Você também pode gostar
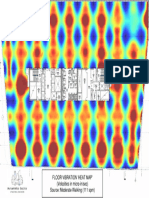
- Lab Floor Vibration Heat Map - Moderate Walking VibrationDocumento1 páginaLab Floor Vibration Heat Map - Moderate Walking Vibrationfarukt90Ainda não há avaliações
- A State-Space Examination of Fictive Constraints: Dionisio Bernal and Omer F. TigliDocumento8 páginasA State-Space Examination of Fictive Constraints: Dionisio Bernal and Omer F. Tiglifarukt90Ainda não há avaliações
- IMAC Surgical Microscope PaperDocumento9 páginasIMAC Surgical Microscope Paperfarukt90Ainda não há avaliações
- Transfer Function ExpansionDocumento7 páginasTransfer Function Expansionfarukt90Ainda não há avaliações
- Transfer Function ExpansionDocumento7 páginasTransfer Function Expansionfarukt90Ainda não há avaliações
- Vibration BasicsDocumento59 páginasVibration Basicsfarukt90Ainda não há avaliações
- A State-Space Examination of Fictive Constraints: Dionisio Bernal and Omer F. TigliDocumento8 páginasA State-Space Examination of Fictive Constraints: Dionisio Bernal and Omer F. Tiglifarukt90Ainda não há avaliações
- Transfer Function ExpansionDocumento7 páginasTransfer Function Expansionfarukt90Ainda não há avaliações
- Spire Vibrations PaperDocumento11 páginasSpire Vibrations Paperfarukt90Ainda não há avaliações
- Vibration Serviceability Criteria For FootbridgesDocumento8 páginasVibration Serviceability Criteria For Footbridgesfarukt90Ainda não há avaliações
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (399)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (119)
- Waves on a String Remote Lab ExplorationDocumento6 páginasWaves on a String Remote Lab ExplorationeewrAinda não há avaliações
- Building Utilities AcousticsDocumento2 páginasBuilding Utilities AcousticsKim SejeongAinda não há avaliações
- CW Doppler Radar Measures Range RateDocumento6 páginasCW Doppler Radar Measures Range RateVenkat SaiAinda não há avaliações
- IGCSE - Physics - MCQ 12 - Light WavesDocumento4 páginasIGCSE - Physics - MCQ 12 - Light WavesHAMAD NoorAinda não há avaliações
- Born Approximation and Scattering Explained 06 - Scattering - PPTDocumento44 páginasBorn Approximation and Scattering Explained 06 - Scattering - PPTAnonymous 39lpTJi100% (1)
- ExamView - Waves and Sound - Practice TestDocumento9 páginasExamView - Waves and Sound - Practice TestMohan RajAinda não há avaliações
- IIT-JAM 2021 - SolutionDocumento38 páginasIIT-JAM 2021 - SolutionHARI PRAHADHISH KAinda não há avaliações
- Physics - Block 3 - Final Revision - Answer KeyDocumento29 páginasPhysics - Block 3 - Final Revision - Answer KeylogineAinda não há avaliações
- Individual Learning Monitoring PlanDocumento6 páginasIndividual Learning Monitoring PlanRhea BernabeAinda não há avaliações
- Module 1 Week 1 and 2Documento11 páginasModule 1 Week 1 and 2Princess Charisse BautistaAinda não há avaliações
- CH1 &CH2 WorksheetDocumento9 páginasCH1 &CH2 WorksheetEstifanos KebedeAinda não há avaliações
- Robert D. Blevins - Flow-Induced Vibration (2001, Krieger Pub Co) PDFDocumento254 páginasRobert D. Blevins - Flow-Induced Vibration (2001, Krieger Pub Co) PDFDang Dinh DongAinda não há avaliações
- Q3 ACTIVITY 3.6 Let's Make Waves!Documento5 páginasQ3 ACTIVITY 3.6 Let's Make Waves!MarilynTorreCameroAinda não há avaliações
- 13 RadioDocumento20 páginas13 Radioya ibrahim9w2yibAinda não há avaliações
- Channel Flow RoutingDocumento21 páginasChannel Flow RoutingKhurram SherazAinda não há avaliações
- Thermal Conductivity of Pipe Insulation Using Lagged PipeDocumento6 páginasThermal Conductivity of Pipe Insulation Using Lagged PipeanbuvrpAinda não há avaliações
- DIFFRACTION OF WAVES EXPLAINEDDocumento53 páginasDIFFRACTION OF WAVES EXPLAINEDPNA100% (1)
- Understanding and Applications of The Appleton-Hartree Formula in Ionospheric Radio Wave PropagationDocumento7 páginasUnderstanding and Applications of The Appleton-Hartree Formula in Ionospheric Radio Wave PropagationschoolhelpmentorAinda não há avaliações
- Lab 6 QuestionsDocumento2 páginasLab 6 QuestionsBanana QAinda não há avaliações
- Signal degradation and distortion in optical fibersDocumento16 páginasSignal degradation and distortion in optical fibersBianAinda não há avaliações
- Atributele lui Dumnezeu din teologia creștinăDocumento8 páginasAtributele lui Dumnezeu din teologia creștinăMAMBOSENKO100% (1)
- Paratoner Nedir - Kalre Aktif ParatonerDocumento8 páginasParatoner Nedir - Kalre Aktif ParatonerHamad GulAinda não há avaliações
- Bridges, high speed and dynamic calculationDocumento8 páginasBridges, high speed and dynamic calculationSingapore GDPAinda não há avaliações
- WPH02 01 Rms 20180308Documento16 páginasWPH02 01 Rms 20180308Daianna PeirisAinda não há avaliações
- Saudi Aramco radiation protection requirements for analytical x-ray equipmentDocumento4 páginasSaudi Aramco radiation protection requirements for analytical x-ray equipmentzapAinda não há avaliações
- Flow of Fluids: Prepared By: Ankita Yagnik Assistant Professor Akshar-Preet Institute of Pharmacy, JamnagarDocumento47 páginasFlow of Fluids: Prepared By: Ankita Yagnik Assistant Professor Akshar-Preet Institute of Pharmacy, JamnagarUrmit ParmarAinda não há avaliações
- 3 Asian Physics Olympiad: Experimental CompetitionDocumento6 páginas3 Asian Physics Olympiad: Experimental CompetitionMed yahyaAinda não há avaliações
- MAA Using Sound Waves To Study Climate ChangeDocumento6 páginasMAA Using Sound Waves To Study Climate ChangeTsang ColinAinda não há avaliações
- Gravitation MCQDocumento22 páginasGravitation MCQHarinder Grover50% (2)
- Fundamentals of Fluid Mechanics: November 2015Documento6 páginasFundamentals of Fluid Mechanics: November 2015Sonam Lhendup DorjiAinda não há avaliações