Escolar Documentos
Profissional Documentos
Cultura Documentos
Deepstar - Chevron Multiphase Design Guide PT 1
Enviado por
Smile MDescrição original:
Título original
Direitos autorais
Formatos disponíveis
Compartilhar este documento
Compartilhar ou incorporar documento
Você considera este documento útil?
Este conteúdo é inapropriado?
Denunciar este documentoDireitos autorais:
Formatos disponíveis
Deepstar - Chevron Multiphase Design Guide PT 1
Enviado por
Smile MDireitos autorais:
Formatos disponíveis
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
Multiphase Pipeline Design Guide
CPTC NOVEMBER 1994 1
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
PART I
TABLE OF CONTENTS
SECTION 1.0 - INTRODUCTION
1.1 Objective and Scope..................................................................................................................................................... 1
1.2 Definition of Terms........................................................................................................................................................ 1
SECTION 2.0 – OVERVIEW OF MULTIPHASE FLOW FUNDAMENTALS
2.1 Design Criteria.............................................................................................................................................................. 11
2.2 Velocity Guidelines ....................................................................................................................................................... 11
2.3 Flow Regimes............................................................................................................................................................... 13
2.4 Pressure Gradient ......................................................................................................................................................... 16
2.4.1 Frictional Losses .......................................................................................................................................... 16
2.4.2 Elevational Losses........................................................................................................................................ 17
2.4.3 Acceleration Losses...................................................................................................................................... 18
2.4.4 Allowable Pressure Drop............................................................................................................................... 20
2.5 Pressure Gradient Calculations...................................................................................................................................... 20
2.6 Section Highlights......................................................................................................................................................... 21
SECTION 3.0 – STEADY STATE DESIGN METHODS
3.1 Pipeline Design Methods ............................................................................................................................................... 25
3.2 Steady State Simulators................................................................................................................................................ 26
3.2.1 Phase Equilibrium and Physical Properties.................................................................................................... 26
3.2.2 Pipeline Elevation Profile .............................................................................................................................. 28
3.2.3 Heat Transfer ............................................................................................................................................... 30
3.2.4 Recommended Methods for Pressure Drop, Liquid Holdup, and
Flow Regime Prediction................................................................................................................................ 33
3.2.5 Interpretation of Results................................................................................................................................ 35
3.3 Section Highlights......................................................................................................................................................... 38
SECTION 4.0 – TRANSIENT FLOW MODELING
4.1 Transient Flow Modeling (General) ................................................................................................................................ 41
4.2 Use of Transient Simulators........................................................................................................................................... 42
CPTC NOVEMBER 1994 2
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
4.3 Section Highlights......................................................................................................................................................... 43
SECTION 5.0 – SLUG FLOW ANALYSIS
5.1 Slug Flow (General) ...................................................................................................................................................... 45
5.2 Slug Length and Frequency Predictions......................................................................................................................... 46
5.2.1 Hydrodynamic Slugging................................................................................................................................ 46
5.2.2 Terrain Slugging........................................................................................................................................... 51
5.2.3 Pigging Slugs............................................................................................................................................... 53
5.2.4 Startup and Blowdown Slugs........................................................................................................................ 55
5.2.5 Rate Change Slugs ...................................................................................................................................... 56
5.2.6 Downstream Equipment Design for Slug Flow............................................................................................... 56
5.3 Section Highlights......................................................................................................................................................... 59
SECTION 6 – EXAMPLE PROBLEMS
6.1 Example Problem – 1 Low Gas/Oil Line Between Platforms .......................................................................................... 63
6.1.1 Line Size...................................................................................................................................................... 65
6.1.2 Slug Length Prediction ................................................................................................................................. 75
6.1.3 Slug Frequency and Length by Hill & Wood Method ...................................................................................... 80
6.2 Example Problem – 2 Gas Condensate Line .................................................................................................................. 88
6.2.1 Table 1, Wellstream Composition ................................................................................................................. 89
6.2.2 Table 2, Pipeline Evaluation Profile ............................................................................................................... 90
6.2.3 Pipeline Simulation Comparison ................................................................................................................... 92
SECTION 7.0 – REFERENCES .................................................................................................................................................... 106
FIGURES
I: 1-1 Flow Regimes in Horizontal Flow................................................................................................................................... 8
I: 1-2 Flow Regimes in Vertical Flow ...................................................................................................................................... 9
I: 2-1 Horizontal Flow Regime Map......................................................................................................................................... 23
I: 2-2 Vertical Flow Regime Map............................................................................................................................................. 24
I: 5-1 Taitel-Dukler Liquid Holdup Predictions.......................................................................................................................... 60
I: 5-2 Stages in Terrain Slugging ............................................................................................................................................ 61
I: 5-3 Pipeline Slugging.......................................................................................................................................................... 62
I: 6-1 Liquid Holdup for Example 1, Year 12 ............................................................................................................................ 101
I: 6-2 Inlet Pressure for Example 1, Year 12............................................................................................................................ 102
I: 6-3 Liquid Flowrate Out of Line, Example 1, Year 12............................................................................................................ 103
I: 6-4 Gas Flowrate Out of Line, Example 1, Year 12............................................................................................................... 104
CPTC NOVEMBER 1994 3
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
I: 6-5 Liquid Holdup Predictions for Example 2........................................................................................................................ 105
CPTC NOVEMBER 1994 4
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
SECTION 1.0 - INTRODUCTION
1.1 Objective and Scope
The simultaneous flow of gas and liquid through pipes, often referred to as multiphase
flow, occurs in almost every aspect of the oil industry. Multiphase flow is present in well
tubing, gathering system pipelines, and processing equipment. The use of multiphase
pipelines has become increasingly important in recent years due to the development of
marginal fields and deep water prospects. In many cases, the feasibility of a design
scenario hinges on cost and operation of the pipeline and its associated equipment.
Multiphase flow in pipes has been studied for more than 50 years, with significant
improvements in the state of the art during the past 15 years. The best available methods
can predict the operation of the pipelines much more accurately than those available only
a few years ago. The designer, however, has to know which methods to use in order to
get the best results.
Part I of this guide consists of seven sections. The fundamentals of multiphase flow in
pipelines are discussed in Section 2.0. The third section describes the use of steady state
simulation methods. This section of the guide helps the designer choose the best methods
for the project, and it gives guidelines to use in designs. The fourth section of the report
briefly describes transient flow modeling. The fifth section describes slug flow modeling,
giving suggestions on the best methods to use in slug flow simulation. The sixth section
includes two sample problems, based on actual designs, which illustrate the design steps
used in analyzing the pipeline designs.
1.2 Definition of Terms
In discussing the design of multiphase pipelines, it is necessary to define several terms
used repeatedly throughout this text.
Near Horizontal and Near Vertical Angles
The term "near horizontal" is used in this guide to denote angles of -10 degrees to +10
CPTC NOVEMBER 1994 5
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
degrees from horizontal. The term "near vertical" denotes upward inclined pipes with
angles from 75 to 90 degrees from horizontal.
Flow Regimes
In multiphase flow, the gas and liquid within the pipe are distributed in several
fundamentally different flow patterns or flow regimes, depending primarily on the gas and
liquid velocities and the angle of inclination. Observers have labeled these flow regimes
with a variety of names. Over 100 different names for the various regimes and sub-
regimes have been used in the literature. In this guide, only four flow regime names will
be used: slug flow, stratified flow, annular flow, and dispersed bubble flow.
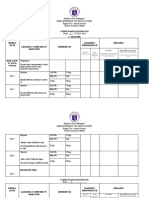
Figure I:1-1 shows the flow regimes for near horizontal flow, and Figure I:1-2 shows the
flow regimes for vertical upward flow. Descriptions of the flow regimes
1. Stratified Flow - at low flowrates in near horizontal pipes, the liquid and gas separate
by gravity, causing the liquid to flow on the bottom of the pipe while the gas flows
above it. At low gas velocities, the liquid surface is smooth. At higher gas velocities,
the liquid surface becomes wavy. Some liquid may flow in the form of liquid droplets
suspended in the gas phase. Stratified flow only exists for certain angles of inclination.
It does not exist in pipes that have upward inclinations of greater than about 1 degree.
Most downwardly inclined pipes are in stratified flow, and many large diameter
horizontal pipes are in stratified flow. This flow regime is also referred to as stratified
smooth, stratified wavy, and wavy flow by various investigators.
2. Annular Flow - at high rates in gas dominated systems, part of the liquid flows as a
film around the circumference of the pipe. The gas and remainder of the liquid (in the
form of entrained droplets) flow in the center of the pipe. The liquid film thickness is
fairly constant for vertical flow, but it is usually asymmetric for horizontal flow due to
gravity. As velocities increase, the fraction of liquid entrained increases and the liquid
film thickness decreases. Annular flow exists for all angles of inclinations. Most gas
dominated pipes in high pressure vertical flow are in annular flow. This flow regime is
referred to as annular-mist or mist flow by many investigators.
CPTC NOVEMBER 1994 6
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
3. Dispersed Bubble Flow - at high rates in liquid dominated systems, the flow is a frothy
mixture of liquid and small entrained gas bubbles. For near vertical flow, dispersed
bubble flow can also occur at more moderate liquid rates when the gas rate is very
low. The flow is steady with few oscillations. It occurs at all angles of inclination.
Dispersed bubble flow frequently occurs in oil wells. Various investigators have
referred to this flow regime as froth or bubble flow.
4. Slug Flow - for near horizontal flow, at moderate gas and liquid velocities, waves on
the surface of the liquid may grow to sufficient height to completely bridge the pipe.
When this happens, alternating slugs of liquid and gas bubbles will flow through the
pipeline. This flow regime can be thought of as an unsteady, alternating combination
of dispersed bubble flow (liquid slug) and stratified flow (gas bubble). The slugs can
cause vibration problems, increased corrosion, and downstream equipment problems
due to its unsteady behavior.
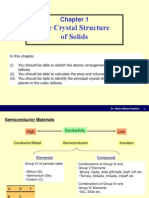
Slug flow also occurs in near vertical flow, but the mechanism for slug initiation is
different. The flow consists of a string of slugs and bullet-shaped bubbles (called
Taylor bubbles) flowing through the pipe alternately. The flow can be thought of as a
combination of dispersed bubble flow (slug) and annular flow (Taylor bubble). The
slugs in vertical flow are generally much smaller than those in near horizontal flow.
Slug flow is the most prevalent flow regime in low pressure, small diameter systems.
In field scale pipelines, slug flow usually occurs in upwardly inclined sections of the
line. It occurs for all angles of inclination. Investigators have used many terms to
describe parts of this flow regime. Among them are: intermittent flow; plug flow;
pseudo-slug flow, and churn flow.
Superficial Velocities
The velocities of the gas and liquid in the pipe are prime variables in the prediction of the
behavior of the multiphase mixture. Most multiphase flow prediction methods use the
superficial gas and liquid velocities as correlating parameters. The superficial velocities
are defined as the in situ volumetric flowrate of that phase divided by the total pipe cross-
sectional area. In oil field units, this corresponds to:
CPTC NOVEMBER 1994 7
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
Vsg = Superficial Gas Velocity, ft/sec
= (actual ft3/sec of gas) / (pipe cross-sectional area, ft2)
Vsl = Superficial Liquid Velocity, ft/sec
= (actual ft3/sec of liquid) / (pipe cross-sectional area, ft2)
Mixture Velocity
The mixture velocity (Vm) is the volumetric average velocity of the gas-liquid mixture. It
is equal to the sum of the gas and liquid superficial velocities.
Vm = Vsg + V sl
Slip and Liquid Holdup
Liquid holdup is defined as the volume fraction of the pipe that is filled with liquid. It is
the most important parameter in estimating the pressure drop in inclined or vertical flow.
It is also of prime importance in sizing downstream equipment, which must be able to
operate properly when the liquid holdup in the line changes because of pigging or rate
changes.
If there was no slip between the gas and liquid phases, both phases would move through
the pipe at the mixture velocity. The liquid would occupy the volume fraction equivalent
to the ratio of the liquid volumetric flowrate to the total volumetric flowrate. In
multiphase flow terminology, this equates to the liquid holdup being equal to the ratio
between the superficial liquid velocity and the mixture velocity:
Hlns = No-slip liquid holdup
= Vsl / Vm
Under most conditions, however, the liquid phase, which is more dense and viscous,
moves more slowly than the gas. When this occurs, the liquid holdup (Hl) is greater than
the no-slip holdup.
CPTC NOVEMBER 1994 8
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
H l > H ln s
Under these conditions, the actual gas velocity is greater than the mixture velocity, and
the actual liquid velocity is smaller than the mixture velocity. The expressions for the
actual gas velocity (Ug) and actual liquid velocity (Ul) are:
Vsg
Ug =
1 − Hl
V
U l = sl
Hl
For small diameter, low pressure piping, there is frequently a vast difference between Ug
and Ul. For field piping, there is generally less slip between the phases, and the flow may
approximate no-slip flow in dispersed bubble and annular flows.
It is possible to get conditions where the liquid holdup is less than no-slip, but this only
occurs over a small range of flowrates in downwardly inclined pipes.
Pressure Gradient
Two definitions of the term "pressure gradient" are used in the literature. In this guide, the
term "pressure gradient" will be used to describe the pressure drop per unit length of pipe,
(Pin - Pout)/L. In many papers, the term "pressure gradient" is used to denote the pressure
change per unit length (dp/dx = (Pout - Pin)/L). The magnitude of the pressure gradient is
the same in either definition, but the sign of the pressure drop per unit length is usually
positive, while the sign of dp/dx is usually negative. Most people prefer to work with
positive numbers, so the majority of people use the pressure drop per unit length
definition. The choice of the definition is somewhat arbitrary, but it should be noted when
reading the multiphase flow literature, and working with some of the available software.
3-Phase Flow vs. 2-Phase Flow
In most of this guide, the discussion will consider 2-phase flow, or gas-liquid flow. In the
majority of oil field applications, there will actually be 3 phases present (gas, oil, and
water). The rigorous prediction of 3-phase flow is in its infancy. 3-Phase flow methods
CPTC NOVEMBER 1994 9
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
are not generally available, so most simulators use 2-phase models with a mixed liquid
stream using averaged properties for the oil and water. The use of 2-phase models with
averaged properties generally gives acceptable results unless either: emulsions are present;
or the flowrates are low enough to cause stratification of all three phases. These problems
are discussed in more depth in Section 3.2.1
Mechanistic Models vs. Correlations
The prediction of multiphase flow behavior has improved considerably during the 50+
years that the subject has been studied. For many years, multiphase flow prediction
methods were correlations, based on curve fits of experimental data. The correlations
frequently used arbitrarily selected variables and were based on limited databases,
consisting almost entirely of low pressure, small diameter data. Extrapolations of these
prediction methods to field conditions frequently proved to be seriously in error. In the
1960s and 1970s, several investigators undertook experimental studies to try to
understand the fundamental mechanisms of the various flow regimes. In the past 15 years
models have been developed, which are based on simulation of these mechanisms. These
models, referred to as mechanistic models, have proven to extrapolate best to field
conditions.
Newtonian vs. Non-Newtonian Fluids
Most condensates and crude oils follow Newton’s law of viscosity, which is defined as:
dv x
τ yx = µ
dy
where τyx = shear stress
µ = viscosity
vx = velocity
y = distance
Some liquids, however, exhibit behavior that is very different from Newton's law. These
fluids are referred to as non-Newtonian. In the oil field, examples of non-Newtonian fluids
are drilling muds, polymeric additives, and crude oils below their cloud point.
CPTC NOVEMBER 1994 10
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
Flowline simulators are based on Newtonian fluids. If a non-Newtonian liquid is present,
the simulator must be “tricked” into giving a Newtonian viscosity equivalent to the actual
viscosity at the given temperature and shear stress. The methods of doing this are beyond
the scope of this guide.
CPTC NOVEMBER 1994 11
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
Figure I:1-1 Flow Regimes in Horizontal Flow
CPTC NOVEMBER 1994 12
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
Figure I:1-2 Flow Regimes in Vertical Flow
CPTC NOVEMBER 1994 13
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
SECTION 2.0 - OVERVIEW OF MULTIPHASE FLOW FUNDAMENTALS
2.1 Design Criteria
The majority of lines are sized by use of three primary design criteria: available pressure
drop; allowable velocities; and flow regime. In some cases, a more optimal line size may
be found that better suits the overall design of the pipeline system. These considerations
will be discussed later in the transient modeling section of the guide. A description of each
of the primary design criteria follows in Sections 2.2, 2.3, and 2.4.
2.2 Velocity Guidelines
The velocity in multiphase flow pipelines should be kept within certain limits in order to
ensure proper operation. Operating problems can occur if the velocity is either too high
or too low, as described in the following sections.
It is difficult to accurately define the point at which velocities are "too high" or "too low".
This section of the guide will try to quantify limits, but these limits should be considered
as guidelines and not absolute values.
Maximum Velocity
For the maximum design velocity in a pipeline, API RP-14E recommends the following
formula:
C
Vmax = (Eqn. 2.1)
ρ ns
where Vmax = Maximum mixture velocity, ft/sec
ρns = No-slip mixture density, lb/ft3
=
(ρ g )
Vsg + (ρ l Vsl )
Vm
ρg = Gas Density, lb/ft3
CPTC NOVEMBER 1994 14
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
ρl = Liquid Density, lb/ft3
C = Constant, 100 for continuous service, 125 for intermittent service.
This equation attempts to indicate the velocity at which erosion-corrosion begins to
increase rapidly. Many people think this equation is an oversimplification of a highly
complex subject, and as a result, there has been considerable controversy over its use.
For wells with no sand present, values of C have been reported to be as high as 300
without significant erosion/corrosion. For flowlines with significant amounts of sand
present, there has been considerable erosion-corrosion for lines operating below C = 100.
The use of the API equation has been the subject of several research projects. It has been
generally agreed that the form of the equation is not sophisticated enough, and should
include additional parameters. Unfortunately, no other equation has been proposed which
has gained acceptance in the industry as an alternative to the API equation. As a result,
the recommended maximum velocity in the pipeline is the value calculated from Equation
2.1 with a C value of 100.
It should be noted that Equation 2.1 is also used by many people as an estimate of the
maximum velocity for noise control.
