Você também pode gostar
- LS G100 Quick SettingDocumento8 páginasLS G100 Quick SettingtrunghieutcAinda não há avaliações
- ATC - Automatic Air Conditioner PDFDocumento134 páginasATC - Automatic Air Conditioner PDFbenAinda não há avaliações
- Metal Table-2865 - 2866Documento1 páginaMetal Table-2865 - 2866kastelaninAinda não há avaliações
- Hardness ConversionDocumento11 páginasHardness ConversionSimon RisteskiAinda não há avaliações
- Caustic Soda Flake MSDS PDFDocumento3 páginasCaustic Soda Flake MSDS PDFFajar RamadhanAinda não há avaliações
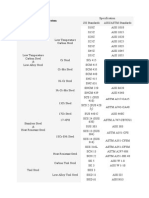
- Metal Equivalent GradesDocumento2 páginasMetal Equivalent GradesMarcelo CostaAinda não há avaliações
- LPI Stormaster ESE Air TerminalDocumento8 páginasLPI Stormaster ESE Air TerminaleekamaleshAinda não há avaliações
- Datasheet - Pig Signallers: Product Description and FunctionsDocumento2 páginasDatasheet - Pig Signallers: Product Description and FunctionsMurli ramchandranAinda não há avaliações
- ASTM-A53-B Carbon Steel Pipes Working PresureDocumento3 páginasASTM-A53-B Carbon Steel Pipes Working PresureAndres Giraldo MorenoAinda não há avaliações
- ABB BrakeMotorsDocumento32 páginasABB BrakeMotorsDuy Anh TrầnAinda não há avaliações
- Gate Valve (Z45X)Documento1 páginaGate Valve (Z45X)lnacerAinda não há avaliações
- Stress Analysis of Silo Hopper: by G. Sangareeswari U. GanesanDocumento9 páginasStress Analysis of Silo Hopper: by G. Sangareeswari U. GanesanGANESANMECH05Ainda não há avaliações
- Hopper Calculation-9Documento1 páginaHopper Calculation-9Ujwal KhandokarAinda não há avaliações
- Mitsubishi v500 VFD Instruction ManualDocumento119 páginasMitsubishi v500 VFD Instruction ManualMROstop.com100% (1)
- ArchiCAD Canopy GuideDocumento15 páginasArchiCAD Canopy GuideFellow9Ainda não há avaliações
- Why Switch To Chemical Electrode Earthing ?Documento9 páginasWhy Switch To Chemical Electrode Earthing ?gohilnarendraAinda não há avaliações
- Valve Selection Guide D 35Documento2 páginasValve Selection Guide D 35arrikanAinda não há avaliações
- Upvc Price ChartDocumento4 páginasUpvc Price ChartbewithkiranAinda não há avaliações
- ACW Booster Pump CalculationDocumento7 páginasACW Booster Pump CalculationgreenenergykolkataAinda não há avaliações
- PI734DDocumento8 páginasPI734Deng_hopaAinda não há avaliações
- Calculation Book Cathodic Protection Input ParametersDocumento4 páginasCalculation Book Cathodic Protection Input ParametersLuis SuarezAinda não há avaliações
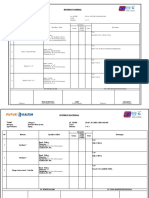
- 04 WPS Atp Asme 2012 (A312 304) (A312 310)Documento6 páginas04 WPS Atp Asme 2012 (A312 304) (A312 310)lailatul kodriAinda não há avaliações
- Bus Bars Current Ratings For Al, CuDocumento1 páginaBus Bars Current Ratings For Al, CuMJ PrabhuAinda não há avaliações
- Centrifugal Pump Data SheetDocumento8 páginasCentrifugal Pump Data SheetCarlos GomezAinda não há avaliações
- Valves Jouka Product-GuideDocumento28 páginasValves Jouka Product-GuideJenniffer Almánzar100% (2)
- Groundfos CR 10-10Documento8 páginasGroundfos CR 10-10defriyantoAinda não há avaliações
- Chemical Solution Density & ViscosityDocumento18 páginasChemical Solution Density & ViscosityLee JianAinda não há avaliações
- ASTM A53 B Carbon Steel Pipes - Allowable PressureDocumento8 páginasASTM A53 B Carbon Steel Pipes - Allowable PressureAizat Najib100% (1)
- Price ListDocumento5 páginasPrice ListSharafat AliAinda não há avaliações
- Fittings Catalogue 2010Documento218 páginasFittings Catalogue 2010sixuletAinda não há avaliações
- EarthingDocumento17 páginasEarthingtangouzeAinda não há avaliações
- Tightening Torques For Imperial (U.S.) Bolts of Yield Strength (Sy) 80%Documento2 páginasTightening Torques For Imperial (U.S.) Bolts of Yield Strength (Sy) 80%Serj DavidAinda não há avaliações
