Você também pode gostar
- Computer Organization & Design The Hardware/Software Interface, 2nd Edition Patterson & HennessyDocumento118 páginasComputer Organization & Design The Hardware/Software Interface, 2nd Edition Patterson & HennessyMr.Puppy80% (5)
- Assignment - 1Documento4 páginasAssignment - 1ZAEEM SULTAN KHAN0% (1)
- Full Solution Manual For Modern Processor Design by John Paul Shen and Mikko H. Lipasti PDFDocumento18 páginasFull Solution Manual For Modern Processor Design by John Paul Shen and Mikko H. Lipasti PDFtargetiesAinda não há avaliações
- Problems Chapter 17 Parallel Processsing: 17.14 An Application Program Is Executed On A Nine-Computer Cluster. ADocumento4 páginasProblems Chapter 17 Parallel Processsing: 17.14 An Application Program Is Executed On A Nine-Computer Cluster. A8Rafi Ahmad FadhlanAinda não há avaliações
- Thermit Australia Product Catalogue 2012Documento20 páginasThermit Australia Product Catalogue 2012Rey Luis TehAinda não há avaliações
- BPM Third Wave Smith Fingar Apr2003 PDFDocumento10 páginasBPM Third Wave Smith Fingar Apr2003 PDFNadeem AzadAinda não há avaliações
- Abs/Tcs/Esp Training GuideDocumento136 páginasAbs/Tcs/Esp Training GuideKatapangTkrAinda não há avaliações
- Cse4302a1 SolDocumento4 páginasCse4302a1 SolRajesh TiwaryAinda não há avaliações
- Quiz Chapter 1 Computer AbstractionsDocumento12 páginasQuiz Chapter 1 Computer AbstractionsAlejandro Delgadillo DuranAinda não há avaliações
- Sample Exam QuestionsDocumento9 páginasSample Exam QuestionsRam PrasadAinda não há avaliações
- Quiz For Chapter 1 With SolutionsDocumento6 páginasQuiz For Chapter 1 With SolutionsThọ LêAinda não há avaliações
- Comp Architecture Sample QuestionsDocumento9 páginasComp Architecture Sample QuestionsMohamaad SihatthAinda não há avaliações
- PH 4 QuizDocumento119 páginasPH 4 Quizstudent1985100% (1)
- TUT2Documento3 páginasTUT2razaAinda não há avaliações
- Exercises Chap 2Documento4 páginasExercises Chap 2Thought CatalogueAinda não há avaliações
- Assignment1 4Documento5 páginasAssignment1 4Munim DheemanAinda não há avaliações
- Bim305 A1Documento2 páginasBim305 A1Mr BalAinda não há avaliações
- ECE 452: Computer Organization and DesignDocumento9 páginasECE 452: Computer Organization and Designdermeister1988Ainda não há avaliações
- Ovn MainDocumento54 páginasOvn MainAvenir BajraktariAinda não há avaliações
- Sof108 Computer Architecture SESSION: September 2019 TUTORIAL 2 - Quantitative Principles of Computer DesignDocumento3 páginasSof108 Computer Architecture SESSION: September 2019 TUTORIAL 2 - Quantitative Principles of Computer DesignMariamAinda não há avaliações
- PracticeProblems COA8eDocumento40 páginasPracticeProblems COA8eAnousith PhompidaAinda não há avaliações
- 計 算 機 組 織 H O M E W O R K # 1 D U E: 1 1 1 - 3 - 1 5 上 午 9: 2 0Documento2 páginas計 算 機 組 織 H O M E W O R K # 1 D U E: 1 1 1 - 3 - 1 5 上 午 9: 2 0夜澄纓Ainda não há avaliações
- ELEC2300 Homework 1Documento2 páginasELEC2300 Homework 1李卓倫Ainda não há avaliações
- Unit 5 BardDocumento8 páginasUnit 5 BardlojsdwiGWAinda não há avaliações
- Model Answers Hw1 - Chapter 2 & 3Documento7 páginasModel Answers Hw1 - Chapter 2 & 3Kavya suresh pc0% (1)
- hw1 11 12 13 16 31 12 33 PDFDocumento7 páginashw1 11 12 13 16 31 12 33 PDFNguyễn Thành HiệpAinda não há avaliações
- hw1 11 12 13 16 31 12 33 PDFDocumento7 páginashw1 11 12 13 16 31 12 33 PDFKavya suresh pcAinda não há avaliações
- HW 05Documento6 páginasHW 05samadAinda não há avaliações
- CA Assignment 2Documento2 páginasCA Assignment 2Touseef sultan50% (2)
- Midtermarch 2Documento9 páginasMidtermarch 2Ghina BaassiriAinda não há avaliações
- Lecture 3Documento19 páginasLecture 3Anam GhaffarAinda não há avaliações
- Sheet 1Documento2 páginasSheet 1Muhammad SalahAinda não há avaliações