For additional guidance on the use of the API equation, refer to Chevron’s Piping Manual.
Minimum Velocity
The concept of a minimum velocity for the pipeline is an important one and should be
considered in the design of the line. Turndown conditions frequently govern the design of
the downstream equipment. Velocities that are too low are frequently a greater problem
than excessive velocities, so that the designer’s natural tendency to add "a bit of fat" to the
design by increasing pipe diameter can cause severe problems in the operation of the line
and the downstream facilities.
At low velocities, several operating problems may occur:
a) Water may accumulate at low spots in the line. If there is an appreciable amount of
CO2 or H2S in the well stream, this water may be very corrosive.
CPTC NOVEMBER 1994 15
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
b) Liquid holdup may increase rapidly at low mixture velocities. A large accumulation of
liquid may cause problems in downstream separators or slug catchers if the line is
pigged or the rate is changed rapidly.
c) Low velocities may cause terrain induced slugging in hilly terrain pipelines and
pipeline-riser systems.
It isn’t possible to give a simple formula quantifying the velocity when the phenomena
discussed above will occur. The minimum velocity depends on many variables, including:
topography; pipeline diameter; gas-liquid ratio; and operating conditions of the line. A
ball-park value for the minimum velocity would be a mixture velocity of 5-8 ft/sec. The
actual value of the minimum velocity can only be quantified by simulation of the system
using the methods discussed in Section 5.2.2.
2.3 Flow Regimes
As discussed in Section 1, the gas and liquid in the pipe are distributed differently in each
of the four major flow regimes (stratified, annular, slug, and dispersed bubble flows). The
prediction of the correct flow regime is important for several reasons. The flow regime
prediction can show whether the line will operate in a stable flow regime or an unstable
regime. The prediction of liquid holdup and pressure drop are highly dependent on the
flow regime, with each regime exhibiting different behavior when the design variables are
changed.
The transitions between the flow regimes are frequently depicted in a flow regime map,
such as that shown in Figure I:2-1. The flow regime map typically has the superficial gas
velocity (Vsg) on the X-axis and the superficial liquid velocity (Vsl) on the Y-axis. As
discussed later in this section, the flow regime map is only valid for a single point in the
pipeline. As the angle of inclination, pressure and temperature change with position in the
pipeline, the flow regime map also changes.
Some general comments, however, can be made about the flow regime transitions.
Stratified flow occurs at low superficial gas and liquid velocities. Dispersed bubble flow
occurs at high superficial liquid velocities. Annular flow occurs at high superficial gas
CPTC NOVEMBER 1994 16
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
velocities. Slug flow occurs at moderate superficial gas and liquid velocities. Figure I:2-2
shows a typical flow regime map for vertical flow.
Many experimental studies of the transitions between the flow regimes for various systems
have been made, and many flow regime transition prediction methods have been published.
Some of these methods work fairly well, but most are poor. The designer needs to
carefully choose the method that will work best for the set of conditions. The best
methods are discussed in the remainder of this section.
Experimental studies of flow regime transitions have shown that each of the flow regime
boundaries reacts differently to changes in the system variables. The following table shows
the sensitivity of the transitions to changes in the major system variables:
Transition Slug to Slug to Slug to Stratified to
Variable Dispersed Annular Stratified Annular
Bubble
Angle of Small Effect Moderate Strong Effect Strong Effect
Inclination Effect
Gas Density Small Effect Strong Effect Strong Effect Strong Effect
Pipeline Small Effect Small Effect Strong Effect Moderate
Diameter Effect
Liquid Physical Moderate Small Effect Moderate Moderate
Properties Effect Effect Effect
Many people have attempted to develop simple flow regime maps, usually using some
arbitrary dimensionless parameter on each axis (e.g. Baker, Beggs & Brill). These
methods are inherently inaccurate since no single parameter can model the sensitivity
effects shown in the previous table. The only flow regime map prediction methods that
have been effective for a wide range of conditions are those using mechanistic models to
estimate the flow regime transitions.
CPTC NOVEMBER 1994 17
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
In 1976, Taitel and Dukler published a landmark article describing a method of predicting
flow regime transitions by modeling the mechanism of each transition. By modeling each
transition, this method can show the same type of behavior observed in the experimental
work. The original Taitel-Dukler paper covered flow regime transitions in near horizontal
flow only, and one of the transitions (slug-dispersed bubble) is very much in error. Taitel
and his co-workers at the University of Tel Aviv have subsequently published several
articles that expand the range of angles of inclination and correct the errors in the original
paper. The Taitel-Dukler paper and the latest paper from Tel Aviv model flow regime
transitions for all angles of inclination.
The Taitel, et al. methods give reasonably good predictions of the various flow regime
transitions, and the accuracy of the predictions has improved with each revision.
Another approach to the modeling of flow regime transitions is the method used in the
OLGAS method. It employs mechanistic models of each flow regime and links the models
by the assumption that the flow regime giving the lowest liquid holdup is the correct one.
This assumption holds up well in practice. The OLGAS method predicts flow regime
transitions with similar accuracy to the Taitel, et al. models.
Within Chevron, there are several programs available for flow pattern prediction.
Pipephase will print a flow regime map based on the Taitel-Dukler method for near
horizontal flow and the Taitel-Dukler-Barnea model for near vertical flow. Unfortunately,
these methods are the oldest and weakest of this family of methods. Two programs are
available within CPTC that incorporate the latest versions of the Taitel, et al. models.
These programs are FLOPAT, developed by Tulsa University, and FLEX, developed by
Advance Multiphase Technology. CPTC should be consulted if it is desired to use these
programs.
As in many aspects of multiphase flow, the flow regime prediction methods are not exact.
Errors of +/- 25% for the transition velocities are typical, even for the best prediction
methods. If the Taitel-Dukler map is used, the designer should be aware of the gross
errors in the slug to dispersed bubble transition. The errors for this transition can be
1000%. The dispersed bubble to slug transition typically occurs at a superficial liquid
velocity of about 10 ft/sec. Taitel-Dukler frequently predicts this transition velocity to be
50-100 ft/sec.
CPTC NOVEMBER 1994 18
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
2.4 Pressure Gradient
In most pipelines, the pipeline diameter is determined by the allowable pressure drop in the
line. The overall pressure gradient is composed of three additive elements:
a) pressure drop due to friction;
b) pressure changes due to elevational effects;
c) accelerational losses.
The calculation of the constituent parts of the pressure gradient will be discussed in the
next three sections.
The Chevron Fluid Flow Manual contains a good discussion of these pressure loss terms
for single phase flow and can be consulted as a reference.
2.4.1 Frictional Losses
In multiphase flow, frictional losses occur by two mechanisms: friction between the gas or
liquid and the pipe wall; and frictional losses at the interface between the gas and liquid.
The friction calculations, therefore, are highly dependent on the flow regime, since the
distribution of liquid and gas in the pipe changes markedly for each regime.
In stratified flow, there is wall friction between the gas and the pipe wall at the top of the
pipe, and wall friction between the liquid and the wall at the bottom of the pipe. There is
also friction between the gas and liquid at the gas-liquid interface. The interfacial friction
can be similar in magnitude to the wall friction if the interface is smooth, or it can be
considerably higher if waves are present.
In annular flow, there is friction between the liquid film and the wall. There is also
considerable interfacial friction between the gas in the core of the pipe and the liquid film.
The interfacial friction is usually the larger component.
In dispersed bubble flow, friction occurs between the liquid and the wall. There is
negligible interfacial friction between the gas and liquid.
CPTC NOVEMBER 1994 19
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
Slug flow has several frictional components. In the slug, the friction losses are caused by
the friction between the liquid and the pipe wall. In the gas bubble, the frictional
components are the same as in stratified flow, namely gas and liquid friction with the pipe
walls and interfacial friction between the gas and liquid. The friction loss in the slug is
usually much higher than the losses in the bubble.
2.4.2 Elevational Losses
Elevational losses may be the major pressure loss component in vertical flow and flow
through hilly terrain. The calculation of elevational losses is governed by the following
equation:
dp ρ g sinα
= mix
dx elev 144g c
where: (dp/dx)elev = Pressure gradient due to elevation, psi/ft
ρmix = Mixture Density, lb/ft3
= (ρl) (Hl) + (ρg) (1-Hl)
Hl = Liquid Holdup
g = Acceleration due to gravity, 32.2 ft/sec2
α = Angle of inclination
gc = Gravitational conversion factor, 32.2 lb-ft/(lbf-sec2)
In order to calculate the elevational gradient, the liquid holdup must be determined. The
holdup in each flow regime has its own sensitivity to the important operating variables. A
summary of the effect of the major operating variables on the liquid holdup is:
CPTC NOVEMBER 1994 20
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
Slug Flow Annular Stratified Flow Dispersed
Flow Bubble Flow
Superficial Gas Strong Strong Strong Strong
Velocity
Superficial Liquid Strong Strong Strong Strong
Velocity
Gas Density Moderate Strong Strong None
Pipeline Diameter Moderate Weak Weak Weak
Angle of Moderate Weak Very Strong None
Inclination
Liquid Properties Moderate Moderate Moderate Weak
As seen in the previous table, the influence of the major variables on the holdup is very
different for each of the flow regimes. As a result, it is impossible to develop a general
holdup correlation that will apply to all the flow regimes. Unfortunately, almost all of the
commonly used holdup methods available in commercial software try to do this. They
work poorly over much of the operating range as a result. The only way to accurately
predict liquid holdup is to use mechanistic models for each of the flow regimes. The
accuracy of available holdup methods is discussed further in Section 3.2.4.
2.4.3 Acceleration Losses
Although acceleration losses are present for all flow regimes, they are only significant for
two flow regimes: annular flow and slug flow. The mechanisms for the losses in these two
flow regimes are very different and will be discussed separately.
In single phase flow, acceleration losses can be calculated from Bernoulli’s equation.
Acceleration losses represent the change in kinetic energy as the fluid flows down the
pipe. The expression for acceleration gradient is:
dp ρ V dV
=
dx accel 144 g c dx
CPTC NOVEMBER 1994 21
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
where: ρ = Density, lbm/ft3
V = Velocity, ft/sec
For multiphase flow, the same type of relationship holds except that it refers to the flow
of the mixed phase fluid. Most methods assume a no-slip mixture and use the no-slip
mixture density (ρns) and the mixture velocity (Vm) in the calculation of acceleration
losses.
The kinetic energy acceleration losses are small for most oil industry applications. The
main exception is high velocity flow through low pressure piping. Flare systems would be
an example of piping that has high acceleration losses. Acceleration may account for 30-
50% of the overall pressure loss in such lines. For a typical high pressure gathering system
line, acceleration is usually less than 1% of the total drop and is frequently ignored.
Please note that the present version of Pipephase, 6.02, does not properly account for
acceleration losses, and, as a result, is not suitable for use in flare system design.
In slug flow, another source of acceleration contributes significantly to the total pressure
drop. As a slug propagates down the pipeline, it overruns and entrains the slower moving
liquid from the film ahead of the slug front. Accelerating the liquid from the film velocity
to the slug velocity can produce significant pressure losses. The acceleration loss may be
anywhere from <1% to more than 50% of the total pressure drop. Mechanistic models
include this loss, while most of the correlation based methods ignore this loss.
2.4.4 Allowable Pressure Drop
No clear-cut criteria exist for determining the amount of pressure drop to be allowed in a
pipeline design. Allowable pressure drop is a function of the parameters of the system
being designed. The following are some guidelines for specific systems:
a) For plant piping, rule of thumb values for pressure gradients, such as a frictional
gradient of 0.2-0.5 psi per 100 ft. of equivalent length, are generally used.
b) In the design of a gathering system, the ideal way to choose allowable pressure
drops is to simulate the system from the reservoir through the processing plant as a
function of time. This approach will account for the changes in reservoir pressure,
CPTC NOVEMBER 1994 22
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
flowrate, and composition that the gathering system must handle during the life of
the field.
c) If it isn’t feasible to do the rigorous simulations for a gathering system, the allowable
pressure drop can be estimated from the initial wellhead pressure and the processing
plant inlet separator pressure. A rule of thumb to use for this method is to take 1/3
of the difference between the wellhead pressure and the separator pressure as the
allowable pressure drop in the pipeline. The remainder of the difference would equal
the initial choke pressure drop. This approach would allow for future operation at
reduced reservoir pressures.
d) A rule of thumb estimate of allowable pressure drop for long distance
gas/condensate pipelines is to allow 10-20 psi per mile for frictional pressure drop at
design rates.
2.5 Pressure Gradient Calculations
As indicated in sections 2.4.1 to 2.4.3, the calculation of the pressure gradient for
multiphase flow is very complicated. Hundreds of methods have been proposed to predict
pressure drops, but only a few methods work well over a wide range of conditions. The
best available methods are discussed in Section 3.2.4.
CPTC NOVEMBER 1994 23
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
2.6 Section Highlights
Points to remember from Section 2.0 -
• No other equation has gained acceptance in the industry like the API equaton. The
recommended maximum velocity in the pipeline is the value calculated from Equation 2.1
with a C value of 100.
• The Taitel et al. Methods give reasonably good predictions of the various flow regime
transitions. The accuracy of the predictions has improved with each revision.
• The OLGAS method predicts flow regime transitions with similar accuracy to the Taitel et
al. methods.
• If the Taitel-Dukler map is used, the designer should be aware of the gross errors in the
slug to dispersed bubble transiton.
• Overall pressure gradient is composed of three additive elements:
− pressure drop due to friction
− pressure changes due to elevational effects
− accelerational losses
• Frictional calculations are highly dependent on the flow regime, since the distribution of
liquid and gas in the pipe changes markedly for each regime.
• Elevational losses may be the major pressure loss component in vertical flow and flow
through hilly terrain.
• Using mechanistic models for each flow regime is the only way to accurately predict liquid
holdup.
• Kinetic energy acceleration losses are small for most oil industry applications. The main
exception is high velocity flow through low pressure piping.
• Pipephase 6.02 does not properly account for acceleration losses and is not suitable for
use in flare system design as a result.
• For plant piping, rule of thumb values for pressure gradients, such as a frictional gradient
of 0.2-0.5 psi per 100 ft. of equivalent length, are generally used.
• The allowable pressure drop for a gathering system can be estimated from the initial
wellhead pressure and the processing plant inlet separator pressure. The rule of thumb for
this method is to take 1/3 of the difference between the wellhead pressure and the
separator pressure as the allowable pressure drop in the pipeline.
CPTC NOVEMBER 1994 24
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
• The rule of thumb for estimating allowable pressure drop for long distance gas/condensate
pipelines is to allow 10-20 psi per mile for frictional pressure drop at design rates.
CPTC NOVEMBER 1994 25
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
Figure I:2-1 Horizontal Flow Regime Map
CPTC NOVEMBER 1994 26
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
Figure I:2-2 Vertical Flow Regime Map
CPTC NOVEMBER 1994 27
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
SECTION 3.0 - STEADY STATE DESIGN METHODS
3.1 Pipeline Design Methods
As stated in the previous sections, the pipeline designer needs to estimate the pressure
drop, flow regime, and velocities in the line in order to select the proper line size. The
calculation of these parameters is laborious and is usually done by computer simulation.
Line sizing is usually performed by use of steady state simulators, which assume that the
pressures, flowrates, temperatures, and liquid holdup in the pipeline are constant with
time. This assumption is rarely true in practice, but line sizes calculated from the steady
state models are usually adequate.
Within Chevron, Pipephase and PIPEFLOW-2 are available for steady state pipeline
simulation.
For a more rigorous pipeline sizing, the simulations could be done using transient
simulators. Transient simulators allow changes in parameters such as inlet flowrate and
outlet pressure as a function of time, and calculate values for the outlet flowrates,
temperatures, liquid holdup, etc. as a function of time. If the line is operating in slug flow,
the line size calculated from the transient model may be different from that calculated
from a steady state simulator.
The principal uses of transient simulators are in the design of downstream equipment and
the development of operating guidelines. Transient simulators can model transient
behavior such as slug flow, pigging, rate changes, etc.
Transient simulators are quite new, developed in the last 10 years, and are not in general
use. Chevron has used the OLGA program for transient flowline analysis on several
projects, utilizing outside consulting services. CPTC developed an in-house transient
simulator, but it currently does not have as many features as the commercially available
codes.
The use of steady state models will be further discussed in Section 3.2, and transient
modeling will be briefly discussed in Section 4.
CPTC NOVEMBER 1994 28
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
3.2 Steady State Simulators
This section contains some general guidelines on the use of steady state simulators.
Although there are several steady state programs available, the discussion will center on
the use of Pipephase, which is Chevron’s currently recommended simulator. The topics
covered include:
a) Phase Equilibrium and Physical Properties
b) Pipeline Elevation Profile
c) Heat Transfer
d) Recommended Methods for Pressure Drop, Liquid Holdup, and Flow Regime Prediction
e) Interpretation of Results
3.2.1 Phase Equilibrium and Physical Properties
Accurate prediction of the phase behavior and physical properties for the fluid flowing
through the pipeline is essential to a good simulation of the pipeline operation. The
estimates of these parameters depend in large part on the quality of the input data
available.
During conceptual design work, the only data available may be an estimate of the oil rate
and gas-oil ratio. After well tests have been performed, compositions of the wellstream
and PVT data may be available as well as projections of the flowrates of oil, gas and water
as a function of time. Obviously, as the accuracy of the input data improves, the quality of
the pipeline simulation improves.
Pipephase has two fundamentally different models available within it for estimation of
phase behavior and physical properties. The black oil model estimates the phase behavior
and physical properties by use of a series of correlations that are based on operating
temperature, pressure and some global parameters such as specific gravity of the oil and
gas. Compositional models use an equation of state to estimate the quantity of liquid and
gas at the operating conditions; then, correlations are used to estimate the physical
properties.
The decision on whether to use the black oil model or compositional modeling depends on
the available information and the type of system that is being modeled.
CPTC NOVEMBER 1994 29
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
The choice of models for gas-condensate and volatile oil systems is clear. Compositional
models should be used for any gas-condensate or volatile oil system. This recommendation
covers gas-oil ratios above about 3500 SCF/bbl.