- Klingersil: Optimum Flange SecurityDocumento7 páginasKlingersil: Optimum Flange SecurityjbertralAinda não há avaliações
- Pt. Indexim Coalindo Pt. Jakarta Prima CranesDocumento1 páginaPt. Indexim Coalindo Pt. Jakarta Prima Cranesfajar kristantiAinda não há avaliações
- FTA550F: Limited Option Jockeyxg Pump ControllerDocumento8 páginasFTA550F: Limited Option Jockeyxg Pump ControllerMOHNISHKUMARJHAAinda não há avaliações
- Equivalent SteelDocumento2 páginasEquivalent SteelJustin MorrisAinda não há avaliações
- Manual VF-PS1 1Documento307 páginasManual VF-PS1 1RaymondAinda não há avaliações
- Peerless Pump Company PJPC Jockey Pump Controllers: Installation and Operation InstructionsDocumento8 páginasPeerless Pump Company PJPC Jockey Pump Controllers: Installation and Operation InstructionsJhe InibamAinda não há avaliações
- HFDSR - 1500kw 6kv Drwg.Documento4 páginasHFDSR - 1500kw 6kv Drwg.Sulistyono SulistyonoAinda não há avaliações
- Price List PT Sua: NohmiDocumento2 páginasPrice List PT Sua: NohmiNur rohmanAinda não há avaliações
- Multiconductor TechnicalDocumento24 páginasMulticonductor TechnicalJuan Felipe Vieira GaviriaAinda não há avaliações
- Misumi Golbal Tool Steel Equivalents by ManufacturerDocumento1 páginaMisumi Golbal Tool Steel Equivalents by Manufacturerwulfgang66Ainda não há avaliações
- TechnicalDocumento36 páginasTechnicalshahzad afzal100% (1)
- Analisa Harga Satuan (Student Version)Documento115 páginasAnalisa Harga Satuan (Student Version)endi_putra_1Ainda não há avaliações
- Valve Selection Guide: - ContentsDocumento12 páginasValve Selection Guide: - ContentsAnonymous R23prjoKnoAinda não há avaliações
- OpeningCalculator v1 0Documento4 páginasOpeningCalculator v1 0PROYECTOMSAinda não há avaliações
- Mitsubishi Freqrol FR S500 ManualDocumento191 páginasMitsubishi Freqrol FR S500 Manualzodiakastro75Ainda não há avaliações
- Thesis On PneumaticDocumento87 páginasThesis On PneumaticKhaled AbdelfattahAinda não há avaliações
- Caustic Soda Liquid 48-50%Documento12 páginasCaustic Soda Liquid 48-50%wongpengchiong7205Ainda não há avaliações
- Klinger - Gasket FactorsDocumento1 páginaKlinger - Gasket FactorsAnonymous q2HC0zyfa2Ainda não há avaliações
- Ball ValvesDocumento34 páginasBall ValvesalexescAinda não há avaliações
- FR A 500 ManualDocumento242 páginasFR A 500 ManualkothuwonAinda não há avaliações
- Air ConditionerDocumento74 páginasAir Conditionermuzaaj100% (1)
- Form HDPE Pipe Inspection-2Documento2 páginasForm HDPE Pipe Inspection-2Angga Dwi PutrantoAinda não há avaliações
- Kabelindo NYY CableDocumento11 páginasKabelindo NYY CableAvan Setyo PratamaAinda não há avaliações
- 6se7014-0tp50 Siemens Manual DatasheetDocumento27 páginas6se7014-0tp50 Siemens Manual DatasheetDinh Nguyen VanAinda não há avaliações
- Generic 7Sw: User Installation / Configuration Manual T150 Transmitter R170 ReceiverDocumento16 páginasGeneric 7Sw: User Installation / Configuration Manual T150 Transmitter R170 ReceiverVladimir Illich Pinzon BallenAinda não há avaliações
- Manual de Variador de Velocidad WEG VECTORDocumento32 páginasManual de Variador de Velocidad WEG VECTORSamuel Miranda PintoAinda não há avaliações
- Iomrmpxxxx00 GBDocumento27 páginasIomrmpxxxx00 GBSuranAinda não há avaliações
- tcf-142-rm Series Quick Installation Guide Manual-2Documento8 páginastcf-142-rm Series Quick Installation Guide Manual-2Vladimir BukaricaAinda não há avaliações
- Flux Cored Arc WeldingDocumento11 páginasFlux Cored Arc WeldingMarius BarAinda não há avaliações
- F701 SDocumento166 páginasF701 SMarius BarAinda não há avaliações
- Grounding ADCsDocumento14 páginasGrounding ADCsMarius BarAinda não há avaliações
- Wideband O2 Sensors 2008Documento27 páginasWideband O2 Sensors 2008Marius Bar100% (1)
- Intersil Basics Dec2011Documento3 páginasIntersil Basics Dec2011Marius BarAinda não há avaliações