- MIPS Lecture: Performance Metrics and InstructionsDocumento22 páginasMIPS Lecture: Performance Metrics and InstructionsHariharan SAinda não há avaliações
- EE6304 Tut2Documento2 páginasEE6304 Tut2Siddharth SatyapriyaAinda não há avaliações
- Computer Architecture and Organization Ch#2 ExamplesDocumento6 páginasComputer Architecture and Organization Ch#2 ExamplesMekonnen WubshetAinda não há avaliações
- Full Solution Manual For Modern Processor Design by John Paul Shen and Mikko H. LipastiDocumento27 páginasFull Solution Manual For Modern Processor Design by John Paul Shen and Mikko H. Lipastitargeties50% (2)
- Solution Manual For Modern Processor Design by John Paul Shen and Mikko H. LipastiDocumento11 páginasSolution Manual For Modern Processor Design by John Paul Shen and Mikko H. LipastitargetiesAinda não há avaliações
- Updated Solution Manual For Modern Processor Design by John Paul Shen and Mikko H. LipastiDocumento8 páginasUpdated Solution Manual For Modern Processor Design by John Paul Shen and Mikko H. LipastitargetiesAinda não há avaliações
- Tutorial 1Documento2 páginasTutorial 1Borotho Molemo100% (1)
- Cs 6303 Computer Architecture Question Bank Unit I Overview and Instructions Part-ADocumento6 páginasCs 6303 Computer Architecture Question Bank Unit I Overview and Instructions Part-AvigneshAinda não há avaliações
- Performance MeasuresDocumento25 páginasPerformance MeasuresMuckie MarfeAinda não há avaliações
- KTMT AssignmentsDocumento3 páginasKTMT AssignmentsNguyên NguyễnAinda não há avaliações
- TD Micro Chap1 With Sol-2022Documento4 páginasTD Micro Chap1 With Sol-2022Eliana IbrahimAinda não há avaliações
- Lecture4 Performance Evaluation 2011Documento34 páginasLecture4 Performance Evaluation 2011bakaasamaAinda não há avaliações
- HW Problems Chapter-1Documento3 páginasHW Problems Chapter-1William DoveAinda não há avaliações
- COA AssignmentsDocumento3 páginasCOA Assignmentsmagi9999Ainda não há avaliações
- Ca 6303-CaDocumento26 páginasCa 6303-Cacs0814Ainda não há avaliações
- Exam 2 Review AnswersDocumento3 páginasExam 2 Review AnswersAbhishekChakladarAinda não há avaliações
- Bai Tap01Documento3 páginasBai Tap01Curacao JTRAinda não há avaliações
- ECE 311 Computer Architecture Assignment 1 GuideDocumento3 páginasECE 311 Computer Architecture Assignment 1 Guidelillyren2808Ainda não há avaliações
- Lecture 3: Performance/Power, MIPS InstructionsDocumento18 páginasLecture 3: Performance/Power, MIPS Instructionskotewed571Ainda não há avaliações
- Lab Guide 1: Instruction Level Parallelism and Matrix MultiplicationDocumento3 páginasLab Guide 1: Instruction Level Parallelism and Matrix MultiplicationJoão LourençoAinda não há avaliações
- Assignment Nov 19Documento7 páginasAssignment Nov 19CSE AAinda não há avaliações
- Exam - Chinese PDFDocumento81 páginasExam - Chinese PDFmlachake1978100% (1)
- Assignment: - 4Documento7 páginasAssignment: - 4nikita_gupta3Ainda não há avaliações
- Python Advanced Programming: The Guide to Learn Python Programming. Reference with Exercises and Samples About Dynamical Programming, Multithreading, Multiprocessing, Debugging, Testing and MoreNo EverandPython Advanced Programming: The Guide to Learn Python Programming. Reference with Exercises and Samples About Dynamical Programming, Multithreading, Multiprocessing, Debugging, Testing and MoreAinda não há avaliações
- Intermediate C Programming for the PIC Microcontroller: Simplifying Embedded ProgrammingNo EverandIntermediate C Programming for the PIC Microcontroller: Simplifying Embedded ProgrammingAinda não há avaliações
- Projects With Microcontrollers And PICCNo EverandProjects With Microcontrollers And PICCNota: 5 de 5 estrelas5/5 (1)
- Foundation Course for Advanced Computer StudiesNo EverandFoundation Course for Advanced Computer StudiesAinda não há avaliações