For lower gas-oil ratios, the choice of models is more difficult. Compositional models
should give more accurate phase equilibrium results, but the physical property estimates
from the compositional models may not be as good as the black oil model. (Section 6-1
illustrates this point.) As a result, it cannot be stated categorically that either the black oil
model or the compositional model is superior for low gas-oil ratio systems. General
practice with Pipephase has been to use the black oil model for lower gas-oil ratio streams.
The accuracy of compositional modeling depends, in a large part, on the characterization
of the heavy ends of the well stream. The materials heavier than hexane (C6+) are usually
characterized by use of pseudo-components or cuts. The heavy ends could be
characterized by one C6+ cut, or by a series of cuts corresponding to various boiling
ranges. In general, the accuracy of the predictions increases when more cuts are used.
Pipephase requires two of the following parameters in order to characterize a cut: specific
gravity; molecular weight; or normal boiling point. In many cases, the mole fractions for
cuts heavier than C6 may have been measured in the PVT analysis, but cut properties
were not noted. In cases like this, the customary assumption is to use the properties of the
corresponding normal paraffin as the cut properties. This adds some error to the analysis,
but it is unavoidable in many circumstances.
If tests of the phase equilibrium and physical properties have been done as part of the
wellstream analysis, Pipephase allows the users of the black oil model to adjust the model
predictions for solution GOR, densities, and liquid viscosity to match experimental
values. The pipeline predictions after PVT matching should be considerably better than
those obtained with use of the standard correlations.
If the compositional model is used in Pipephase, the only variable that can be easily
manipulated to match experimental data is the liquid viscosity. Pipephase does not have an
option that will automatically adjust the phase equilibrium calculations to match
experimental data. It is possible to manually modify the phase equilibrium calculations, but
CPTC NOVEMBER 1994 30
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
it requires considerable effort, and the methods to do this are beyond the scope of this
guide.
Although it is possible to get good estimates of the phase equilibrium for 3-phase (gas-oil-
water) systems, the available software does not allow rigorous simulation of threephase
flow. The models present in Pipephase can only do two-phase (gas-liquid) flow
calculations. Pipephase averages the properties of the liquid hydrocarbon and liquid
water, and uses those average in the two-phase flow methods. Volumetric averaging,
however, may not give good values for the viscosity and surface tension of the mixture. If
the oil and water form an emulsion, the viscosity estimate may be off considerably using
simple volumetric averaging, because the viscosity of an emulsion can be as much as 50
times as high as the viscosity of the oil or water. If it is likely that an emulsion will form,
the Woeflin method, which is available in Pipephase, should be used to estimate the
viscosity of the emulsion.
3.2.2 Pipeline Elevation Profile
The pipeline elevation profile used in the simulation can have a significant impact on the
calculated pressure drop. Because the liquid holdup in upwardly inclined flow is greater
than the holdup in downward flow, the elevational pressure drop in uphill legs is greater
than the pressure recovery in downhill legs. As a result, elevational losses can account for
much of the pressure drop in hilly terrain pipelines, even if the inlet and outlet of the line
are at the same relative elevation.
If the velocities in the line are high, the uphill and downhill holdups may be close. As the
mixture velocity decreases, there will be an increasing difference between uphill and
downhill holdups.
The following table illustrates how sensitive the liquid holdup is to mixture velocity at
various angles of inclination from horizontal. The feed stream is a gas-condensate with
about 4 bbl/mm SCF of liquid present. (The values shown are predictions of the OLGAS
model.)
CPTC NOVEMBER 1994 31
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
MIXTURE VELOCITY FT/SEC
ANGLE, 2.7 4.1 5.4 8.1 16.2
DEGREES
-2.0 0.0041 0.0053 0.0064 0.0091 0.0115
-1.0 0.0052 0.0068 0.0085 0.0108 0.0122
-0.5 0.0068 0.0087 0.0108 0.0124 0.0126
0.0 0.0224 0.0218 0.0198 0.0156 0.0131
0.2 0.5797 0.4134 0.2249 0.0179 0.0134
0.5 0.5961 0.4988 0.3846 0.0317 0.0135
1.0 0.5997 0.5000 0.4314 0.3023 0.0144
2.0 0.6009 0.5024 0.4337 0.3428 0.0158
Using the values in the above table, a comparison of two models for a given section of a
pipeline has been made. In the first model, the pipeline segment consists of two equal
length sections of -0.5 degree and +0.5 degree each. The second model consists of a
single horizontal pipeline segment. The liquid holdups for the two models are:
MIXTURE VELOCITY, HOLDUP FOR -0.5 HOLDUP FOR
FT/SEC DEGREE AND +0.5 HORIZONTAL MODEL
MODEL
2.7 0.3015 0.0224
4.1 0.2538 0.0218
5.4 0.1977 0.0198
8.1 0.0221 0.0156
16.2 0.0131 0.0131
CPTC NOVEMBER 1994 32
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
The liquid holdups are far apart at low velocities and are the same at higher velocities.
This comparison makes two points:
• The pipeline profile must be realistic if the calculations of liquid holdup and pressure
drop are to be accurate.
• Low velocities cause severe problems in prediction of the pipeline performance.
For very low velocities, it would be necessary to know the pipeline elevation profile
within an accuracy of about one pipe diameter in order to get accurate holdup predictions.
This is generally not practical.
In many cases, the pipeline topography is not known when the preliminary pipeline sizing
calculations are run. Frequently, in offshore pipeline design, the designer only knows
water depths at subsea wells or platforms. Instead of assuming a straight line pipeline
profile, it is recommended that the designer add some terrain features to the pipeline
profile to simulate hills and valleys that are inevitably present in the actual profile.
To improve the accuracy of the simulation, many calculation segments should be used in
simulating the pipeline. Increasing the number of calculation segments always improves
the accuracy of the simulation, but it increases the computer simulation time. The number
of segments required depends on how rapidly the temperature, pressure and holdup are
changing in the pipeline. For a system with rapid changes in pressure, e.g. flare systems,
the number of calculation segments should be greater. If the temperature and pressure are
changing slowly, a more coarse grid can be used to simulate the pipeline.
3.2.3 Heat Transfer
The temperature profile along the pipeline is important in many circumstances. The
amount of condensation of liquids along a gas-condensate line, for instance, has a large
impact on the pressure drop and liquid holdup in the line. Hydrate and wax deposition may
occur in the line, requiring accurate estimates of temperatures. Corrosion is a strong
function of temperature, so good heat transfer estimates are vital to corrosion prediction.
To properly model the heat transfer between the pipeline and the surroundings, it is
necessary to have information on the following:
CPTC NOVEMBER 1994 33
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
• thicknesses of the pipewall, pipeline coatings and insulation
• whether the pipe is buried or exposed
• the burial depth of the line
• type of surroundings
• ambient temperatures
• thermal conductivities of the pipe, coatings and insulation.
With this information the programs can calculate heat transfer coefficients, which are then
used to calculate the temperature profile in the pipeline.
Values of the thermal properties for various materials can be read from the following
table. Note that the Chevron Fluid Flow manual also has an extensive list of thermal
conductivities for various types of materials.
Material Thermal Specific Heat, Density, lb/ft3
Conductivity, Btu/lb-degF
Btu/hr-ft-degF
Carbon Steel 26 0.11 490
Stainless Steel 8-13 0.11 488
Concrete 0.75-1.2 0.10 147-200
(Saturated)
Onshore Soil (Wet) 1.35 0.20 90-110
Subsea Sandy Soil 1.25-1.50 0.30 105-115
Coal Tar Epoxy 0.20 0.35 92
Fusion Bonded 0.15 0.32 75-90
Epoxy
Neoprene 0.12-0.15 0.50 90
Polyurethane Foam 0.011-0.022 0.38 2-12
CPTC NOVEMBER 1994 34
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
At the early stages of a project, there may not be enough information to enable rigorous
calculation of the heat transfer coefficient.. The following are rule of thumb values for heat
transfer coefficients for subsea flowlines, which can be used in these instances:
Applications U Value, BTU/hr/ft2/degF
Wells 2
Risers 20-40
Buried Pipelines 1-3
Concrete Coated Nonburied Pipelines 3-5
Nonburied Pipelines without Concrete 5-10
For gas/condensate pipelines, temperature loss by the Joule-Thomson expansion (J-T)
effect can be significant. In many gas pipelines, the temperature of the gas leaving the
pipeline is less than ambient because of the J-T effect.
Several concerns arise when using Pipephase for heat transfer calculations:
a) Pipephase only estimates temperature loss by the Joule-Thomson expansion cooling
effect if the compositional model is used. The J-T effect is ignored in black oil
simulations.
b) The default velocity of water flowing past a pipeline is 10 miles per hour in
Pipephase. This velocity is generally too high. More typical values are 1 to 3 ft/sec
(0.7-2 mph).
c) The Pipephase viscosity routine does not estimate viscosities at temperatures below
60 degrees F. At lower temperatures, it uses the viscosity at 60 degrees F. This can
lead to errors for pipelines in deep water or cold climates.
d) The thermal conductivity for saturated concrete is much higher than that for dry
concrete. The saturated concrete value should be used for subsea pipelines with
concrete coating.
CPTC NOVEMBER 1994 35
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
e) Unless a value is entered for Hrad, radiation is ignored in the heat transfer calculations.
For subsea or buried pipelines, radiation is negligible, but it can be a significant effect
for surface flowlines.
f) The convective heat transfer routines in Pipephase are not very rigorous. Errors in
heat transfer calculations can occur for systems in which convection is the prime
source of heat transfer.
3.2.4 Recommended Methods for Pressure Drop, Liquid Holdup, and Flow
Regime Prediction
There have been hundreds of multiphase flow design methods developed in the past 50
years. Most computer programs contain dozens of options to select for pressure drop,
liquid holdup, and flow regime predictions. Most of these methods only have small ranges
in which their predictions are accurate. This section of the guide discusses this problem
and gives some recommendations on which methods to use for certain applications.
Most of the methods available in Pipephase are correlations based on data taken in small
diameter (0.5-2 inch) test loops having an air-water flow operating at nearly atmospheric
pressure. The correlations developed from these data sets frequently do not include the
effects of all the key variables, such as pressure, because changes in these variables were
not studied in the experimental work. These correlations extrapolate poorly from field
conditions.
In the past 10 years, the development of mechanistic modeling has created a marked
improvement in prediction capabilities. As noted in Section 1.2, mechanistic models
attempt to model the physical phenomena associated with each flow regime. Mechanistic
models solve a set of simultaneous equations developed for a specific flow regime.
Correlations for a few key parameters are required in order to solve the equation set.
Mechanistic models extrapolate to field conditions much better than correlations because
the mechanistic models account for the effects of all the major variables.
Several mechanistic models have been developed in the past few years. Tulsa University
has developed models for near vertical flow (Ansari) and a general model covering all
inclinations (Xiao). The physics in these models are good, but the correlations built into
them are based solely on small diameter, low pressure data. The OLGAS model is
CPTC NOVEMBER 1994 36
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
currently the best available method for general multiphase flow calculations. OLGAS is
based on a wide range of data (diameter from 1 to 8 inches, pressures from atmospheric
to 1400 psi), and it extrapolates best to field conditions.
OLGAS is a proprietary program that has not been available within Chevron. As this
guide is being written, however, negotiations are underway to add OLGAS to Pipephase
and several other programs as options. If OLGAS becomes available, it is the
recommended method for prediction of pressure drop, liquid holdup and flow regime.
Methods are available that are as good or slightly better than OLGAS in certain ranges,
but they are not as good overall.
The following methods can be used in Pipephase as a check of OLGAS or as the design
method if OLGAS is not available:
a) Pressure Drop
1) Near Horizontal Low Gas-Oil Ratio - Beggs and Bril1 (Moody) is good.
2) Near Horizontal Gas/Condensate - Eaton-Oliemans is good for relatively high
velocities. All of the methods are poor for low velocities.
3) Near Vertical Gas/Condensate - Both Gray and Hagedorn-Brown are good.
4) Near Vertical Gas/Oil - Hagedorn and Brown is good.
5) Inclined Up - Nothing is good; Beggs and Brill (Moody) is fair.
6) Inclined Down and Vertical Down - Everything is poor. Use Beggs and Brill
(Moody), but answers may be suspect at times.
b) Liquid Holdup _
1) Near Horizontal Low Gas-Oil Ratio - Beggs and Brill (Moody) is O.K.
2) Near Horizontal Gas/Condensate Lines - All available methods are poor. The
Eaton holdup correlation is better than the other methods.
3) Near Vertical Gas/Condensate - The most accurate method is no-slip.
4) Near Vertical Gas/Oil - Hagedorn and Brown is pretty good.
5) Inclined Up - Beggs and Brill (Moody) is usable for low GOR lines, nothing is
accurate for gas/condensate. If gas velocities are high, use no-slip; otherwise use
CPTC NOVEMBER 1994 37
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
Beggs and Brill (Moody). The user must be careful because the holdups can be a
factor of 10 in error in some cases.
6) Inclined Down and Vertical Down - Everything is poor. Use Beggs and Brill
(Moody), but answers may be suspect.
c) Flow Regimes
1) The Taitel-Dukler flow regime map is as good as OLGAS for near horizontal
flow with the exception of the slug-dispersed bubble boundary. This boundary is
very poorly predicted. If this method is used, it is recommended that a value of
~10 ft/sec be used as the superficial liquid velocity for the slug-dispersed bubble
transition rather than the Taitel-Dukler prediction.
2) The Taitel-Dukler-Barnea map for near vertical flow is also as accurate as
OLGAS.
On occasion, the conditions for a simulation may cause otherwise good multiphase flow
methods to give erroneous results. It is usually a good idea to spot-check the results by
use of another method to ensure that the answers are reasonable. If there is a wide
variance in results, CPTC should be contacted for guidance.
3.2.5 Interpretation of Results
When a multiphase simulator such as Pipephase is run, the interpretation of the results can
be difficult. The following section provides assistance in understanding Pipephase output,
and ensuring that the design criteria for the line (velocities, flow regime, and allowable
pressure drop) are met.
As discussed in Section 2.2, the velocity in the pipeline should be kept within a limited
range. Calculation of the velocities from a Pipephase output is not straightforward. The
designers of Pipephase chose to include the actual gas and liquid velocities in their output
table rather than the superficial gas and liquid velocities which are needed in the erosional
velocity calculations. As discussed in Section 1.2, the superficial and actual velocities are
related by simple formulas:
Vsg = Ug (1 − H l )
CPTC NOVEMBER 1994 38
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
and Vsl = U l H1
The liquid holdup is read from the "slip holdup" column. This calculation is made more
difficult by the poor formatting of the liquid holdup in the Pipephase output table. (The
liquid holdup is shown to only two decimal places in the table. For gas-condensate lines, if
the liquid holdup is below 0.5 percent, the printout will show 0.00 for the holdup.)
A more accurate way of calculating the superficial velocities from the Pipephase output
tables which doesn’t rely on reading the value for the liquid holdup is:
Hl =
(U g − Vm)
(U g − U l )
Vsl = U l H l
Vsg = Vm − Vsl
To calculate the C value in the API-RP14E equation, the value of the no-slip mixture
density must be known. Pipephase apparently only calculates and tabulates this value in
the output table if the Beggs and Brill (Moody) method is used. If other methods are used,
a value of 0.00 is given in the output table for the no-slip mixture density. The no-slip
mixture density can be calculated, however, from the phase densities shown on the output
table and the superficial velocities calculated above:
ρns =
(ρg Vsg ) + (ρl Vsl )
Vm
Pipephase allows the user to print a flow regime map based on either the Taitel-Dukler
map for near horizontal flow or the Taitel-Dukler-Barnea map for near vertical flow. The
flow regime map is printed only for the last "device" in a "link". If the "link" contains
several pipes with different inclinations, the flow regime map for some of these sections
may be quite different from the map at the last "device". The only way to print the flow
regime map at specific points along the line is to make these points ends of Pipephase
"links".
CPTC NOVEMBER 1994 39
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
The "link" summary tables print the flow regime predictions for each pipeline segment.
The printout shows both the predictions of the multiphase flow design method (e.g. Beggs
and Brill) and the Taitel-Dukler method. If OLGAS is available, the flow regime
predictions of OLGAS can be compared directly with the Taitel-Dukler prediction, and the
user can feel confident that the predicted flow regime is valid if the two methods match. If
methods other than OLGAS are used, disregard their flow regime predictions and only
consider the Taitel-Dukler predictions as reasonable.
Once the flow regime is determined, the designer needs to decide if this flow regime is
acceptable. This decision is more difficult than it may appear. Ideally, the flow line should
not be in the slug flow regime. In practice, it may be very difficult to design a line to avoid
slug flow under all anticipated flow conditions. The only variables the designer can change
are diameter and operating pressure; the changes in these variables required to avoid slug
flow may be impractical. It should be pointed out that many pipelines operate successfully
in slug flow. As long as the pipeline and downstream equipment are designed with proper
consideration of slug flow effects, they can be successfully operated.
The flow regime analysis may show that the line is in stratified flow. In many instances,
this is an excellent flow regime in which to operate. At low flowrates, however, slugging
may occur in lines predicted to be in stratified flow, induced by the terrain. Terrain
induced slugs are generally much longer than the slugs in normal slug flow and can cause
severe operating problems. Terrain slugging is discussed in more detail in Section 5.2.2.
If the pressure drop and velocities for lines in dispersed bubble or annular flow are within
acceptable limits, these flow regimes are usually good regimes in which to operate.
The pressure drop in the line should be compared with the allowable pressure drop. The
pressure drop in the line can be read from the Pipephase "link summary" table. It should be
pointed out that pressure drop is not always a maximum at the highest flowrate. If the
pipeline contains inclined or vertical elements, it is possible that the highest pressure drop
may occur at a low flow condition due to high elevational losses at low flows.
It is worthwhile to emphasize the point that the pipeline design should be checked at off-
design points as well as the nominal design point. For most pipelines, worst case
conditions for liquid holdup and flow regime occur at turn-down conditions.
CPTC NOVEMBER 1994 40
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
3.3 Section Highlights
Points to remember from Section 3.0 -
• Compositional models should be used for any gas-condensate or volatile oil system.
This recommendation covers gas-oil ratios above 3500 SCF/bbl.