- GDBDocumento608 páginasGDBMarius BarAinda não há avaliações
- Slup 198Documento7 páginasSlup 198Marius BarAinda não há avaliações
- Micom P43X: Distance Protection and Switchgear ControlDocumento8 páginasMicom P43X: Distance Protection and Switchgear ControlMarlom19Ainda não há avaliações
- R-23 Unit-2 ChemistryDocumento12 páginasR-23 Unit-2 ChemistrycherukurimanojsarmaAinda não há avaliações
- Hiref - Jref CW - en Hf65000232a WebDocumento2 páginasHiref - Jref CW - en Hf65000232a WebchristopherAinda não há avaliações
- rr220401 Communication TheoryDocumento8 páginasrr220401 Communication TheorySRINIVASA RAO GANTAAinda não há avaliações
- IDD-43C智能仪表 - Inmotion - 操作说明HC - V1.4 - 英文版Documento38 páginasIDD-43C智能仪表 - Inmotion - 操作说明HC - V1.4 - 英文版Putra SumatraAinda não há avaliações
- Electrical Diagrams: Ac Motor Control SystemDocumento80 páginasElectrical Diagrams: Ac Motor Control SystemJohn fredy cuervo100% (1)
- NVIS 2040-80 20antennaDocumento7 páginasNVIS 2040-80 20antennaChris VinceAinda não há avaliações
- Use of Internet and Electronic Communication SystemDocumento7 páginasUse of Internet and Electronic Communication Systempraveenrock1118Ainda não há avaliações
- DWDM PPT Industrial SeminarDocumento29 páginasDWDM PPT Industrial SeminarRajat Goel100% (1)
- ANT-A79451702v06-1152-001 DatasheetDocumento2 páginasANT-A79451702v06-1152-001 DatasheetАнтонAinda não há avaliações
- Monitoring and Controling of Remote Industrial PlantDocumento15 páginasMonitoring and Controling of Remote Industrial PlantraghuAinda não há avaliações
- Sustainability Regenerative Drives Cutsheet 022213Documento2 páginasSustainability Regenerative Drives Cutsheet 022213angela1590Ainda não há avaliações
- How Do Wind Power Plants Work?: How Are Wind Turbines Connected To The Electricity Network ?Documento3 páginasHow Do Wind Power Plants Work?: How Are Wind Turbines Connected To The Electricity Network ?Sección Uso CasinoAinda não há avaliações
- Lenco Mes-202 enDocumento10 páginasLenco Mes-202 enBenoni RaileanuAinda não há avaliações
- 15IPST024Documento217 páginas15IPST024Roland BagiAinda não há avaliações
- Ov14d 777765Documento5 páginasOv14d 777765Sergio ReyesAinda não há avaliações
- Nibe GV HR110 Pliant 30 09 2013 enDocumento4 páginasNibe GV HR110 Pliant 30 09 2013 envaliAinda não há avaliações
- CatalogDocumento7 páginasCataloglangtu2011Ainda não há avaliações
- ZEX Purge Kit Installation InstructionsDocumento3 páginasZEX Purge Kit Installation InstructionsJImAinda não há avaliações
- PMR446Documento2 páginasPMR446SultanAinda não há avaliações
- Day16emb8c0 Rev.c, Day16emb8co Rev.c, Y16e Dual Si 0527 Bom 15Documento44 páginasDay16emb8c0 Rev.c, Day16emb8co Rev.c, Y16e Dual Si 0527 Bom 15Vladimír Dravecký100% (2)
- HowtoPerformanArcFlashStudy PDFDocumento8 páginasHowtoPerformanArcFlashStudy PDFkiran392Ainda não há avaliações
- Mcs2000 Test ModeDocumento4 páginasMcs2000 Test ModeRobertBoucherAinda não há avaliações
- Komatsu EGSDocumento2 páginasKomatsu EGSdickyAinda não há avaliações
- Serialflash PDFDocumento39 páginasSerialflash PDFniel2nielAinda não há avaliações
- Obscura Delay Manual PDFDocumento17 páginasObscura Delay Manual PDFWarwickDannyAinda não há avaliações
- 194 Construction, Laying and Installation Techniques For Extruded and Self-Contained Fluid Filled Cable Systems PDFDocumento147 páginas194 Construction, Laying and Installation Techniques For Extruded and Self-Contained Fluid Filled Cable Systems PDFAkhil Anumandla100% (1)
- CLAA102NA0ACWDocumento16 páginasCLAA102NA0ACWIvan BenginAinda não há avaliações
- New Conext XW Na: Inverter/chargerDocumento2 páginasNew Conext XW Na: Inverter/chargerfoxAinda não há avaliações
- BITMAIN ANTMINER S7 Batch 15 With 4.73th/sDocumento6 páginasBITMAIN ANTMINER S7 Batch 15 With 4.73th/scjtrybiecAinda não há avaliações