- C Programming for the Pc the Mac and the Arduino Microcontroller SystemNo EverandC Programming for the Pc the Mac and the Arduino Microcontroller SystemAinda não há avaliações
- C Programming for the PIC Microcontroller: Demystify Coding with Embedded ProgrammingNo EverandC Programming for the PIC Microcontroller: Demystify Coding with Embedded ProgrammingAinda não há avaliações
- Quality Criterion of Road Lighting Measurement and ExploringDocumento96 páginasQuality Criterion of Road Lighting Measurement and ExploringNitin UpadhyayAinda não há avaliações
- Kali Linux For BeginnersDocumento13 páginasKali Linux For Beginnersnihal0% (1)
- Psan en Tcd210185ab 20220523 Inst WDocumento2 páginasPsan en Tcd210185ab 20220523 Inst Wsinar automationAinda não há avaliações
- Digital Transformation in The Age of The Customer POVDocumento12 páginasDigital Transformation in The Age of The Customer POVjasmineAinda não há avaliações
- Xiv 11.5.1 XcliDocumento704 páginasXiv 11.5.1 XcliMuthu LAinda não há avaliações
- PLSQL 6 1 PracticeDocumento5 páginasPLSQL 6 1 PracticeHahaAinda não há avaliações
- Thomson VTH 7090 VCR ManualDocumento33 páginasThomson VTH 7090 VCR ManualTrickyDicky2Ainda não há avaliações
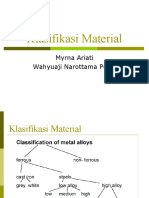
- Klasifikasi Material: Myrna Ariati Wahyuaji Narottama PutraDocumento49 páginasKlasifikasi Material: Myrna Ariati Wahyuaji Narottama Putrachink07Ainda não há avaliações
- 18,21. Naidian CatalogueDocumento31 páginas18,21. Naidian CatalogueTaQuangDucAinda não há avaliações
- Catalogo Recordplus General ElectricDocumento12 páginasCatalogo Recordplus General ElectricDruen Delgado MirandaAinda não há avaliações
- Combination Woodworking Machine Quotation PDFDocumento2 páginasCombination Woodworking Machine Quotation PDFAlunel TapuAinda não há avaliações
- Ibm Lenovo Whistler Rev s1.3 SCHDocumento52 páginasIbm Lenovo Whistler Rev s1.3 SCH1cvbnmAinda não há avaliações
- Mohr's Circle Analysis of Rock Failure Under StressDocumento26 páginasMohr's Circle Analysis of Rock Failure Under StressNitishAinda não há avaliações
- EN 12663-1 - 2010 - IndiceDocumento6 páginasEN 12663-1 - 2010 - IndiceOhriol Pons Ribas67% (3)
- Specification Substation AutomationDocumento258 páginasSpecification Substation Automationmspd2003100% (1)
- Slip and Crystallographic TexturesDocumento34 páginasSlip and Crystallographic TexturesSunkulp GoelAinda não há avaliações
- Aniosyme DD1 SDSDocumento6 páginasAniosyme DD1 SDSSherwin CruzAinda não há avaliações
- Control your ship with Kobelt electronic controlsDocumento36 páginasControl your ship with Kobelt electronic controlsBERANGER DAVESNE DJOMALIA SIEWEAinda não há avaliações
- Arahan Penggunaan Lahan Dan Perencanaan Konservasi Tanah Dan Air Di Das Yeh Empas, Tabanan, BaliDocumento9 páginasArahan Penggunaan Lahan Dan Perencanaan Konservasi Tanah Dan Air Di Das Yeh Empas, Tabanan, BalialyciaAinda não há avaliações
- ISa GRAFDocumento18 páginasISa GRAFEdwin MateusAinda não há avaliações
- ECOSYS M6526cdn Fax SetupDocumento204 páginasECOSYS M6526cdn Fax SetupAnonymous gn8qxxAinda não há avaliações
- Electric Rolling Bridge, Scientific American 24 August 1889 p120Documento2 páginasElectric Rolling Bridge, Scientific American 24 August 1889 p120Rm1262Ainda não há avaliações
- University Institute of Information Technology: Ouick Learn - MCQDocumento53 páginasUniversity Institute of Information Technology: Ouick Learn - MCQvimalAinda não há avaliações
- Phoenix Contact 3247055 enDocumento6 páginasPhoenix Contact 3247055 enDGAinda não há avaliações
- Geberit Sanitary Catalogue 2017 2018Documento348 páginasGeberit Sanitary Catalogue 2017 2018Po MoAinda não há avaliações
- Aerodrome Controller (ADC) ExamDocumento5 páginasAerodrome Controller (ADC) ExamaxnpicturesAinda não há avaliações
- MSDS 42935Documento3 páginasMSDS 42935EliasAinda não há avaliações