• General practice with Pipephase: use the black oil model for lower gas-oil ratio
streams.
• If it is likely an emulsion will form, the Woeflin method (available in Pipephase)
should be used to estimate the viscosity of the emulsion.
• The pipeline profile must be realistic if the calculations of liquid holdup and
pressure drop to be accurate.
• Low velocities cause severe problems in prediction of the pipeline performance.
• If OLGAS becomes available, it is the recommended method for prediction of
pressure drop, liquid holdup, and flow regime.
• Mechanistic models extrapolate to field conditions much better than correlations,
since the mechanistic models account for the effects of all the major variables.
• The following methods can be used in Pipephase as a check of OLGAS or as the
design method if OLGAS is not available:
1. Pressure Drop
a) Near Horizontal Low Gas-Oil Ratio - Beggs and Brill (Moody) is good.
b) Near Horizontal Gas/Condensate - Eaton-Oliemans is good for relatively
high velocities. All of the models are poor for low velocities.
c) Near Vertical Gas/Condensate - Both Gray and Hagedorn-Brown are
good.
d) Near Vertical Gas/Oil - Hagedorn and Brown is good.
e) Inclined Up - Nothing is good; Beggs and Brill (Moody) is fair.
f) Inclined Down and Vertical Down - Everything is poor. Use Beggs and
Brill (Moody), but answers may be suspect at times.
CPTC NOVEMBER 1994 41
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
Liquid Holdup
g) Near Horizontal Low Gas-Oil Ratio - Beggs and Brill (Moody) is O.K.
h) Near Horizontal Gas/Condensate Lines - Nothing is accurate. The Eaton
holdup correlation is poor, but better than the other methods.
i) Near Vertical Gas/Condensate - The most accurate method is no-slip.
j) Near Vertical Gas/Oil - Hagedorn and Brown is pretty good.
k) Inclined Up - Beggs and Brill (Moody) issuables for low GOR lines,
nothing is accurate for gas/condensate. If gas velocities are high, use no-
slip; otherwise use Beggs and Brill (Moody). Be careful because the
holdups can be a factor of 10 in error in some cases.
l) Inclined Down and Vertical Down - Everything is poor. Use Beggs and
Brill (Moody), but answers may be suspect.
Flow Regimes
a) The Taitel-Dukler flow regime map is as good as OLGAS for near
horizontal flow with the exception of the slug-dispersed bubble boundary.
This boundary is very poorly predicted. If this method is used, it is
recommended that a value of ~10 ft/sec be used as the superficial liquid
velocity for the slug-dispersed bubble transition rather than the Taitel-
Dukler prediction.
b) The Taitel-Dukler-Barnea map for near vertical flow is also as accurate
as OLGAS.
• The flow line should, ideally, not be in the slug flow regime. In practice, it may be
very difficult to design a line to avoid slug flow under all anticipated flow conditions.
• At low flow rates slugging may occur in lines predicted to be in stratified flow,
induced by the terrain.
• If the pressure drop and velocity for lines in dispersed bubble or annular flow are
within acceptable limits, these flow regimes are usually good regimes in which to
operate.
CPTC NOVEMBER 1994 42
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
SECTION 4.0 - TRANSIENT FLOW MODELING
4.1 Transient Flow Modeling (General)
Transient multiphase flow simulators have only been developed recently. The first widely
used commercial program, OLGA, began development in about 1983 and has been
commercially available since 1990. OLGA’s only current competitor, PLAC, was
introduced to the market at about the same time. Chevron currently does not own either
program but has used OLGA for specific projects through consultants. Chevron internally
developed a transient code, Transpire, in the same time frame as OLGA. This program
has not been widely used, and it does not have as many features as the commercial codes.
Steady state simulators assume that all flowrates, pressures, temperatures, etc. are
constant through time. Inherently transient phenomena, such as slug flow, are modeled by
use of their average holdups and pressure drops. Transient models allow all the input
variables to change with time. Transient programs can model phenomena such as slug
flow and can show the variations in parameters such as outlet gas and liquid flowrates as a
function of time. Transient simulators, therefore, model the actual operation of pipelines
closer and with more detail than steady state simulators.
Transient simulators solve a set of equations for conservation of mass, momentum and
energy to calculate the liquid and gas flowrates, pressures, temperatures and liquid
holdups. These calculations are done at each time step. The programs utilize an iterative
procedure, which ensures that a set of boundary conditions (such as inlet flowrates and
outlet pressures as a function of time) are met while solving the conservation equations.
Steady state modeling can be used to size pipelines, but the predicted size may be
inaccurate if the line is in slug flow. Transient simulators can size pipelines more
accurately, and they are valuable in several other areas such as the design of downstream
facilities, development of operating guidelines, and the diagnosis of operating problems.
Steady state simulators cannot properly address any of these other concerns.
4.2 Use of Transient Simulators
Because of their power, transient simulators have been used for a variety of purposes.
These uses include:
a) Slug flow modeling
CPTC NOVEMBER 1994 43
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
b) Estimates of the potential for terrain slugging
c) Pigging simulation
d) Estimation of corrosion potential in low spots in the line
e) Startup, shutdown and pipeline depressuring simulations
f) Development of operating guidelines
g) Real time modeling, including leak detection
h) Operator training
i) Design of control systems for downstream equipment
j) Slug catcher design
A general guideline for the use of steady state and transient modeling would be to use
steady state modeling during the feasibility level design of a system but use transient
modeling in the final design of the pipeline and its associated equipment.
As transient simulators improve and computer power increases, it is likely that transient
simulators will eventually supplant steady state simulators.
Because Chevron does not own a transient simulator at this time, this guide does not
contain any guidelines for their use. Section 5.1 discusses the use of the OLGA program
for slug length prediction.
4.3 Section Highlights
Points to remember from Section 4.0 -
• Transient simulators model the actual operation of pipelines much closer than steady
state simulators.
• General guideline for the use of steady state and transient modeling: use steady state
modeling during the feasibility level design of a system, but use transient modeling in
the final design of the pipeline and its associated equipment.
CPTC NOVEMBER 1994 44
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
SECTION 5.0 - SLUG FLOW ANALYSIS
5.1 Slug Flow - General
The formation of slugs of liquid can be caused by a variety of mechanisms:
a) Hydrodynamic Slugging
b) Terrain Slugging
c) Pigging
d) Startup and Blowdown
e) Flowrate Changes
Each of the mechanisms will be briefly discussed here, and will be further discussed in
Section 5.2.
Hydrodynamic slugging refers to operating in the slug flow regime. In near horizontal
flow, slugs are formed by waves growing on the liquid surface to a height sufficient to
completely fill the pipe. When this happens, alternating slugs of liquid and bubbles of gas
flow through the pipe, as illustrated in Figure I:1-1.
Terrain slugging occurs when a low point in the line fills with liquid. The liquid does not
move until gas pressure behind the blockage builds high enough to push the liquid out of
the low spot as a slug. Terrain slugging can produce very long slugs in pipeline-riser
systems. Although terrain slugging occurs at low superficial gas and liquid velocities, the
actual velocities during slug release can be very high.
When a pipeline is pigged, most of the liquid inventory is pushed from the line as a liquid
slug ahead of the pig.
When a line is shut down, liquid that is left in the line will drain to the low points in the
line. When the flow is restarted, the accumulated liquid may exit the pipeline as a slug.
CPTC NOVEMBER 1994 45
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
When the flowrate is increased, the liquid holdup in the line decreases. This change in
holdup can either exit the line as a gradual increase in liquid flow, or it can come out in
the form of a slug, depending on the flowrate.
Each of the slug flow mechanisms is highly transient in nature. Steady state models cannot
properly simulate slug flow behavior and are very limited in their ability to predict slug
characteristics such as slug length and frequency. The next two sections of the guide
discuss the slug flow mechanisms in more detail, discuss available methods of predicting
slug flow behavior and give some recommendations on sizing of slug catchers and
separators.
5.2 Slug Length and Frequency Predictions
Although estimates of slug length and frequency are of prime importance in design of
pipeline system facilities, most of the prediction methods available are poor. Development
of prediction methods has been hampered by the difficulty of the problem and the meager
amount of available test data. This section discusses each of the mechanisms for slug flow,
discusses the available test data, and give recommendations on the best available
prediction methods.
5.2.1 Hydrodynamic Slugging
Experimental measurements of the slug length in hydrodynamic slug flow show several
interesting results:
a) The slug length is not constant. At a given point in the line, the slug length varies
greatly around an average value. Different investigators have characterized the slug
length distribution as log normal, truncated Gaussian, inverse Gaussian, or fractal
distributions. The maximum slug length may be several times greater than the
average.
b) The average slug length and the slug length distribution change with the position
down the pipe. Slugs may grow, dissipate, or merge as the flow continues down the
pipe. As a result, the average slug length usually increases with the position in the
pipe, while the standard deviation of the slug length distribution decreases.
CPTC NOVEMBER 1994 46
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
c) Slugs in vertical pipes are much smaller than slugs in horizontal pipes.
d) The slug length in laboratory experiments can be fairly well correlated. These tests
show that the average slug length (in feet) is approximately 32 times the Pipe
Diameter (in feet) for horizontal pipes.
e) In the data base of published pipeline field test results, the average slug length is
much higher than the results observed in the laboratory. The field tests results show
average slug lengths of 300-2000 times the Pipe Diameter, with some slugs as long
as 10,000 times the Pipe Diameter.
The differences between laboratory and field data shown in points d) and e) above are due
to factors such as:
- terrain features have a large effect on the slug length and frequency;
- slug flow in the field can be combination of mechanisms such as hydrodynamic
slugging causing terrain slugging;
- field pipelines are much longer, allowing more time for slug growth.
Average slug length is a complex function of many variables: the diameter and length of
the pipeline; the topography of the line; the gas and liquid superficial velocities; the liquid
physical properties; and the gas density.
Several correlations have been presented for the prediction of slug length and slug
frequency for horizontal piping and pipelines. Most of these correlations are based solely
on laboratory data, which means they are of limited use in the design of pipelines in the
field.
A few correlation methods have been presented based on field data. Two of these
methods, the Brill, et al. Correlation and the Hill & Wood method, have been widely used
for slug length prediction. Both methods will be discussed in detail.
Brill, et al. took several sets of data on 12 and 16 inch pipelines at Prudhoe Bay in about
1978. They were the first experimentalists to report the wide disparity between the
extrapolation of lab results and field data. They developed a simple correlation for slug
CPTC NOVEMBER 1994 47
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
length based on the Prudhoe Bay tests and small diameter laboratory data. Their
correlation is:
ln(Ls) = -2.663 + 5.44 (ln(D))0.5 + 0.059 ln(Vm)
where Ls = Average slug length, ft.
D = Pipeline inside diameter, inches
Vm = Mixture velocity, ft/sec
The Prudhoe Bay test data appeared to be a log normal distribution around the mean slug
length. Log normal distributions were fit to each of the Prudhoe Bay tests, and the mean
slug length and variance were calculated. Their method assumes that the variance for any
pipeline is the same as the average value of the variance from these tests. With this
assumption, the slug length distribution is the same for all pipelines. The distribution is:
Percent Probability Slug Length/Mean Slug Length
50.0000 1.00
84.1300 1.65
97.7200 2.72
99.8600 4.46
99.9900 6.42
99.9999 10.76
The Brill method is easy to use, and it has been used as the design basis for many
facilities. The Brill et al. model is the basis for the slug length predictions in Pipephase.
Unfortunately, the Brill method is very inaccurate. It gives poor predictions for almost
every data set that was not included in the original correlation. A comparison of the Brill
predictions against measured average slug lengths from a 16" laboratory line and two
field pipelines shows:
CPTC NOVEMBER 1994 48
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
Actual Predicted
Data Source Avg. Slug Length, ft. Avg. Slug Length, ft.
BHRG 30 700
Field Data 1000 120
Field Data 400 1800
The inaccuracy of the Brill et al. method is due to the simplicity of their formula. The
slug length is predicted to be almost exclusively a function of the line diameter. As noted
previously, the slug length is a complex function of many variables, and a simple formula
like this cannot approximate reality.
There are two other methods based primarily on the Prudhoe Bay data, namely, the
Norris correlation and the Scott, et al. correlation. Their performance, while a bit better
than the Brill method for larger pipelines, is also weak. Both of these methods assume
that the slug length is only dependent on the line diameter.
In 1990, Hill and Wood of BP published a paper proposing an alternate way of modeling
slug frequency. Their work was based on both laboratory data and a large number of field
measurements. The model is more sophisticated than the Brill approach and attempts to
account for the many of the major variables. Their model correlates the slug frequency
with the diameter, gas-liquid slip velocity, and the equilibrium holdup at the beginning of
the pipeline. The model assumes a horizontal pipe and uses the Taitel-Dukler stratified
flow model to estimate the slip velocity and the equilibrium holdup at the beginning of the
pipeline. In order to calculate the Taitel-Dukler holdup, the value for the Lockhart &
Martinelli X factor is calculated from the following equation:
0.9 0.4 0.1
V ρ1 µ1
X = sl
ρ
µ
Vsg g g
where: µ 1 = Liquid Viscosity, cp
µ g = Gas Viscosity, cp
CPTC NOVEMBER 1994 49
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
Once X is known, the value for the liquid holdup (Hle) for stratified flow can be read from
Figure I:5-1. The actual gas and liquid velocities can be calculated from the superficial
velocities and the stratified flow liquid holdup by the formulas:
Vsg
Ug =
1 − H le
Vsl
and Ul =
H le
Their equation for slug frequency is:
Fs =
(
2.74 H le U g − U l )
D(1 − H le )
where Fs = Slug Frequency, slugs/hour
D = Pipe Inside Diameter, ft
Ug = Actual Gas Velocity, ft/sec
Ul = Actual Liquid Velocity, ft/sec
Hle = Liquid Holdup (based on stratified flow at the inlet of the pipe)
To calculate the slug length, the slug fraction, which is defined as the slug length divided
by the sum of the slug and bubble lengths, must be known. The slug fraction can be
calculated rigorously by use of mechanistic slug flow models, such as the Hubbard-Dukler
model or the Nicholson, Gregory, and Aziz model. A simplified alternative to the use of
these models is the following procedure.
First, the liquid holdup in the slug will be estimated. The Gregory, Nicholson, and Aziz
method is the easiest method to use, and it is as accurate as most of the methods. The
liquid holdup in the slug is given by:
CPTC NOVEMBER 1994 50
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
1
H ls = 1.39
V
1+ m
28.4
where Hls = Liquid Holdup in the slug
The liquid holdup in the bubble (Hlb) can be assumed to be ~0.20 for much of the slug
flow range. From a material balance, the slug fraction (SF) can be calculated from these
values and the overall liquid holdup prediction:
Hl − H lb
SF =
Hls − H lb
The slug length can be calculated from:
3600SF (Vm )
Ls =
Fs
where Ls = Mean Slug Length, ft
An example of the use of the Hill & Wood model is shown in Section 6.1.
To use the Hill & Wood model for slug catcher designs, the design slug length is needed
instead of the mean slug length. A rule of thumb, based on the limited amount of
experimental data available, is that the maximum slug length is approximately 6 times the
mean slug length.
The Hill & Wood model is more sophisticated than the Brill model and is based on a
broader data base. If a correlation based model is used for slug length prediction, the Hill
& Wood model is probably the best available method.
Another alternative approach to hydrodynamic slug length prediction is the method used
in the OLGA transient program. The slug tracking model in OLGA attempts to
dynamically track each slug in the system, from its inception to its dissipation or exit from
the pipeline. This method models the growth or dissipation of each slug and models
phenomena such as the merger of two slugs. The model accounts for terrain effects and
CPTC NOVEMBER 1994 51
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
the effects of all of the major variables. This model, which has only been available to the
industry since early 1994, shows promise in prediction of slug lengths.
5.2.2 Terrain Slugging
Terrain slugging refers to slug flow resulting from a blockage of a low spot in the pipe
with liquid. When the liquid completely fills up a low spot, the liquid remains stationary
until gas pressure behind the slug builds to a suitably high level to push the liquid out as a
slug.
The most severe form of terrain slugging occurs in pipeline-riser systems, which have a
negatively sloping pipeline ahead of the riser. At low flowrates very large slugs may form
in this type of system. These slugs can be much larger than those associated with
hydrodynamic slugging. Figure I:5-2 illustrates the various stages in terrain slugging for
pipeline-riser systems.
Experimental work has shown that both hydrodynamic and terrain slugging may occur at
various points in the line, under certain conditions. This is one of the reasons that it is so
difficult to extrapolate laboratory slug length data to field conditions.
One of the problems with using a steady state program such as Pipephase is its inability to
identify terrain slugging. Pipelines in the terrain slugging regime will usually be identified
by the steady state simulator as being in stratified flow. If no further analysis is done, the
line may be designed in the belief that it is in a steady flow regime. On startup, the line
may experience slugs that may be thousands of feet long.
The best way to analyze the line for terrain slugging is to run a transient simulator. If
transient analysis is not possible, some simplified methods have been developed for
estimation of severe slug potential. These methods pertain only to the modeling of
pipeline-riser slugging. The method of Pots et al. Has been included in Pipephase, and it is
discussed here.
By equating pressure buildup rates, Pots developed a formula for a dimensionless severe
slugging factor πss:
CPTC NOVEMBER 1994 52
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
zRT Wg gc 144
π ss =
M Wl g L f (1 − H l )
where z = Gas compressibility
R = Gas Constant, 10.73 psia-ft3/(lb-mole-deg R)
T = Temperature, deg R
M = Gas Molecular Weight, lb/lb-mole
Wg = Gas mass flowrate, lb/sec
Wl = Liquid mass flowrate, lb/sec
gc = Conversion factor, 32.2 lb-ft/lbf-sec2)
g = Acceleration due to gravity, 32.2 ft/sec2
Lf = Length of the pipeline, ft
Hl = Liquid holdup in the pipeline
When the value for πss is less than 1, severe slugging could occur. Values less than 1 do
not ensure that severe slugging will occur. Pots indicates that the flowline must be in
stratified flow for severe slugging to take place. The Taitel-Dukler flow regime map can
be used to determine whether the flowline is in stratified flow at the pipeline-riser junction.
