Você também pode gostar
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Pipeline Construction InspecDocumento48 páginasPipeline Construction InspecAliDadKhan100% (2)
- Static Timing Analysis: January 05Documento57 páginasStatic Timing Analysis: January 05Sandeep PatilAinda não há avaliações
- Stulz C7000R 01 PDFDocumento198 páginasStulz C7000R 01 PDFNarciso Torres0% (1)
- Clockgate Enable Path Timing: - TypeDocumento5 páginasClockgate Enable Path Timing: - TypeSandeep PatilAinda não há avaliações
- Mallika Ancient Indian HistoryDocumento36 páginasMallika Ancient Indian HistorySandeep PatilAinda não há avaliações
- Debugging Clock Trees Will Now Be Easier: Cadence Cdnlive! 2007 Emea Conference in MunichDocumento22 páginasDebugging Clock Trees Will Now Be Easier: Cadence Cdnlive! 2007 Emea Conference in MunichSandeep PatilAinda não há avaliações
- Collections LabsDocumento23 páginasCollections LabsSandeep PatilAinda não há avaliações
- ESE570 Lab112Documento4 páginasESE570 Lab112Sandeep PatilAinda não há avaliações
- Mallika Ancient Indian HistoryDocumento36 páginasMallika Ancient Indian HistorySandeep PatilAinda não há avaliações
- Tutorial Chapter 2Documento5 páginasTutorial Chapter 2Naasir SheekeyeAinda não há avaliações
- Liter Ature - 4A: Start ThinkingDocumento2 páginasLiter Ature - 4A: Start ThinkingNour AlkaloutiAinda não há avaliações
- Oracle CRM On DemandDocumento2 páginasOracle CRM On Demandajazahmednet3946Ainda não há avaliações
- Recent Advances in Second Generation Bioethanol Production An Insight To Pretreatment, Saccharification and Fermentation ProcessesDocumento11 páginasRecent Advances in Second Generation Bioethanol Production An Insight To Pretreatment, Saccharification and Fermentation ProcessesBryant CoolAinda não há avaliações
- Comparing Registers: MIPS vs. ARM AssemblyDocumento12 páginasComparing Registers: MIPS vs. ARM Assemblyshruti chouhanAinda não há avaliações
- Please Complete The Information Requested Below: COMPANY NAME: X2 Logics Staffing Solution, IncDocumento2 páginasPlease Complete The Information Requested Below: COMPANY NAME: X2 Logics Staffing Solution, Incwasim riyazAinda não há avaliações
- Management Information Systems and Corporate Decision - Making: A Literature ReviewDocumento5 páginasManagement Information Systems and Corporate Decision - Making: A Literature Reviewvaaz205Ainda não há avaliações
- CSR of Pidilite PDFDocumento2 páginasCSR of Pidilite PDFtarang keraiAinda não há avaliações
- 136 OsgoodeDocumento8 páginas136 Osgoodejawaid6970Ainda não há avaliações
- Thermo 5th Chap17 P096Documento19 páginasThermo 5th Chap17 P096UTA - Std - Elvin ChantreAinda não há avaliações
- Department of Education: Activity Completion ReportDocumento1 páginaDepartment of Education: Activity Completion ReportJanineJavier100% (1)
- Dr./Ar. Jocelyn A. Rivera-Lutap, Fuap, FriaDocumento1 páginaDr./Ar. Jocelyn A. Rivera-Lutap, Fuap, FriaShanaia BualAinda não há avaliações
- Chapter 1 Philosophical Perspective of The SelfDocumento64 páginasChapter 1 Philosophical Perspective of The SelfSUSHI CASPEAinda não há avaliações
- Activity On The Layers of The Earth 1Documento1 páginaActivity On The Layers of The Earth 1Ian MarianoAinda não há avaliações
- SQAAU SM Assignment BriefDocumento10 páginasSQAAU SM Assignment BriefJamil NassarAinda não há avaliações
- Indian Council of Medical ResearchDocumento6 páginasIndian Council of Medical Researchram_naik_1Ainda não há avaliações
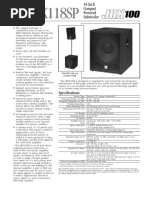
- JRX118SP SpecsheetDocumento2 páginasJRX118SP SpecsheetLuisAinda não há avaliações
- QuestionnaireDocumento5 páginasQuestionnairePrisca FolorunsoAinda não há avaliações
- 1xEV RF Optimization Guidelines R24Documento83 páginas1xEV RF Optimization Guidelines R24lady_sAinda não há avaliações
- Acm 003Documento5 páginasAcm 003Roan BAinda não há avaliações
- Survey 2 Module 2Documento76 páginasSurvey 2 Module 2veereshAinda não há avaliações
- Centennial Tower Promotion 1Documento10 páginasCentennial Tower Promotion 1madeAinda não há avaliações
- Product Management PRELIM EXAMDocumento24 páginasProduct Management PRELIM EXAMAlyssa marieAinda não há avaliações
- Option MCQ-Human Resource Management (205) : Clarifying Handling People Maintaing Relationship (C) Both (A) and (B)Documento4 páginasOption MCQ-Human Resource Management (205) : Clarifying Handling People Maintaing Relationship (C) Both (A) and (B)MukulAinda não há avaliações
- Qüestionari KPSI.: ActivitiesDocumento2 páginasQüestionari KPSI.: ActivitiesfrancisAinda não há avaliações
- Hydraulics Laboratory ManualDocumento37 páginasHydraulics Laboratory ManualHarold Taylor100% (2)
- An Automated Test and Measurement System For Calibration of Industrial FlowmetersDocumento2 páginasAn Automated Test and Measurement System For Calibration of Industrial FlowmetersfredpintoAinda não há avaliações