command'sRao Dheeru100% (7)
- A4064-4 Datasheet en - 201003Documento1 páginaA4064-4 Datasheet en - 201003Khalid ElfiqyAinda não há avaliações
- The Impacts of Globalization Present and Future PerspectivesDocumento5 páginasThe Impacts of Globalization Present and Future PerspectivesEndiong EkponneAinda não há avaliações
- Wcdma For Umts - Hspa Evolution and LteDocumento67 páginasWcdma For Umts - Hspa Evolution and LteDurgesh Kumar100% (1)
- Capacitor Series ParallelDocumento4 páginasCapacitor Series ParallelJose C. Lita JrAinda não há avaliações
- IEC 61158-2 Physical Layer Specification and Service Definition PDFDocumento338 páginasIEC 61158-2 Physical Layer Specification and Service Definition PDFtênchỉđểgọiAinda não há avaliações
- Cnet Powerfast CNFH 624Documento2 páginasCnet Powerfast CNFH 624FADZIL EeAinda não há avaliações
- The Network Layer Is Concerned With GettingDocumento103 páginasThe Network Layer Is Concerned With GettingsrinusirisalaAinda não há avaliações
- ODV 032R21K For - Russia - DS - 0 0 1Documento1 páginaODV 032R21K For - Russia - DS - 0 0 1Екатерина СеливерстоваAinda não há avaliações
- 004 - MR - Behgooy, Kavoshcom, The Futureof FTTxTechnologiesinIran, December2010Documento25 páginas004 - MR - Behgooy, Kavoshcom, The Futureof FTTxTechnologiesinIran, December2010Oswaldo Rivera0% (1)
- 1 Clock Domain CrossingDocumento35 páginas1 Clock Domain CrossingRamakrishnaRao SoogooriAinda não há avaliações