Pots also gives an expression for the slug length in severe slugging:
Ls = Lr / πss
where Ls = Slug length, ft
Lr = Riser height, ft
Pipephase calculates πss if the SLUG table option is turned on.
The equation for πss indicates that long pipelines, low pressure, and low gas-oil ratios
contribute to the likelihood and severity of terrain slugging.
CPTC NOVEMBER 1994 53
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
The Pots method gives a reasonable approximation to terrain slugging behavior for a
simple constant slope pipeline-riser system, but it cannot rigorously model the
performance of a hilly terrain pipeline connected to a riser.
5.2.3 Pigging Slugs
Pigs are run through pipelines for a variety of reasons, including:
a) Liquid inventory control
b) Maintenance and data logging
c) Pipeline cleaning and dewaxing
d) Inhibitor application
The classic analysis of pigging was developed by Baker and McDonald in 1959. They
identified five zones in a pipeline undergoing pigging:
a) Undisturbed equilibrium flow
b) Liquid slug ahead of the pig
c) Pig itself
d) Dry gas region behind the pig
e) Reestablished equilibrium flow
Figure I:5-3 graphically illustrates the zones in a pigged pipeline.
Baker and McDonald developed a quasi-transient model of pigging in which the lengths
and pressure drops for the various zones were estimated and tracked with time. Although
some of the methods used in the Baker-McDonald model are antiquated, the model is
conceptually a very good representation of pigging.
Several investigators have modified the Baker-McDonald model to improve its
predictions. The model developed by Barua of Tulsa University has been included in
Pipephase.
CPTC NOVEMBER 1994 54
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
The commercial transient simulators model the physics of pigging more rigorously than
the models of Baker & McDonald or Barua, and are more accurate. The simpler models,
however, give pretty good predictions. It is also possible to get a good estimate of the pig
volume and transit time by simple hand calculations.
To estimate the slug volume and transit time by hand, the designer can use the following
method. The pig and the slug in front of it move at a velocity that is equal to the gas
velocity behind the pig. For a first approximation, this velocity can be assumed to be
equal to the mixture velocity. The transit time of the pig would therefore be:
ttrans = Lf / Vm avg
where ttrans = Transit time for the pig, sec
Lf = Pipeline length, ft
Vm avg = Average mixture velocity, ft/sec
When the slug exits the line, the volume of liquid ahead of the pig is equal to the liquid
holdup in the line minus the amount of leakage past the pig minus the amount of liquid
produced while the pig is traversing the pipeline or:
Qslug = (Hl Ap Lf) (1 - fleak) - Vsl Ap ttrans
where Qslug = Volume of liquid ahead of the pig, ft3
Hl = Average liquid holdup in the pipe
Ap = Cross-sectional area of the pipe, ft2
fleak = Fraction of the liquid that leaks past the pig
The value for fleak is dependent on the type of pig and the pig velocity. In lieu of better
data, use fleak = 0.02.
The amount of time during which the liquid slug enters the slug catcher is:
CPTC NOVEMBER 1994 55
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
Qslug
t slug =
A p Vm avg
where tslug = Time during which the slug enters the slug catcher, sec
The liquid rate while the slug enters the slug catcher is:
qslug = Vm avg Ap
where qslug = Liquid rate into slug catcher when slug is exiting, ft3/sec
The simplified analysis shown above doesn’t account for many effects that occur during
pigging, such as pig acceleration and deceleration, aeration of the liquid slug, etc., but it
gives a ball-park estimate of the flows and volumes needed for the slug catcher design.
5.2.4 Startup and Blowdown Slugs
When a pipeline is shut down, the liquid will drain to the low points in the line. When the
line is restarted, this liquid may exit the line in the form of slugs. To determine whether
slugging will occur, and to estimate the magnitude of the slugs, a transient simulator must
be used.
If the pipeline is depressured at shutdown, slugs may also form, due to high gas velocities
during the blowdown period. Transient simulation is needed to model these slugs.
5.2.5 Rate Change Slugs
When the flowrate is increased, the liquid holdup in the line decreases. This change in
holdup can either exit the line as a steady flow with increased liquid production, or it can
come out in the form of a slug, depending on the flowrate change.
Please note that the rate change slugs can occur in gas/condensate lines when the rates are
increased. The line may be in a steady flow pattern, such as stratified flow, at both the
initial and final flowrates but will slug during the transition period until the line re-
equilibrates at the higher rate.
CPTC NOVEMBER 1994 56
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
As with startup slugs, it is impossible to predict whether slugs will occur when rates are
changed using steady state or hand methods. The line must be dynamically simulated
using a transient flow program.
5.2.6 Downstream Equipment Design for Slug Flow
The design of slug-catchers, separators, and control systems downstream of pipelines must
comprehend the presence and severity of slug flow. Estimates of parameters such as slug
volumes, liquid and gas rates exiting the pipeline as a function of time, etc. must be
factored into the design of this equipment. These variables should be calculated for the
design operation and for a series of off-design cases: turndown rates, pigging, shutdown
and startup, rate changes, etc.
As mentioned, transient modeling gives the best estimates of slug flow behavior. Some of
the transient simulators also allow the user to simulate separators and control systems as
part of the run, allowing the user to fine tune the design.
For approximate sizing of the equipment, the methods shown in Sections 5.2.1 to 5.2.3
can be used. Off-design cases should be estimated as well as the design point. In general,
the size of slug catching equipment for gas-condensate pipelines will be governed by
pigging considerations. For oil dominated systems, the size of the slug catcher is usually
governed by the maximum slug length due to either hydrodynamic or terrain slugs.
Because slug catching equipment can be a substantial cost item, it is possible to minimize
the cost of the equipment by considering alternative operating scenarios. Some of these
include:
a) Does the line need to be pigged routinely or is pigging only needed for maintenance?
If pigging is a maintenance item done once per year, it is possible to run the pig at a
rate low enough to keep a small slug catcher from overflowing. It is also possible to
send the liquid from the slug catcher to low pressure separation at high rates for
short periods, if the occurrence of pigging is infrequent. This, too, minimizes the
high pressure slug catcher sizing.
CPTC NOVEMBER 1994 57
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
b) Pigging of the line after steady state conditions are reached may result in a very large
slug catcher. If a high pigging frequency is chosen, so that the line never achieves
steady state operation, the slug catcher size can be minimized.
c) It is possible to design the line for frequent pigging at low rates and steady state
operation at higher rates, thereby minimizing slug catcher size while eliminating the
need for frequent pigging when the rate is high.
d) If pigging isn’t necessary for a gas-condensate line, the sizing of the slug catcher
usually becomes dependent on rate changes. Limiting the turndown on the line and
limiting the amount that the rate is changed at one time can be beneficial in
minimizing slug catcher sizes.
e) The use of parallel pipelines should be considered as a way of limiting the turndown
for a line. When rates are low, all the production can be fed to one of the lines,
thereby keeping velocities high, minimizing liquid holdup.
f) If terrain slugging is shown to be a problem, there are several remedial steps which
have been employed to decrease the severity of the slugging or eliminate it
completely. One approach would be to reroute the pipeline to reduce or eliminate
dips in the pipeline profile. Two other methods are: choking of the flow at the tope
of the riser; and gas lifting the riser.
g) Because the slug length for hydrodynamic slug flow is a function of the diameter of
the line, the use of parallel pipelines instead of one pipeline can decrease the slug
length and volume going to the slug catcher/separator.
h) The use of multiphase pumps or subsea separators at well clusters can decrease slug
catcher sizes significantly.
i) Pigs have been developed with a variety of proprietary internals that limit the
velocity at which the pig moves through the pipeline. It may be possible to limit the
slug catcher size by restricting the pig velocity, which, in turn, limits the rate of
liquid exiting the line during the pigging operation.
CPTC NOVEMBER 1994 58
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
5.3 Section Highlights
Points to remember from Section 5.0 -
• The formation of slugs of liquid can be caused by a variety of mechanisms:
1. Hydrodynamic Slugging
2. Terrain Slugging
3. Pigging
4. Startup
5. Rate Changes
• The Brill method is very inaccurate. It gives poor predictions for almost every data set
that was not included in the original correlation.
• Rule of thumb (based on limited amount of data available): the maximum slug length is
approximately 6 times the mean slug.
• If a correlation based model is used for slug length prediction, the Hill & Wood model
is probably the best available method.
• Pipelines, which are in the terrain slugging regime, will usually be identified by the
steady state simulator as being in stratified flow. If no further analysis is done, the line
may be designed in the belief that it is in a steady flow regime. On startup, the line
may experience slugs that may be thousands of feet long..
• In general, the size of slugcatching equipment for gas-condensate pipelines will be
governed by pigging considerations. For oil dominated systems, the size of the
slugcatcher is usually governed by maximum slug length due to either hydrodynamic
or terrain slugs.
• There are alternative operating scenarios which can be considered to minimize slug
catcher size.
CPTC NOVEMBER 1994 59
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
Figure I: 5-1 Taital-Dukler Liquid Holdup Predictions for
Simplified Flow in a Horizontal Pipeline
CPTC NOVEMBER 1994 60
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
Figure I: 5-2 Stages in Terrain Slugging of Pipeline Riser Systems
CPTC NOVEMBER 1994 61
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
Figure I: 5-3 Pipeline Pigging
CPTC NOVEMBER 1994 62
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
SECTION 6.0 - EXAMPLE PROBLEMS
6.1 EXAMPLE1: Low Gas/Oil Line Between Platforms
This example is based on the Mejo to Tapa P/P line in Nigeria. The line runs 8 miles from
a Wellhead Platform to a Producing Platform. The gas-oil ratio for the production is about
345 SCF/bbl oil. Water production is initially zero, but builds rapidly with time. The
production profile is:
Year No. Oil Production, Water Production, Gas Production,
bbl/day bbl/day MMSCFD
1 15,478 0 5.32
4 7,954 8,865 2.74
8 2,057 7,584 0.70
12 765 4,438 0.26
The API gravity of the stock tank oil is 27.0. The specific gravity of the separator gas is
about 0.71. The dry wellstream composition, as measured by a separator test, is:
Component Mole %
CO2 0.90
N2 0.05
C1 31.94
C2 4.18
C3 1.55
iC4 0.45
nC4 0.49
iC5 0.48
nC5 0.37
C6’s 1.66
C7’s 2.04
C8’s 4.23
C9’s 3.55
C10’s 3.45
CPTC NOVEMBER 1994 63
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
C11’s 3.07
C12's 2.57
Cl3’s 2.64
Cl4’s 2.22
C15's 2.06
C16's 1.82
Cl7's 1.48
C18's 1.41
Cl9's 1.09
C20+ 26.30
Total 100.00
The specific gravity of the C20+ fraction is 0.9499 at 60 degrees F. and the molecular
weight of the C20+ is 309.
The hydrocarbon wellstream composition is assumed to remain constant throughout the
life of the field.
The pipeline system consists of a downward riser at the wellhead platform, the 8 mile long
pipeline, and an upward riser at the production platform. The down riser is vertical and it
is 65 feet long. The up riser is vertical and 100 feet long. The pipeline elevation profile is
not known. The only information available on the pipeline elevation is that the water depth
at the wellhead platform is 15 feet, and the water depth at the production platform is 20
feet.
The pressure at the production platform is 80 psig. The maximum pressure at the wellhead
platform is 300 psig.
The line will be unburied, and it will not be coated with concrete. The wellstream
temperature at the wellhead platform is 130 degrees F, and the ambient air and water
temperatures are 80 degrees F.
What line size is required? Is slugging likely to be a problem? If slugging occurs, what
length and frequency are the slugs?
CPTC NOVEMBER 1994 64
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
Solution
The operation of the line will be initially simulated by Pipephase. If it appears that slugging
is likely, additional simulations will be done using the OLGA transient model.
6.1.1 Line Size
In order to run Pipephase, an estimate of the line diameter is needed. The minimum line
size is given by the erosional velocity formula,
C
Vmax =
ρ ns
where C = 100
To calculate ρns and Vmax rigorously, the phase equilibria and physical properties would
need to be found by flash calculations. Since the minimum diameter is only a starting place
for the pipe sizing calculations, it isn’t necessary to calculate these values with great
precision. When the Pipephase results are analyzed, the values of the erosional velocity
constant will be computed and compared against the maximum value of 100.
The maximum value of C should occur at the outlet of the up riser, since the mixture
velocity is the highest there. The pressure at the top of the riser should be almost equal to
the separator pressure, 80 psig. The temperature of the fluid at the top of the riser should
be close to sea temperature, 80 degrees F. At these conditions, almost all the gas should
be flashed out of solution, so that the amount of gas present should be equal to the gas/oil
ratio times the oil production rate. The compressibility factor of the gas at these conditions
would be about 0.98. Therefore the amount of gas and liquid present under the year 1
conditions should be approximately:
Gas ft3/sec:
cfsg = (345 SCF/bbl) (15478 bbL/D) (14.7 psia/94.7 psia) [(460+80) F/(460+60)
F] (1 D/86,400 sec) .98 = 9.76 ft3/sec
Liquid ft3/sec:
CPTC NOVEMBER 1994 65
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
cfsl = (15478 bbl/D) (1 D/86,400 sec) (42 gal/bbl) (1 ft 3/7.48 gal) = 1.01 ft3/sec
The densities of each phase are approximately:
Gas:
ρg = (.71) (28.97 lb/mole) (95 psia) / [(.98) (10.73 psia-ft3/mole-degF) (460+80
degF)] = 0.344 lb/ft3
Liquid:
ρl = (62.4 lb/ft3) [141.5/(131.5+27 deg API)] = 55.7 lb/ft3
The no-slip average density of the mixture, ρns, is given by:
ρns =
(ρg cfsg ) + (ρl cfsl )
(cfsg + cfsl )
= [(0.344 * 9.76) + (55.7 *1.01)] / (9.76 + 1.01) = 5.54 lb/ft 3
The erosion velocity criteria gives a maximum velocity of:
Vmax = 100 / (5.54)0.5 = 42.5 ft/sec
The minimum diameter of the line, therefore, is:
Dmin = [( 4 * (9.76 + 1.01) ft3/sec) / (42.5 ft/sec) * 3.1416)]0.5 (12 in/ft)
= 6.82 inches
Rounding this result to the nearest standard line size indicates that the pipeline must be at
least an 8 inch line to meet the erosional velocity criterion.
Pipephase runs should be made for the production rates at the various years starting with a
line size of 8 inches. If the pressure drop becomes excessive, increase the line size, until
CPTC NOVEMBER 1994 66
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
the inlet pressure for the limiting case remains below about 300 psig for all production
rates.
The approach discussed in the previous paragraph requires a trial and error solution for
the diameter. To cut down the number of trial diameters, it is possible to approximate the
frictional pressure drop by use of a "ball-park" method. The friction loss can be estimated
by assuming a homogenous mixture of the two phases. The assumption of homogenous
flow gives a friction loss that is low, typically being anywhere from 5% to 100% too low.
Adding 25% to the homogenous friction loss will bring the answer into a reasonable
range.
For this example, the elevational and accelerational pressure drops will be much less than
the frictional loss, and will be ignored in the rough line sizing calculations.
Using typical values for the viscosities of each phase (Gas Visc. = 0.015 cp, Liq. Visc. =
10 cp) gives a no-slip viscosity of:
[(0.015 x 9.76) + (10 x 1.01)] /(9.76 + 1.01) = 0.95 cp
The homogenous frictional pressure gradient is:
dp 4 f nsV m ρns
2
=
dx 2 g c (12d )
d
1488 ρnsVm
12
Rens =
µns
(9.76 + 1.01) ft 3 / sec x 4 x 144
Vm =
3.1416 d 2
where d is in inches
Vm = 1975 / d2 (ft/sec)
ρns = 5.54 lb/ft3
CPTC NOVEMBER 1994 67
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
µns = 0.95 cp
Substituting these values into the expression for Rens gives:
Rens = 1,426,000/d
For a smooth pipe, the Fanning friction factor can be approximated by:
fns = 0.046 / Rens0.2
Substituting,
fns = 0.046/(1426000/d)0.2 = .00270 d0.2
Combining this expression with the expressions above gives the following expression for
the homogenous frictional pressure gradient:
dp
( )
1975
4 0.00270d 0.2 2
d
(5.54)
=
dx (64.4)(12d)
= 302.0/d4.8 psi/ft
The allowable pressure drop is 300-80=220 psi in the 8 mile long pipeline. Equating this
pressure drop to the homogenous pressure gradient, and adding 25% to the homogenous
pressure gradient to account for the two-phase behavior gives:
220 psi/(8 * 5280 ft) = 1.25 * 302.0/d4 8 psi/ft
d = 10.29 inches
These calculations indicate that an 8 inch line is probably too small, and that a 10 inch line
is probably the minimum line size that can be used to stay within the desired pressure
drop.
CPTC NOVEMBER 1994 68
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
For the sake of this example, we will make Pipephase runs for 8, 10, and 12 inch pipelines
and risers.
Since we have both black oil properties and compositions available for this example, we
will run both the black oil model and the compositional model in Pipephase for the 10 inch
line as a comparison between the methods. In general, compositional modeling predicts
the phase equilibrium more accurately than black oil modeling, but the black oil models
may predict the physical properties of the liquid better than compositional modeling. For
low GOR systems, black oil modeling may give the best answers, while compositional
modeling is clearly superior for high GOR systems.
The black oil model only needs the gravities of each phase and the total gas-oil ratio of the
system.
For the compositional model, the program needs two of the following for each petroleum
cut: molecular weight; specific gravity; or normal boiling point. In the example
information, we are given the specific gravity and molecular weight for the C20 + cut, but
we have no information on the C6 to Cl9 cuts. Without this information, the only possible
characterization is to use the normal paraffin data for the cut. Use nCl0 as the basis for the
properties of the Cl0 cut, for instance. In reality, each of these cuts consists of hundreds of
different components boiling in the same boiling range as the normal paraffin, and the
phase behavior of this mixture of aromatics, naphthenes, and alkylated paraffins is not the
same as the behavior of the normal paraffin. The proper way to characterize the cuts is to
have laboratory analyses of the specific gravity and molecular weight of each of the cuts in
addition to their boiling ranges, but this information is rarely available.
Information is needed on the pipeline and risers. The diameters to be used in this exercise
are:
Nominal Diameter, inches Outside Diameter, inches Inside Diameter, inches
8 8.625 7.625
10 10.750 9.500
12 12.750 11.375
CPTC NOVEMBER 1994 69
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
Since there is insufficient data to do rigorous heat transfer calculations, use an overall heat
transfer coefficient, U, of 5 BTU/hr/ft2/degF for the pipeline and a U of 20 for each of the
risers.
The pipeline elevation profile has not been given. The simplest way to simulate the
pipeline profile is to assume that it has a constant slope, with a 5 foot drop in elevation
over its 8 mile length. This assumption will give the most optimistic results, because it will
minimize the elevational pressure drop for hills. To better mirror reality, some terrain
effects could be added by adding hills and valleys to the profile. For high velocities, there
will be negligible difference in the holdup and pressure drop between the constant slope
profile and the profile with the hills added. For low velocities, however, the difference can
be significant. For the sake of simplicity in this example, we will use the straight-line
profile for the Pipephase runs, with the understanding that the pressure drop and liquid
holdup for low rates may be low.
The Pipephase runs will be made with a constant outlet ("Sink") pressure of 80 psig. The
inlet ("Source") pressure to the line will vary with the production rate.
Since this line is a low gas-oil ratio line, the Beggs and Brill correlation will be used to
calculate the pressure drop and liquid holdup for the line. If the OLGAS method had been
available, it would have been used for the calculations. Because of its mechanistic model,
OLGAS would show more of an impact of hills than Beggs and Brill, and would give
more accurate answers. The Beggs and Brill flow regime calculations are poor, and they
will be ignored. The Taitel-Dukler-Barnea flow regime predictions will be used instead.
A comparison of the predictions of the black oil model with three different liquid viscosity
methods and the compositional model was made for the 10-inch line at year 1 rates. The
predicted inlet pressures and liquid viscosity for the models were:
CPTC NOVEMBER 1994 70
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
Model Inlet Pressure, psig Liquid Viscosity at
Pipeline Outlet, cp
Compositional 247 2
Black Oil, Glass Is. 301 18
Black Oil, Chew Vis. 320 29
Black Oil, Vazquez Vis. 335 62
There is a wide discrepancy between the model predictions, which can be explained by the
large differences in liquid viscosity. The viscosity of the reservoir fluid was measured
during the PVT analysis of the recombined wellstream. This viscosity indicated that the
Glaso correlation modeled the liquid viscosity best.
The poor viscosity prediction of the compositional model may be due in part to the
characterization of the heavy ends of the wellstream. Errors of this magnitude in physical
properties are disturbing, and merit further investigation.
It was decided to use the Black Oil model with the Glaso liquid viscosity correlation for all
the Pipephase runs for this example.
Pipephase runs were made for the three line sizes (8, 10, and 12 inch) for the 4 production
rates shown in the production forecast. The inlet pressures for the various cases were:
Year No. 8 inch 10 inch 12 inch
1 530 301 199
4 433 242 164
8 194 133 119
12 126 115 110
The 8-inch line is too small to handle the rates in the early years of production. The 10-
inch line is at the maximum inlet pressure for the Year 1 conditions. The 12-inch line is
comfortably within the maximum inlet pressure of the line.
The mixture velocities at the exit of the P/P riser for the various cases are:
CPTC NOVEMBER 1994 71
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
Year No. 8 inch 10 inch 12 inch
1 33.21 21.06 14.58
4 18.60 12.03 8.37
8 5.88 3.75 2.60
12 2.51 1.59 1.12
Pipephase does not print the superficial gas and liquid velocities. The values for these
parameters can be calculated from the program output by the following relationships:
Vsg = Ug (I-HI)
Vsl = Ul HI
where the Ug is the actual gas velocity, Ul is the actual liquid velocity, and HI is the slip
liquid holdup. These three parameters are tabulated in the "Link" device detail report.
The superficial gas velocity at the exit of the P/P riser are:
Year No. 8 inch 10 inch 12 inch
1 30.01 19.00 13.14
4 15.13 9.80 6.81
8 3.90 2.47 1.71
12 1.44 0.90 0.64
The superficial liquid velocity at the exit of the P/P riser are:
Year No. 8 inch 10 inch 12 inch
1 3.20 2.06 1.44
4 3.47 2.23 1.56
8 1.98 1.28 0.89
12 1.07 0.69 0.48
The value of the constant C in the erosional velocity formula can be calculated by either of
CPTC NOVEMBER 1994 72
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
the following equivalent relationships:
C = [Vm (ρl Vsl + pg Vsg)]0.5
= ρns0.5 Vm
The values of the liquid, gas, and no-slip densities can be read from the, "Property"
summary table in the Pipephase output. Substituting these values into the above equation
gives the following values for C at the exit of the P/P riser:
Year No. 8 inch 10 inch 12 inch
1 78.9 50.4 35.0
4 62.4 40.3 28.1
8 26.8 17.2 11.9
12 12.9 8.2 5.8
The values for C are within the API guidelines for all cases.
The Taitel-Dukler-Barnea flow regimes at the end of the pipeline for the various cases are:
Year No. 8 inch 10 inch 12 inch
1 Slug Slug Slug
4 Slug Slug Slug
8 Slug Slug Strat
12 Slug Strat Strat
The predicted liquid holdups (in barrels), using the Beggs and Brill correlation, are:
Year No. 8 inch 10 inch 12 inch
1 1064 1336 1664
4 1268 1683 2197
8 1367 2018 3607
12 1563 3093 5009
CPTC NOVEMBER 1994 73
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
The conclusions regarding the line sizing are that the 10-inch line is the appropriate line
size. The pressure drop for the 10-inch during year 1 is right at the upper limit for inlet
pressure, so the production rate could be less than design if the Pipephase predictions are
optimistic. The 8-inch line is definitely undersized, and the 12-inch appears oversized. The
velocities in the later years of operation are a definite concern for all three-line sizes. Due
to these low velocities, severe slugging is a concern during the later years.
We need to quantify the occurrence and severity of slug flow. The Pipephase results
indicate that the pipeline will operate in the hydrodynamic slug flow regime for all rates
with the 8 inch line, years 1 to 8 for the 10 inch line, and years 1 to 4 for the 12 inch line.
Year 8 for the 12-inch and year 12 for both the 10 and 12 inch lines are shown to be in
stratified flow in the pipeline. This result is deceptive, since stratified flow in a
downwardly sloping pipeline connected to a vertical riser is the classical severe slugging
scenario. The key to estimating whether severe slugging will occur is to determine
whether the Pots πss factor is less than 1. Pipephase tabulates this value as part of its
"SLUG" report. The values for the various cases are:
Year No. 8 inch 10 inch 12 inch
1 0.098 0.084 0.078
4 0.052 0.044 0.041
8 0.024 0.023 0.032
12 0.020 0.042 0.121
All the values of πss are much less than 1, indicating that severe slugging is possible for this
pipeline. By Pots’ analysis, only those points, which are in stratified flow in the pipeline,
will be in the severe slugging regime.
Therefore, the predicted flow regimes for the system using the Pipephase results are:
Year No. 8 inch 10 inch 12 inch
1 Hydrodynamic Slug Hydrodynamic Slug Hydrodynamic Slug
4 Hydrodynamic Slug Hydrodynamic Slug Hydrodynamic Slug
8 Hydrodynamic Slug Hydrodynamic Slug Severe Slug
12 Hydrodynamic Slug Severe Slug Severe Slug
CPTC NOVEMBER 1994 74
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
6.1.2 Slug Length Prediction
We need to estimate the slug lengths for the various cases. As mentioned in the text, the
use of correlations for slug length prediction is not very accurate. Unless a transient model
is available, however, these predictions are the best available method.
The output for the Pipephase "SLUG" option prints tables summarizing the predictions of
the Brill, et al. correlation. It also indicates an approximate slug length for severe slugging.
The Brill, et al. predictions will be used as the basis for predicting slug length in
hydrodynamic slug flow, and the Pots πss method will be used as the basis for predicting
slug length in severe slugging. These estimates will be checked against the predictions of
the Hill & Wood model for hydrodynamic slugging and the predictions of the OLGA
transient model.
In severe slugging, the operation is cyclic:
• The low spot fills with liquid, blocking the flow;
• Liquid builds in the pipeline and riser until the pressure behind the liquid slug builds to
a high enough level to push the slug out;
• The liquid exits the system as a slug, increasing in velocity as the gas behind the slug
expands;
• When the gas has exited the riser, liquid will fall back down the riser, and drain in from
the pipeline, starting the cycle again.
The slug length is estimated by:
Ls = Lr / πss
where Lr is the riser height in feet.
The slug length should not vary much for a constant rate, since the operation in cyclic.
The maximum slug length therefore is approximately equal to the average slug length.
The values for the slug length reported in Pipephase for the 3 severe slugging conditions
are:
CPTC NOVEMBER 1994 75
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
a) For the 10" Line, Year 12 - Ls = 2392 ft.
b) For the 12" Line, Year 8 - Ls = 3140 ft
c) For the 12" Line, Year 12 - Ls = 829 ft
The large decrease in the slug length for the 12" line, year 12 is due to the large increase in
holdup in the line predicted by Beggs and Brill. The accuracy of this value is doubtful.
For the hydrodynamic slugging cases, the "SLUG" report in Pipephase contains
predictions of the average slug length and the slug length distribution using the Brill, et al.
model. As detailed in the text, the Brill method is based on a very small amount of data,
and it doesn’t account for most of the variables, which play a part in slug flow.
To use the Brill slug length model to estimate the maximum size of a slug for equipment
selection, the designer needs to estimate the slug length corresponding to a design
occurrence frequency. A reasonable philosophy would be to design the separator/slug
catcher for the once per year slug. Estimating the average slug frequency from the
Pipephase "SLUG" report, the number of slugs per year can be calculated. The slug
distribution table above can be used to estimate the slug length corresponding to one
occurrence in this number of slugs per year.
For example, the year 1 rate through the 10" line gives a slug frequency of 98.4 seconds
by the Brill model. This frequency corresponds to
(365 D/yr * 86,400 sec/D) / 98.4 sec = 320,500 slugs/yr
If one slug per year can be greater than the design slug, the design slug must be at the
(1 - 1/320500) * 100 = 99.9997 percentile
The average slug, according to Brill, is 293 ft long. The maximum allowable slug would
then be about 10.5 times as long as the average or 3080 ft long.
The design percent slug was calculated for all the other hydrodynamic slug cases. The
design slug was close to the 99.9999% slug length for all cases, using the one slug per
CPTC NOVEMBER 1994 76
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
year criteria. Tabulating the 99.9999% data for the hydrodynamic slug cases gives design
slug lengths (in feet) for the various cases of:
Year No. 8 inch 10 inch 12 inch
1 2152 3153 4250
4 2079 3050 4113
8 1943 2847 3140*
12 1848 2392* 829*
* Terrain slugs
To calculate the liquid surge requirements for the separator based on these slug lengths,
additional information is needed. Since the slugs consist of aerated liquid, the liquid
holdup in the slug must be known in order to determine the volumetric rate entering the
separator. The surge volume required also depends in large measure on the capacity of the
liquid dump valves on the separator.
The Pipephase "SLUG" table includes a calculation of the liquid holdup in the slug, based
on the Brill, et al. method. The tabulated value for the "liquid from the slug" is equal to:
Volslug = Vm Hls Ap ts
where Hls is the liquid holdup in the slug, Ap is the pipe cross-sectional area, and ts
is the time that the liquid slug exits the pipeline.
The required surge volume for the separator is:
Volsurge = Volslug - ts Qdump
where Qdump is the volumetric capacity of the dump valve.
For this example, we will assume that the volumetric capacity of the dump valve is 1.33
times the design oil rate. This assumption gives a Qdump of 1.35 ft3/sec. The separator is
also assumed to be a 2-phase separator.
CPTC NOVEMBER 1994 77
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
With these assumptions, the design surge volumes (ft3) for the hydrodynamic slugging
cases are:
Year No. 8 inch 10 inch 12 inch
1 145 561 1398
4 195 654 1506
8 101 294 —
12 0 — —
It is more difficult to estimate the slug volumes for the severe slugging cases using only
steady state analysis. For a crude approximation of the behavior, use the following:
a) Slug buildup phase
When the slug is building up, there is essentially no flow out of the pipeline. The time
required to build the slug is approximately:
tbu = Ls/vsl
The liquid rate out of the line is ~0 during this time.
b) Slow gas expansion phase
After the gas pressure has built to a high enough level to push the slug, the liquid rate
out of the line is approximately equal to the mixture velocity, Vm. The time required
for this phase is tsg.
c) Fast gas expansion
When the liquid slug is shorter than the riser pipe, the gas behind the slug expands
rapidly. The velocities in the riser may reach 60-80 ft/sec. This time period is so much
smaller than the others that it can be assumed to be virtually instantaneous. The liquid
rate is so high that essentially all the liquid produced during this time goes into the
separator surge.
With this simplified model, the flowrates out of the pipe can be estimated. The slug cycle
time (tc) is equal to tbu + tsg. The liquid produced during one cycle is equal to tc * Vsl * Ap.
The liquid leaving the pipeline during the slug buildup phase is essentially 0, and the
CPTC NOVEMBER 1994 78
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
volume of liquid exiting during the fast gas expansion is equal to the riser volume. The
remainder of the liquid must exit during the slow gas expansion phase. Therefore,
(tbu + tsg) Vsl Ap = (tsg Vm Ap) + (Lr Ap)
tsg = [(tbu Vsl) - Lr] / Vsg
tsg = (Ls - Lr) / Vsg
To illustrate the use of these equations, we will check the outlet rates for the 10" line at
year 12. The values for the key parameters are Ls = 2392 ft. Vsg = 0.90 ft/sec, Vsl = 0.69
ft/sec, Ap=0.492 ft2, and Lr = 100 ft. The value for tbu = 2392/0.69=3467 sec. The value
for tsg = (2392-100)/0.90 = 2547 sec.
The model indicates that the liquid flowrate out of the line is:
0 ft3/sec for 0<t<3467
(0.90+0.69) * 0.492 = 0.782 ft3/sec for 3467<t<6014
Infinity for t=6014, Volume=0.492 x 100-49.2 ft3
Since the 0.782 ft3/sec is less than the Qdump of 1.35 ft3/sec, the liquid will not accumulate
in the separator during the slow gas expansion phase. The required surge volume therefore
is 49.2 ft3.
Completing these calculations for the other severe slugging cases gives the following
tabulation for the required surge volumes (ft3) for all the cases:
Year No. 8 inch 10 inch 12 inch
1 145 561 1398
4 195 654 1506
8 101 294 935
12 0 49 71
Using the Brill analysis, the required surge volume for the downstream separator would be
654 ft3 for the 10" line.
CPTC NOVEMBER 1994 79
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
6.1.3 Slug Frequency and Length by Hill & Wood Method
The Hill & Wood correlation for slug frequency will be used to check the slug length
predictions and surge volume predictions. To use the Hill & Wood method, a calculation
of the liquid holdup at the beginning of the pipeline must be made using the Taitel-Dukler
stratified flow model. The method assumes a horizontal pipeline. The value for the
Lockhart & Martinelli X factor can be calculated from the following equation:
0.9 0.4 0.1
V ρl µl
X = sl
ρ
µ
Vsg g g
Once X is known, the value for the liquid holdup for stratified flow can be read from
Figure I:5-1. The actual gas and liquid velocities can be calculated from the superficial
velocities and the stratified flow liquid holdup. Once these parameters are known, the slug
frequency can be calculated.
To illustrate the procedure, the slug frequency for the 10" line for the year 1 conditions
will be calculated. The values for the required parameters at the beginning of the pipeline
are:
Vsg = 5.40 ft/sec ρg = 1.10 lb/ft3 µg = 0.012 cp
Vsl = 2.10 ft/sec ρl = 53.97 lb/ft3 µl = 7.1 cp
X is then:
X= (2.1/5.4)°~9 * (53.97/1.1)° 4 * (7.1/.012)°~1 = 3.84
The value for the stratified flow liquid holdup, using the Taitel-Dukler model for
horizontal flow, is:
Hle=0.68
read from Figure I:5-1.
The actual gas velocity is:
CPTC NOVEMBER 1994 80
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
Ug = Vsg/(1 HIe) = 5.40/(1-.68) = 16.88 ft/sec
The actual liquid velocity is:
Ul = Vsl/Hle = 2.1/.68 = 3.09 ft/sec
Putting these values into the Hill & Wood slug frequency equation gives:
Fs = 2.74 Hle (Ug - Ul) / (D (l -HIe))
= (2.74) (0.68) (16.88-3.09)/[(9.5/12)(1-.68)]
= 101 slugs/hour
The length of the average slug plus bubble unit would be:
Ls + Lb = (Vm) (3600)/Fs = (7.5 ft/sec) (3600 sec/hour) (1 hour)/101 slugs
= 267 ft
To estimate the slug length, the slug fraction must be calculated. There are several ways to
do this. This example will show the easiest way to estimate the slug fraction.
First, the liquid holdup in the slug will be estimated. The Gregory, Nicholson, and Aziz
method is the easiest method to use, and it is as accurate as most of the methods. The
liquid holdup in the slug is given by:
Hls = l [l +(V,,’/28.4)1.39]
= 1/[1+(7.5/28.4)1.39]
= 0.864
The liquid holdup in the bubble can be assumed to be ~0.20 for much of the slug flow
range. From a material balance, the slug fraction can be calculated from these values and
the overall liquid holdup prediction:
SF = (Hl - Hlb) /(Hls - Hlb)
CPTC NOVEMBER 1994 81
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
Hl = 0.42 by the Beggs and Brill method at the beginning of the pipeline.
Therefore,
SF = (0.42 - 0.20)/(0.864 - 0.20)
= 0.33
Since the slug fraction is equal to the slug length divided by the slug length plus bubble
length, the slug length is equal to:
Ls = SF (Ls + Lb)
= 0.33 x 267
= 88ft.
This value for the average slug length is much less than the 293 ft average slug length
calculated by the Brill et al. method.
The average slug lengths for the 10" line are:
Year Number Average Slug Length, ft.
1 88
4 52
8 49
12 Terrain Slugging
The Hill and Wood method does not predict a slug length distribution. Experimental
evidence from the Prudhoe Bay field tests and BHRG laboratory studies indicate that the
maximum slug length is approximately 6 times the average slug length. Using this value,
the design slug lengths are:
CPTC NOVEMBER 1994 82
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
Year Number Average Slug Length, ft.
1 528
4 312
8 294
12 2392
The design surge volume would be:
Volsurge = (Lsdes Hls Ap) - [(Lsdes Qdump) / Vm]
For the year 1 conditions, this volume is:
Volsurge = [(528 ft) x (.864) x (0.492 ft2 )] - [(528 ft) x (1.35 ft3/sec) / (7.50 ft/sec)]
= 129ft3
The values of the design surge volume for the 10" line during all the years are:
Year Number Average Slug Length, ft.
1 129
4 76
8 2
12 49
The design surge volume using the Hill & Wood method of 129 ft3 is considerably less
than the 654 ft3 calculated by use of the Brill et al. method. For comparison, the liquid
volume needed for separation is about 200 ft3, based on a 3 minute liquid residence time in
the vessel.
The transient OLGA program was run for the four design cases for the 10" line. The inlet
pressures using OLGA for the cases were:
CPTC NOVEMBER 1994 83
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
Year Number OLGA Beggs and Brill
1 228 psig 301 psig
4 187 psig 242 psig
8 115 psig 133 psig
12 101-113 psig 115 psig
The pressure drops calculated by OLGA are much less than the Beggs and Brill pressure
drops. This is due in part to the physical properties used in the OLGA runs, since OLGA
uses a compositional model similar to Pipephase’s compositional model. Most of the
difference, however, is due to the different multiphase flow models. OLGA tends to
predict pressure drops that are too low in slug flow, and Beggs and Brill tends to
overpredict pressure drops. The actual inlet pressure is between the two answers. For year
1, for instance, the expected inlet pressure would probably be about 270-280 psig.
The flow regimes predicted by OLGA were:
Year Number Flow Regime
1 Hydrodynamic Slug Flow
4 Hydrodynamic Slug Flow
8 Hydrodynamic Slug Flow
12 Terrain Slug Flow
OLGA confirms the Pipephase flow regime predictions, which indicated the line should be
in slug flow for years 1 through 8, and then experience terrain slugging in year 12.
The liquid holdup predictions of OLGA were:
Year Number OLGA Beggs and Brill
1 1365 bbl 1336 bbl
4 1831 bbl 1683 bbl
8 2565 bbl 2018 bbl
12 2915 bbl 3093 bbl
CPTC NOVEMBER 1994 84
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
The liquid holdup predictions of OLGA and Beggs and Brill are quite close. Beggs and
Brill’s holdup predictions in slug flow are pretty good, as seen above, but they can be very
poor for stratified flow, as shown in Example 2.
For the year 12 conditions, OLGA shows a cyclic terrain slugging pattern, as seen in
Figures 1:6-1 to I:6-4. The results shown for about the first 15,000 seconds reflect the
initial conditions selected for the problem, and can be ignored. After 15,000 seconds, a
cyclic pattern of terrain slugs is seen. Every 2400 seconds, a slug exits the pipeline with a
volume of about 11 cubic meters (-70 bbls). This slug volume corresponds to a slug
length of ~790 feet, which is considerably smaller than the 2392 feet predicted by the Pots
method. The OLGA results are much more believable than the Pots predictions. The
pressure oscillates between 101 psig and 113 psig. The liquid mass flow rate out of the
pipeline peaks at a rate of about 40 kg/sec, which corresponds to an instantaneous
flowrate of 21,700 BPSD, compared to the average flowrate of 5203 BPSD. The gas flow
rate peaks at about 0.28 kg/sec, which is equivalent to 1.0 mmSCFD, compared to its
average rate of 0.26 mmSCFD.
The slug-tracking model in OLGA V3.1 was run for the three years that were in
hydrodynamic slug flow. The slug-tracking model tracks each individual slug, and
determines whether it grows, dissipates, or merges with another slug as it flows down the
line.
The slug-tracking runs for these cases, however, were unable to converge on a value for
the average slug length. For year 1, for example, runs were made with three different
numbers of pipeline segments. If the model converges on a solution, the slug length would
be independent of the number of segments used. For this case, the average slug length vs.
number of pipeline segments was:
Number of Segments Average Slug Length, feet
79 197
154 82
294 51
CPTC NOVEMBER 1994 85
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
The maximum number of pipeline segments in the commercial version of OLGA is 297.
Since the slug length was still decreasing using the maximum number of segments, the
program had not reached a value for the slug length that was independent of pipeline
discretization. As a result, the only conclusion that can be drawn from the slug-tracking
analysis is that the average slug length is probably less than 50 feet for the year 1
conditions.
The slug-tracking predictions are in line with the results of the Hill and Wood model.
Both predictions are much less than the Brill, et al. method.
In summary, the OLGA runs verified that the 10" pipeline should be capable of flowing all
rates within the allowable pressure drop. They confirmed that the pipeline would be in
hydrodynamic slug flow for the first 8 years, and then operate in the terrain slug flow
regime by year 12. The slug lengths predicted by Pipephase for the terrain slugging case
were found to be too large, and the slug lengths for the hydrodynamic slugging cases were
predicted to be of the same magnitude as the Hill and Wood predictions.
If this example was an actual design, checks of other transient phenomena such as startup,
shutdown, rate changes, etc. should be performed to determine whether they would cause
slugs which would govern the size of the slug catcher.
Based on this analysis, the slug catcher should be designed for a surge volume of about
150 ft3, based on the Hill and Wood results.
6.2 EXAMPLE 2 - Gas/Condensate Line
A pipeline is needed to flow the production from a subsea well development to shore. The
offshore field produces a mixture of gas, water, and condensate. Glycol is injected into
the line for hydrate suppression. The water quantity is about 4 bbl/mmSCF, and the
condensate production rate is also about 4 bbl/mmSCF. The peak production rate is 500
mmSCFD of gas and condensate. The minimum turndown is 25% of design rate.
The arrival pressure onshore is 900 psia. The inlet pressure to the line cannot exceed
1200 psia under normal operation.
The wellstream composition, including water and injected glycol is given in Table 1.
CPTC NOVEMBER 1994 86
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
The pipeline elevation profile is shown in Table II.
The wellhead pressure will decrease with time as the reservoir becomes depleted. Initially,
the wellhead pressure will be over 4000 psig. For design, the wellhead temperature and
pressure are estimated to be 222 degrees F and 1215 psia, simulating conditions late in the
life of the field.
The pipeline is unburied, and is coated with 3 inches of concrete and 0.125 inches of
epoxy coating.
6.2.1 TABLE I, Wellstream Composition
Component Mole %
N2 3.68468
CO2 11.11650
C1 75.79904
C2 3.82831
C3 1.15655
iC4 0.16298
nC4 0.23880
iC5 0.08426
nC5 0.06506
C6’s 0.05431
C7’s 0.07390
C8’s 0.10359
C9’s 0.07833
C10’s 0.03915
C1l’s 0.02022
Cl2’s 0.01223
CPTC NOVEMBER 1994 87
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
Cl3’s 0.00985
C14's 0.00794
C15's 0.00556
C16’s 0.00460
Cl7’s 0.00248
C18's 0.00157
C19's 0.00126
C20's 0.00074
C21's 0.00073
C22's 0.00054
C23's 0.00037
C24's 0.00031
C25's 0.00024
C26's 0.00019
C27’s 0.00016
C28+ 0.00021
Ethylene Glycol 0.12530
Water 3.32004
Totals 100.00000
6.2.2 TABLE 11, Pipeline Elevation Profile
Cumulative Distance, km Water Depth, m Segment Length, ft Elevation Change, ft
0.0 216
0.35 218 1148 -6.6
1.45 218 3608 0.0
1.75 219 984 -3.3
2.25 219 1640 0.0
CPTC NOVEMBER 1994 88
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
2.55 218 984 3.3
3.15 218 1968 0.0
3.45 219 984 -3.3
3.95 219 1640 0.0
4.30 218 1148 3.3
6.35 218 6724 0.0
6.90 217 1804 3.3
7.30 217 1312 0.0
7.75 218 1476 -3.3
7.95 218 656 0.0
8.30 216 1148 6.6
8.90 214 1968 6.6
9.70 210 2624 13.1
10.00 208 984 6.6
10.40 208 1312 0.0
11.20 200 2624 26.2
12.40 190 3936 32.8
13.45 180 3444 32.8
14.45 170 3280 32.8
15.70 160 4100 32.8
16.95 150 4100 32.8
18.45 140 4920 32.8
20.20 130 5740 32.8
22.10 120 6232 32.8
24.10 110 6560 32.8
25.85 100 5740 32.8
30.25 90 14432 32.8
34.60 80 14268 32.8
42.10 70 24600 32.8
49.55 65 24436 16.4
56.15 65 21648 0.0
60.45 65 14104 0.0
61.75 60 4264 16.4
63.05 50 4264 32.8
CPTC NOVEMBER 1994 89
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
74.25 40 36736 32.8
78.50 30 13940 32.8
79.45 25 3116 16.4
80.85 20 4592 16.4
81.95 15 3608 16.4
82.60 10 2132 16.4
83.40 5 2624 16.4
84.10 0 2296 16.4
6.2.3 Pipephase Simulation Comparisons
Pipephase simulations of the operation were made for 3 rates (125, 250, and 500
mmSCFD) for two line sizes (30" and 28"). Since this line is a gas-condensate line, the
Oliemans method was used to estimate the pressure drop in the system. The Taitel-
Dukler-Barnea method was used to predict the flow regime. As a check, the Beggs and
Brill method was run for the selected line size. A transient analysis of this line was also
performed using OLGA. It will therefore be possible to compare the predictions of
Oliemans and Beggs and Brill against OLGA.
The inside diameters used for the 30" line was 28.5", and the inside diameter for the 28"
line was 26.5".
The predicted inlet pressures using the Oliemans correlation were:
Production Rate, mmSCFD 30” Line 28” Line
125 932 psig 938 psig
250 970 psig 994 psig
500 1120 psig 1200 psig
CPTC NOVEMBER 1994 90
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
The 30" line is comfortably within the wellhead pressure specification. The 28" line is right
on the specification at design rate.
A check of the pressure drop for the 28" line using the Beggs and Brill correlation gives:
Production Rate, mmSCFD Inlet Pressure, psig
125 947
250 1008
500 1226
Beggs and Brill indicates a higher pressure drop than Oliemans, making the 28" line more
questionable. Both line sizes will continue to be checked. The OLGA transient simulations
will be used as a third check of the pressure drop to determine whether the 28" line
appears acceptable.
The total liquid holdup for the line (barrels) using Oliemans and Beggs and Brill were:
Production Rate, Oliemans - 30” Oliemans - 28” Beggs-Brill - 28”
mmSCFD
125 11,760 9,480 14,560
250 7,890 6,280 13,100
500 5,000 4,230 12,340
The superficial gas and liquid velocities are not printed in the Pipephase output. The
superficial velocities can be calculated from the actual gas or liquid velocities and the
liquid holdup. For gas/condensate lines, this is difficult because of the poor formatting of
the liquid holdup in the output table. Pipephase prints the value of the liquid holdup as a
two decimal place value (e.g. 0.02), which is not adequate to accurately determine the
superficial velocities. For holdup below 0.005, Pipephase prints 0.00. Fortunately, it is
possible to calculate accurate values for the superficial gas and liquid velocities and liquid
CPTC NOVEMBER 1994 91
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
holdup from the information give in the output table. The superficial liquid velocity can be
calculated from the formula:
Vsl = [Ul(Ug - Vm)]/(Ug- Ul)
where Ug = Actual gas velocity, ft/sec
Ul = Actual liquid velocity, ft/sec
Vm = Mixture velocity, ft/sec
The superficial gas velocity can be calculated by:
Vsg = Vm - Vsl
The liquid holdup is given by:
HI = Vsl / Ul
The superficial gas velocities (ft/sec) for the various cases are:
Production Rate, Oliemans - 30” Oliemans - 28” Beggs-Brill - 28”
mmSCFD
125 4.66 5.39 5.38
250 9.32 10.77 10.77
500 18.54 21.40 21.38
The superficial liquid velocities (ft/sec) are:
Production Rate, Oliemans - 30” Oliemans - 28” Beggs-Brill - 28”
mmSCFD
125 0.0189 0.0224 0.0226
CPTC NOVEMBER 1994 92
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
250 0.0381 0.0439 0.0471
500 0.0787 0.0884 0.0895
The values of C in the erosion velocity for the various cases are:
Production Rate, Oliemans - 30” Oliemans - 28” Beggs-Brill - 28”
mmSCFD
125 0.0189 0.0224 0.0226
250 0.0381 0.0439 0.0471
500 0.0787 0.0884 0.0895
All the C values are well below 100, so corrosion-erosion should not be a concern.
The dominant flow regimes for the various cases, using the Taitel-Dukler-Barnea method
are:
Production Rate, Oliemans - 30” Oliemans - 28” Beggs-Brill - 28”
mmSCFD
125 Slug Slug Slug
250 Strat./Slug Strat./Slug Strat./Slug
500 Strat./Annul. Strat./Annul. Strat./Annul.
The line is shown to be in slug flow at the 125 mmSCFD rate. Some of the segments of
the line are shown to be in slug flow at 250 mmSCFD, while others are shown to be in
stratified flow. For the 500 mmSCFD rate, all the segments are shown to be in either
stratified or annular flow.
Pipephase will not print a slug report for the runs in which the Oliemans correlation was
used. It did print slug lengths for the Beggs and Brill runs. The slug lengths predicted by
CPTC NOVEMBER 1994 93
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
the Brill et al. method are 1460 to 1580 ft average slug length for the 28" line. These
numbers are very unrealistic for gas/condensate systems of this diameter.
The design criterion for the slug catcher surge volume is usually the liquid volume
associated with pigging the pipeline. This volume can be estimated from the Pipephase
output.
The pig travels at approximately the mixture velocity, Vm. The average values for Vm
(ft/sec) for the various cases is:
Production Rate, Oliemans - 30” Oliemans - 28” Beggs-Brill - 28”
mmSCFD
125 4.87 5.62 5.59
250 9.54 10.92 10.79
500 17.61 19.54 19.28
The pipeline is 84.1 km or 275,850 ft. long. The pig traverse times (seconds), therefore,
are:
Production Rate, Oliemans - 30” Oliemans - 28” Beggs-Brill - 28”
mmSCFD
125 56,640 49,080 49,350
250 28,920 25,260 25,570
500 15,660 14,120 14,310
An approximation of the volume of the slug ahead of the pig is that the slug volume is
equal to the liquid holdup minus the amount of liquid produced during the pig traverse
time. Numerically, this equates to:
Volslug = (Hl Ap Lp) -( tpig Vsl Ap)
CPTC NOVEMBER 1994 94
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
The slug volumes (barrels) for the various cases are:
Production Rate, Oliemans - 30” Oliemans - 28” Beggs-Brill - 28”
mmSCFD
125 10,920 8,730 13,800
250 7,020 5,520 12,280
500 4,030 3,380 11,470
If transient analysis is not available, the table above would be used to design the surge
volume required for the slug catcher. For the 28" line, the slug catcher would be sized for
the 13,800 bbl surge volume, with the recognition that neither Oliemans nor Beggs-Brill
predicts liquid holdup well for gas/condensate pipelines.
We will use the OLGA transient program to check the design of the line to confirm the
line size, determine whether slugging is likely, and size the slug catcher.
OLGA simulations were run at the three design rates for both the 28 inch and 30 inch
lines. The predicted inlet pressures at the various rates were:
Rate, mmSCFD 30 Inch 28 Inch
125 1045 psig 1018 psig
250 980 psig 982 psig
500 1100 psig 1179 psig
A comparison of the OLGA, Oliemans, and Beggs and Brill predictions for the 28 inch
line at the various rates is:
CPTC NOVEMBER 1994 95
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
Rate, mmSCFD OLGA Oliemans Beggs-Brill
125 1018 psig 938 psig 947 psig
250 982 psig 970 psig 1008 psig
500 1179 psig 1200 psig 1226 psig
The Oliemans predictions match the OLGA predictions quite closely, except at the lowest
rate. The difference between Oliemans and OLGA at the 125 mmSCFD rate is due to the
high liquid holdup predicted by OLGA, as shown below. The OLGA results confirm that
the pressure drop in the pipeline is less than the allowable drop for the 28" line, so the 28"
line can be used.
The predicted liquid holdups from OLGA are:
Rate, mmSCFD 30 Inch 28 Inch
125 52,800 bbls 32,900 bbls
250 8,800 bbls 3,790 bbls
500 3,310 bbls 2,650 bbls
Comparing these results with Oliemans and Beggs and Brill for the 28 inch line shows the
wide disparity in results between the methods:
Rate, mmSCFD OLGA Oliemans Beggs-Brill
125 32,900 bbls 9,480 bbls 14,560 bbls
250 3,790 bbls 6,280 bbls 13,100 bbls
500 2,650 bbls 4,230 bbls 12,340 bbls
These results are plotted in Figure I:6-5. OLGA’s holdup predictions are much higher than
either Oliemans or Beggs and Brill at the lowest flowrate, and they are much lower at the
other rates. The OLGA holdup jumps when the gas velocity is too low to pull the liquid up
the upwardly inclined pipeline segments. OLGA indicates that, for these operating
CPTC NOVEMBER 1994 96
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
conditions, this minimum superficial gas velocity is about 9 ft/sec, corresponding to a
throughput rate of about 220 mmSCFD. Below this rate, the liquid holdup builds up
rapidly. This behavior has been observed in the field and in experimental studies in inclined
flow. Neither Beggs and Brill nor Oliemans model this sensitivity to flowrate in inclined
pipes.
The predicted flow regimes from the OLGA simulations were:
Rate, mmSCFD 30 Inch 28 Inch
125 Stratified and Slug Stratified and Slug
250 Stratified Stratified
500 Stratified Stratified
OLGA shows that some of the pipeline segments are in slug flow at the 125 mmSCFD
rate for both line sizes. For the higher rates, all of the segments are shown to be in
stratified flow. The comparison between the OLGA results and the Taitel-Dukler-Barnea
predictions is:
Rate, mmSCFD OLGA Taitel et al.
125 Strat./Slug Slug
250 Strat. Strat./Slug
500 Strat. Strat./Annul.
Although the comparison might not seem very good, the results of the two methods are
fairly close. OLGA predicts a somewhat lower transition velocity from Stratified to Slug
flow than Taitel-Dukler-Barnea, so that it shows slug flow only at the lowest rate. At the
highest rate, the predictions are really the same, since OLGA shows stratified flow with
considerable entrainment. Visually, this is indistinguishable from annular mist flow. The
only difference between the two methods is at the 250 mmSCFD. A good rule of thumb is
that slug flow does not occur for liquid holdups less than about 20%. The liquid holdup by
both the Oliemans and Beggs and Brill methods for the 250 mmSCFD rate is <7%, so the
CPTC NOVEMBER 1994 97
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
prediction of slug flow by Taitel, et al. doesn’t appear likely. The OLGA prediction,
therefore, is more believable for this rate.
OLGA simulations for pigging were also performed. The liquid slug sizes ahead of the pig
for the various rates in the 28" line are:
Rate, mmSCFD Liquid Slug Size, bbls
125 33,900
250 3,770
500 1,920
If the line is run to equilibrium at the lowest rate, the slug catcher would have to be sized
for about 40,000 bbls. The capital expenditure to build a slug catcher that large would be
very significant. The best solution for the slug catcher design probably is to size the slug
catcher for the 250 mmSCFD rate, and pig the line frequently when the rate is less than
250 mmSCFD. To get an estimate of the pigging frequency that would be required,
calculate the time required to produce ~3770 bbls of liquid from the wellstream at the
desired rate. At 125 mmSCFD, the pigging frequency would be:
3770 bbls * 42 gal/bbl / 7.48 gal/ft / Vsl ft/sec / Ap ft2 / 3600 sec/hr / 24hr/D =
3770 * 42 / 7.48 / 0.0224 / 3.83 / 3600/ 24 = 2.86 days
If the line is pigged every 2-3 days at the 125 mmSCFD rate, the smaller slug catcher
could be used.
The design volume for the slug catcher should comprehend errors in the composition,
pipeline topography, and errors in the multiphase flow methods. The amount of the
increase should be based on sound engineering judgment. For our example, the 3770 bbl
maximum slug size calculated for the 250 mmSCFD rate should be increased to a design
slug catcher surge volume of at least 5000 bbls.
CPTC NOVEMBER 1994 98
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
In summation, the best design for this pipeline would be:
a) install a 28" line;
b) install a slug catcher with a 5000 bbl surge capacity;
c) pig the line every 2 days at production rates less than 250 mmSCFD.
CPTC NOVEMBER 1994 99
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
Figure I: 6-1 Liquid Holdup for Example 1, Year 12
CPTC NOVEMBER 1994 100
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
Figure I: 6-2 Inlet Pressure for Example 1, Year 12
CPTC NOVEMBER 1994 101
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
Figure I: 6-3 Liquid Flowrate Out of line, Example 1, Year 12
CPTC NOVEMBER 1994 102
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
Figure I: 6-4 Gas Flowrate Out of line, Example 1, Year 12
CPTC NOVEMBER 1994 103
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
Figure I: 6-5 Liquid Holdup Predictions for Example 2
CPTC NOVEMBER 1994 104
PART I - MULTIPHASE PIPELINE & SLUG CATCHER DESIGN GUIDE
SECTION 7.0 - REFERENCES
Barnea, D. “A Unified Model for Predicting Flow-Pattern Transitions for the Whole
Range of Pipe Inclinations,” Int. J. Multiphase Flow 13, No. 1, 1-12,, 1987.
Bendiksen, et al., “The Dynamic 2-Fluid Model OLGA: Theory and Application,” SPE
Production Engineering, pg. 171, May 1991.
Brill, J.P., et al., “Analysis of Two-Phase Tests in Large-Diameter Flow Lines in Prudhoe
Bay Field,” Society Petroleum Engineering Journal, pgs. 363-347, June 1981.
Hill, T.J. and Wood, D.G., “A New Approach to the Prediction of Slug Frequency,”
Society of Petroleum Engineers, pgs. 141-149, SPE 20629, 1990.
Taitel, Y. and Dukler, A.E., “A Model for Predicting Flow Regime Transitions in
Horizontal and Near Horizontal Gas-Liquid Flow,” AIChE Journal, 22, No. 1, pgs. 47-55,
1976.
CPTC NOVEMBER 1994 105
Você também pode gostar
- 1 Intro To MF Hydraulics UpdDocumento38 páginas1 Intro To MF Hydraulics UpdHoang Nguyen MinhAinda não há avaliações
- Kupe Flow AssuranceDocumento71 páginasKupe Flow Assurancemctimlim100% (3)
- FA With OLGA Exercises - 20070522Documento36 páginasFA With OLGA Exercises - 20070522Amin100% (1)
- Chevron OLGA User MeetingDocumento80 páginasChevron OLGA User MeetingMohamed Hushain100% (2)
- Pvtsim OlgaDocumento26 páginasPvtsim OlgaBehnam Hosseinzadeh100% (1)
- PVT - Exercise 3Documento32 páginasPVT - Exercise 3girlfriendmrvingAinda não há avaliações
- SPT OLGA Drain RateDocumento69 páginasSPT OLGA Drain RatecsharpplusAinda não há avaliações
- Print Able Olga 7 User ManualDocumento286 páginasPrint Able Olga 7 User ManualAzira Nasir100% (1)
- OLGA ExampleDocumento99 páginasOLGA ExampleHoang Nguyen Minh100% (3)
- Heat Transfer in Olga 2000Documento11 páginasHeat Transfer in Olga 2000Akin MuhammadAinda não há avaliações
- Flow Assurance - AOEDocumento19 páginasFlow Assurance - AOEAmeya SaneAinda não há avaliações
- Pvtsim: The Olga 2000 Fluid Property PackageDocumento24 páginasPvtsim: The Olga 2000 Fluid Property Packagesterling100% (1)
- Pipesim 2015 GL CCEDocumento7 páginasPipesim 2015 GL CCELuffy's Fights100% (1)
- Part 2 - Single Phase FlowDocumento34 páginasPart 2 - Single Phase FlowAbd Rashid Abd AzizAinda não há avaliações
- Integrated Approach To Flow Assurance AnDocumento19 páginasIntegrated Approach To Flow Assurance Anrezki eriyando100% (1)
- Flow Assurance in Subsea Production 01Documento54 páginasFlow Assurance in Subsea Production 01Festus AdeyemoAinda não há avaliações
- OLGA Submodelling GuideDocumento18 páginasOLGA Submodelling GuideAnonymous 8te2h1Ainda não há avaliações
- Flow AssuranceDocumento80 páginasFlow AssuranceArief IhsanAinda não há avaliações
- OLGA 2014 New Functionalities For Well and DrillingDocumento26 páginasOLGA 2014 New Functionalities For Well and DrillingAkin MuhammadAinda não há avaliações
- OLGA6 Tips & TricksDocumento26 páginasOLGA6 Tips & TricksYTAinda não há avaliações
- Pipesim HistoryDocumento22 páginasPipesim Historydndudc100% (1)
- Choke PerformanceDocumento18 páginasChoke PerformanceJúlio César Nascimento100% (2)
- Quest Pipelines FlowDocumento83 páginasQuest Pipelines FlowKrishna RaoAinda não há avaliações
- Investigating Slug Flow Characteristics of A Pipline Riser System Using Olga Simulation ToolDocumento10 páginasInvestigating Slug Flow Characteristics of A Pipline Riser System Using Olga Simulation ToolmAinda não há avaliações
- Reservoir Fluid Sampling (Lulav Saeed)Documento15 páginasReservoir Fluid Sampling (Lulav Saeed)Lulav BarwaryAinda não há avaliações
- Advanced Well TestingDocumento12 páginasAdvanced Well TestingDinesh KanesanAinda não há avaliações
- A STUDY ON SELECTION AND DESIGN OF NATURAL GAS GhatiProsjekt - AnaClara PDFDocumento73 páginasA STUDY ON SELECTION AND DESIGN OF NATURAL GAS GhatiProsjekt - AnaClara PDFninoska217608Ainda não há avaliações
- Gaswellloading - XLS: This Spreadsheet Calculates The Minimum Unloading Gas Production Rate. InstructionsDocumento9 páginasGaswellloading - XLS: This Spreadsheet Calculates The Minimum Unloading Gas Production Rate. Instructionsmath62210Ainda não há avaliações
- OLGA2000 TransientSimulationDocumento89 páginasOLGA2000 TransientSimulationesraates44Ainda não há avaliações
- PIPESIM Fundamentals: Workflow/Solutions TrainingDocumento206 páginasPIPESIM Fundamentals: Workflow/Solutions TrainingFco Ignacio CamineroAinda não há avaliações
- 6.26 Transient Analysis Depressurising and Venting (Pipeline)Documento54 páginas6.26 Transient Analysis Depressurising and Venting (Pipeline)shivajireturnsAinda não há avaliações
- FA With OLGA Exercises 20070522Documento36 páginasFA With OLGA Exercises 20070522abc123asd100% (2)
- Transient OperationsDocumento44 páginasTransient OperationsAKOGU J. AKPOCHI J.Ainda não há avaliações
- STATOIL-Slug ControlDocumento28 páginasSTATOIL-Slug Controlviswalng100% (1)
- SPE 152975 Using Dynamic Simulations To Optimize The Start-Up Procedure of A Lazy Horizontal Oil WellDocumento11 páginasSPE 152975 Using Dynamic Simulations To Optimize The Start-Up Procedure of A Lazy Horizontal Oil Wellmatheus_moreira0990Ainda não há avaliações
- Considerations in Designing Multiphase Flow LinesDocumento8 páginasConsiderations in Designing Multiphase Flow LinesCuando la dictadura es un hecho, la Revolución es un derechoAinda não há avaliações
- Spe 99446Documento8 páginasSpe 99446Nana Silvana AgustiniAinda não há avaliações
- Pipesim Fundamentals 2009.1Documento166 páginasPipesim Fundamentals 2009.1Jorge CarmonaAinda não há avaliações
- Flow Assurance ExercisesDocumento7 páginasFlow Assurance ExercisesBruno SoaresAinda não há avaliações
- Flow Assurance Technology Options Pipe Sizing For Deep Water Long Distance Oil Gas TransportDocumento40 páginasFlow Assurance Technology Options Pipe Sizing For Deep Water Long Distance Oil Gas TransportIsaac Mohanadasan100% (1)
- 4 Reservoir-Fluid-PropDocumento68 páginas4 Reservoir-Fluid-PropPalash Ravi Srivastava50% (2)
- Flowing Well PerformanceDocumento57 páginasFlowing Well PerformancemkwendeAinda não há avaliações
- 01d Modelling and OptimisationDocumento11 páginas01d Modelling and OptimisationMohammad ElhedabyAinda não há avaliações
- Olga Afa PDFDocumento91 páginasOlga Afa PDFSofiane BouradaAinda não há avaliações
- Al Huwaisah GGP Pipeline Project Hydraulic Report: RevisionDocumento49 páginasAl Huwaisah GGP Pipeline Project Hydraulic Report: RevisionQayyum KhanAinda não há avaliações
- Pvts Im HelpDocumento189 páginasPvts Im Helpwarrior_2008Ainda não há avaliações
- Controller OLGADocumento128 páginasController OLGAAnirudh NandanAinda não há avaliações
- 1-Steady State Hydraulic Analysis ReportDocumento39 páginas1-Steady State Hydraulic Analysis ReportrajAinda não há avaliações
- Technical Standards Manual2010 PDFDocumento72 páginasTechnical Standards Manual2010 PDFFilip StojkovskiAinda não há avaliações
- GL - 5days ManualDocumento252 páginasGL - 5days ManualWael FaragAinda não há avaliações
- Manual de Servicio de CX - B LargeDocumento620 páginasManual de Servicio de CX - B LargeElmer Lagua Malpaso67% (3)
- Drafting Purchase Price Adjustment Clauses in M&A: Guarantees, retrospective and future oriented Purchase Price Adjustment ToolsNo EverandDrafting Purchase Price Adjustment Clauses in M&A: Guarantees, retrospective and future oriented Purchase Price Adjustment ToolsAinda não há avaliações
- Dib83-04 Caltrans CMP Culvert Repair Practices Manual PDFDocumento210 páginasDib83-04 Caltrans CMP Culvert Repair Practices Manual PDFmm0493440Ainda não há avaliações
- Multiphase Design Guide Part1Documento104 páginasMultiphase Design Guide Part1ShyBokx100% (3)
- Commercial Gasfier For IGCC ApplicationDocumento292 páginasCommercial Gasfier For IGCC Applicationapi-3799861Ainda não há avaliações
- Evaporation of Cane JuiceDocumento98 páginasEvaporation of Cane Juicesena100% (1)
- R&R PC3000-6D Rev2Documento655 páginasR&R PC3000-6D Rev2Handrean Yudya PratamaAinda não há avaliações
- GODWIN WATER PUMP Installation, Operational and Maintenannce ManualDocumento76 páginasGODWIN WATER PUMP Installation, Operational and Maintenannce ManualNdra' GarinkAinda não há avaliações
- ChemWell R6Documento250 páginasChemWell R6John SmithAinda não há avaliações
- Combustion 20300197Documento249 páginasCombustion 20300197gldias100% (1)
- Heat ExchangerDocumento22 páginasHeat ExchangerYashwant SinghAinda não há avaliações
- Lesson 1 - Solid, Liquid, and Gas (Grade 3)Documento26 páginasLesson 1 - Solid, Liquid, and Gas (Grade 3)Christian TabalanAinda não há avaliações
- 1.9 Oxidation Recution and RedoxDocumento16 páginas1.9 Oxidation Recution and RedoxBhavya shahAinda não há avaliações
- Ndricues Mbi Shtratin e PacientitDocumento1 páginaNdricues Mbi Shtratin e Pacientitdukagjin ramqajAinda não há avaliações
- Calcium Carbonate Filled PolyethyleneDocumento7 páginasCalcium Carbonate Filled PolyethyleneXuân Giang NguyễnAinda não há avaliações
- Fluxus XLF Non-Invasive Flow Meter For Extremely Low Flow RatesDocumento2 páginasFluxus XLF Non-Invasive Flow Meter For Extremely Low Flow RatesMashi JungAinda não há avaliações
- Induction BendingDocumento20 páginasInduction BendingAnoop N Kutty100% (4)
- Khosla's Theory of Hydraulic Structures: 1.1 Exit & Critical GradientDocumento6 páginasKhosla's Theory of Hydraulic Structures: 1.1 Exit & Critical GradientSabin TimalsinaAinda não há avaliações
- D 5656 - 01 - Rdu2ntytmdeDocumento6 páginasD 5656 - 01 - Rdu2ntytmdeJOHNAinda não há avaliações
- Operating MicroscopeDocumento26 páginasOperating MicroscopeAlfred Fredrick0% (1)
- Computational Fluid Dynamics Fundamentals Course: Fluid Mechanics 101 Dr. Aidan WimshurstDocumento51 páginasComputational Fluid Dynamics Fundamentals Course: Fluid Mechanics 101 Dr. Aidan WimshurstRaquel VelascoAinda não há avaliações
- Paper On Dymola Behavior ModelingDocumento9 páginasPaper On Dymola Behavior ModelingDr Vijay BhatkarAinda não há avaliações
- Electric Control Valve: Toko ValexDocumento8 páginasElectric Control Valve: Toko ValexHamdika AbdulAinda não há avaliações
- Combined Set12Documento159 páginasCombined Set12Nguyễn Sơn LâmAinda não há avaliações
- Routine and Special Core AnalysisDocumento33 páginasRoutine and Special Core AnalysisInfinix UserAinda não há avaliações
- Accelerated Aging and Thermal-Mechanical Fatigue MDocumento27 páginasAccelerated Aging and Thermal-Mechanical Fatigue MQUALITY LABORATORYAinda não há avaliações
- TherminolDocumento4 páginasTherminolelfelixAinda não há avaliações
- A Novel Forming Technology For Tailor-Welded BlanksDocumento9 páginasA Novel Forming Technology For Tailor-Welded BlanksGabipmAinda não há avaliações
- HPCL Syllabus 2021 All BranchDocumento8 páginasHPCL Syllabus 2021 All BranchVineeth GangaAinda não há avaliações
- Omala S2 GX 150Documento2 páginasOmala S2 GX 150Kieran MañalacAinda não há avaliações
- Science DLL Grade-3 Q1 Regular-FINALDocumento13 páginasScience DLL Grade-3 Q1 Regular-FINALLhavz Meneses GarciaAinda não há avaliações
- Great Minds of Carbon Equivalent - 1 PDFDocumento3 páginasGreat Minds of Carbon Equivalent - 1 PDFSiva SubramaniAinda não há avaliações
- Edgcse TTPP Cc1-2 SB AnswersDocumento5 páginasEdgcse TTPP Cc1-2 SB Answersegcarty1009Ainda não há avaliações
- Chapter1 The Crystal Structure in SolidsDocumento19 páginasChapter1 The Crystal Structure in SolidsTahsin MorshedAinda não há avaliações
- Facade TreatmentDocumento11 páginasFacade TreatmentfakemasterkgpAinda não há avaliações
- Jurnal Dinding Penahan TanahDocumento11 páginasJurnal Dinding Penahan TanahAnonymous 7npIQ1kYDAinda não há avaliações
- Earth Science Module 5 AnswersheetDocumento2 páginasEarth Science Module 5 AnswersheetCorazon MARCIANOAinda não há avaliações
- Maximizing Wet Scrubber PerformanceDocumento7 páginasMaximizing Wet Scrubber PerformanceHESuarez100% (1)
- Aws D1.1welding Qualification.Documento10 páginasAws D1.1welding Qualification.idealparrotAinda não há avaliações
- UUSITALODocumento9 páginasUUSITALOMarcosAinda não há avaliações